
背景
本文用于记录平衡自行车的制作过程,及制作中遇到的问题;总体方案如下:采用STM32F103C8T6作为主控单元、MPU6050作为位姿采集单元、无刷电机带动动量轮调节小车平衡、1S锂电池配合5V和12V升压模块作为电源、蓝牙模块用于和微信小程序进行无线遥控及PID调试、舵机用于控制行驶方向和支撑小车站立。
MPU-6050简介
MPU-6050集成了 3 轴陀螺仪、3 轴加速度计及温度传感器,并且预留一个IIC 接口,可用于连接外部磁力传感器,并利用自带的数字运动处理器(DMP: Digital Motion Processor)硬件加速引擎,通过主 IIC 接口,向应用端输出完整的 9 轴融合演算数据。
MPU-6050 对陀螺仪和加速度计分别用了三个16 位的ADC(0~65535),将其测量的模拟量转化为可输出的数字量。且传感器的测量范围都是可以根据需求设定的,陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4,±8,±16g。

MPU-6050姿态获取与处理(惭愧,我也一知半解)
理论上只需要对3轴陀螺仪的角度进行积分,就可以得到MPU-6050的姿态数据。实际上由于陀螺仪受噪声的影响,只对陀螺仪积分并不能得到完全准确的姿态,所以需要用加速度计进行辅助矫正,常用的方法有三种:互补滤波、卡尔曼滤波、硬件DMP解算四元数。
![3M4ZAPN6Y61O]`Q(`F`%P%T.png](data/attachment/forum/202302/09/170427mgzmkt5gm0t55zum.png "3M4ZAPN6Y61O]`Q(`F`%P%T.png")
互补滤波、卡尔曼滤波计算位姿示例
![LTC%Z6L{1J6%~U}3VE@]A$P.png](data/attachment/forum/202302/09/170204p7vymlmvlvm7nyz6.png "LTC%Z6L{1J6%~U}3VE@]A$P.png")
互补滤波、卡尔曼滤波计算位姿示例
除了使用加速度计计算的噪声较大,卡尔曼滤波,一阶互补滤波,二阶互补滤波看着差不多,O(∩_∩)O哈哈~(四元数计算的示例就不演示了,有兴趣的可以自己研究一下。)
1)一阶互补滤波:因为加速度计有高频噪声,陀螺仪有低频噪声,需要互补滤波融合得到较可靠的角度值。
2)卡尔曼滤波:利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程(来源于百度词条,我也看不懂这说的啥)。
3)硬件DMP解算四元数:DMP将原始数据直接转换成四元数输出,运用欧拉角转换算法,从而得到Yaw、Roll和Pitch(使用四元数计算位姿,好像会将初始化的位姿设定为零位)。
![~3FY21~}NEG2BK(M@DI]NBR.png](data/attachment/forum/202302/09/170204uyy7e3efeczz8eiz.png "~3FY21~}NEG2BK(M@DI]NBR.png")
一、一阶互补滤波算法
MPU-6050 的加速度计和陀螺仪各有优缺点,三轴的加速度值没有累积误差,通过简单的计算即可得到倾角,但是它包含的噪声太多(因为待测物运动时会产生加速度,电机运行时振动会产生加速度等),不能直接使用;陀螺仪对外界振动影响小,精度高,通过对角速度积分可以得到倾角,但是会产生累积误差。所以不能单独使用MPU-6050的加速度计或陀螺仪来得到倾角,需要二者进行互补。一阶互补算法的思想就是给加速度和陀螺仪不同的权值,把它们结合到一起进行修正,通过加速度和角速度就可以计算 Pitch 和 Roll 角(单靠 MPU6050 无法准确得到 Yaw 角,需要和地磁传感器结合使用)。
一阶互补算法如下:
- //一阶互补滤波
- float K1 =0.1; // 对加速度计取值的权重
- float FirstOrder_Pitch;
- float FirstOrder(float newAngle, float newRate, float dt)//采集后计算的角度和角加速度
- {
- FirstOrder_Pitch = K1 * newAngle + (1-K1) * (angle + newRate * dt);
- return FirstOrder_Pitch;
- }
二阶互补算法如下:
- //二阶互补滤波
- float K2 =0.2; // 对加速度计取值的权重
- float x1,x2,y1;
- float SecondOrder_Pitch;
- float SecondOrder(float newAngle, float newRate, float dt)//采集后计算的角度和角加速度
- {
- x1=(newAngle-SecondOrder_Pitch)*(1-K2)*(1-K2);
- y1=y1+x1*dt;
- x2=y1+2*(1-K2)*(newAngle-SecondOrder_Pitch)+newRate;
- SecondOrder_Pitch=SecondOrder_Pitch+ x2*dt;
- return SecondOrder_Pitch;
- }
二、卡尔曼滤波
- /* Kalman filter variables */
- float Q_angle = 0.001; // Process noise variance for the accelerometer
- float Q_bias = 0.003; // Process noise variance for the gyro bias
- float R_measure = 0.03; // Measurement noise variance - this is actually the variance of the measurement noise
- float angle = 0.0; // The angle calculated by the Kalman filter - part of the 2x1 state vector
- float bias = 0.0; // The gyro bias calculated by the Kalman filter - part of the 2x1 state vector
- float rate; // Unbiased rate calculated from the rate and the calculated bias - you have to call getAngle to update the rate
- float P[2][2]={0.0,0.0,0.0,0.0}; // Error covariance matrix - This is a 2x2 matrix
- // The angle should be in degrees and the rate should be in degrees per second and the delta time in seconds
- float Kalman_filter(float newAngle, float newRate, float dt) {
- // KasBot V2 - Kalman filter module - http://www.x-firm.com/?page_id=145
- // Modified by Kristian Lauszus
- // See my blog post for more information: http://blog.tkjelectronics.dk/2012/09/a-practical-approach-to-kalman-filter-and-how-to-implement-it
- // Discrete Kalman filter time update equations - Time Update ("Predict")
- // Update xhat - Project the state ahead
- /* Step 1 */
- rate = newRate - bias;
- angle += dt * rate;
- // Update estimation error covariance - Project the error covariance ahead
- /* Step 2 */
- P[0][0] += dt * (dt*P[1][1] - P[0][1] - P[1][0] + Q_angle);
- P[0][1] -= dt * P[1][1];
- P[1][0] -= dt * P[1][1];
- P[1][1] += Q_bias * dt;
- // Discrete Kalman filter measurement update equations - Measurement Update ("Correct")
- // Calculate Kalman gain - Compute the Kalman gain
- /* Step 4 */
- float S = P[0][0] + R_measure; // Estimate error
- /* Step 5 */
- float K[2]; // Kalman gain - This is a 2x1 vector
- K[0] = P[0][0] / S;
- K[1] = P[1][0] / S;
- // Calculate angle and bias - Update estimate with measurement zk (newAngle)
- /* Step 3 */
- float y = newAngle - angle; // Angle difference
- /* Step 6 */
- angle += K[0] * y;
- bias += K[1] * y;
- // Calculate estimation error covariance - Update the error covariance
- /* Step 7 */
- float P00_temp = P[0][0];
- float P01_temp = P[0][1];
- P[0][0] -= K[0] * P00_temp;
- P[0][1] -= K[0] * P01_temp;
- P[1][0] -= K[1] * P00_temp;
- P[1][1] -= K[1] * P01_temp;
- return angle;
- };
三、四元数法
MPU-6050 自带了数字运动处理器,即 DMP,并且InvenSense公司 提供了一个 MPU-6050 的嵌入式运动驱动库,结合 MPU-6050 的 DMP,可以将我们的原始数据直接转换成四元数输出,而得到四元数之后,可以很方便的计算出欧拉角,从而得到 Yaw、Roll 和Pitch。
使用内置的 DMP,大大简化了代码设计,且 MCU 不用进行姿态解算过程,大大降低了 MCU 的负担,从而有更多的时间去处理其他事件,提高系统实时性。
- void Read_DMP(float *Pitch,float *Roll,float *Yaw)
- {
- unsigned long sensor_timestamp;
- unsigned char more;
- long quat[4];
- dmp_read_fifo(gyro, accel, quat, &sensor_timestamp, &sensors, &more);
- if (sensors & INV_WXYZ_QUAT )
- {
- q0=quat[0] / q30;
- q1=quat[1] / q30;
- q2=quat[2] / q30;
- q3=quat[3] / q30;
- *Pitch = asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3;
- *Roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; // roll
- *Yaw = atan2(2*(q1*q2 + q0*q3),q0*q0+q1*q1-q2*q2-q3*q3) * 57.3; //yaw
- }
- }
以下是我测试一阶互补滤波和卡尔曼滤波项目的搭建过程,老鸟请忽略。
固件开发采用STM32CubeIDE开发,对于我这种菜鸡来说还是很友好的。
我使用的是STM32CubeIDE1.9.0,打开软件后,依次点击 File-->New-->Stm32 Project,弹出如下界面,输入MCU型号-->选择封装形式-->Next
![6Z1)SWD0)NGR@]O%J3~_A`G.png](data/attachment/forum/202302/09/170203zb0gqqav0gog6low.png "6Z1)SWD0)NGR@]O%J3~_A`G.png")
输入工程名字,点击Next

设置完成后,点击Finish
W%A{MBY6WZ9DC`3B@F1KM8.png")
进入MCU配置界面

设置I2C与MPU-6050通讯。
$Q.png")
设置串口与上位机通讯,实时显示MPU-6050位姿。
![ZJQU$P3UR1R4)729_G][%{S.png](data/attachment/forum/202302/09/170201kdda6zlgw00mt70l.png "ZJQU$P3UR1R4)729_G][%{S.png")
设置系统时钟及调试模式。

设置时钟源。
~J44.png")
全部设置好后,芯片引脚的分配情况。
$R5{_){T9V@T.png")
在时钟配置里设置时钟最大频率。

在工程管理——>代码生成器中进行设置

点击此处,生成代码

在工程文件夹中创建iCode文件。

将MPU-6050、卡尔曼滤波库文件复制到iCode文件中。
$$FIFDRGQDM6W1.png")
点击Debug,刚刚添加的驱动文件全部在工程文件中显示出来。

按照下列方式设置MPU-6050、卡尔曼滤波驱动文件的编译路径。
$_$FQL20QWJM(8)A.png")
![WQUT]3V991@5_$%1Q%8XS`S.png](data/attachment/forum/202302/09/170157t5g5d0z5d7grd79s.png "WQUT]3V991@5_$%1Q%8XS`S.png")
然后再main.c文件中添加如下代码,用于重定义printf函数,用于串口输出;获取系统时间,用于滤波。
- /* USER CODE END Header */
- /* Includes ------------------------------------------------------------------*/
- #include "main.h"
- #include "i2c.h"
- #include "usart.h"
- #include "gpio.h"
- /* Private includes ----------------------------------------------------------*/
- /* USER CODE BEGIN Includes */
- #include "mpu6050.h"
- #include <stdio.h>
- /* USER CODE END Includes */
- /* Private typedef -----------------------------------------------------------*/
- /* USER CODE BEGIN PTD */
- /* USER CODE END PTD */
- /* Private define ------------------------------------------------------------*/
- /* USER CODE BEGIN PD */
- /* USER CODE END PD */
- /* Private macro -------------------------------------------------------------*/
- /* USER CODE BEGIN PM */
- /* USER CODE END PM */
- /* Private variables ---------------------------------------------------------*/
- /* USER CODE BEGIN PV */
- //重定义printf函数,用于串口输出
- #ifdef __GNUC__
- #define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
- #else
- #define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
- #endif
- PUTCHAR_PROTOTYPE
- {
- HAL_UART_Transmit(&huart1, (uint8_t*)&ch,1,HAL_MAX_DELAY);
- return ch;
- }
- /* ---------------------------------------------------------------------------*/
- //获取系统时间,用于卡尔曼滤波
- __STATIC_INLINE uint32_t GXT_SYSTICK_IsActiveCounterFlag(void)
- {
- return ((SysTick->CTRL & SysTick_CTRL_COUNTFLAG_Msk) == (SysTick_CTRL_COUNTFLAG_Msk));
- }
- static uint32_t getCurrentMicros(void)
- {
- /* Ensure COUNTFLAG is reset by reading SysTick control and status register */
- GXT_SYSTICK_IsActiveCounterFlag();
- uint32_t m = HAL_GetTick();
- const uint32_t tms = SysTick->LOAD + 1;
- __IO uint32_t u = tms - SysTick->VAL;
- if (GXT_SYSTICK_IsActiveCounterFlag()) {
- m = HAL_GetTick();
- u = tms - SysTick->VAL;
- }
- return (m * 1000 + (u * 1000) / tms);
- }
- //获取系统时间,单位us
- uint32_t micros(void)
- {
- return getCurrentMicros();
- }
- /* USER CODE END PV */
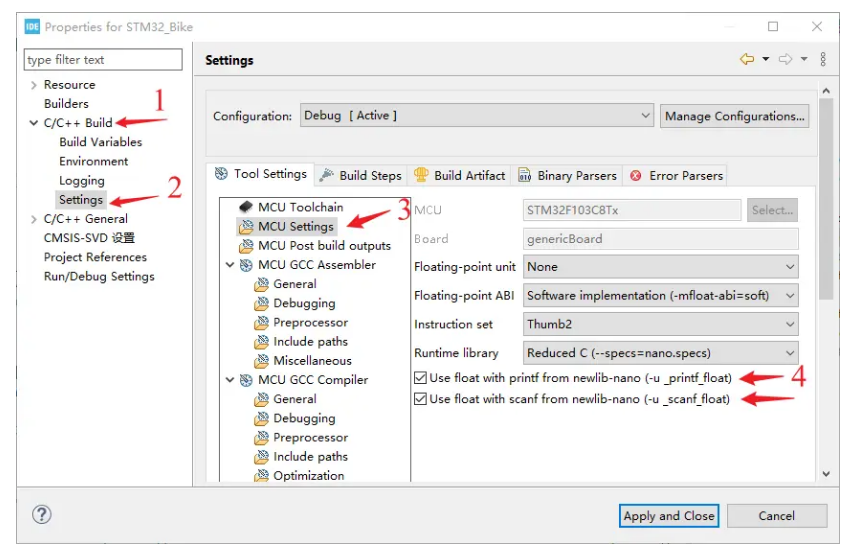
使用printf()函数,还需进行如下设置:点击菜单栏 Project-->properties,弹出如下界面
J.png](data/attachment/forum/202302/09/170156d1srmlxbeollmaef.png "[I](O`R0}YFTDA{2SX~2%)J.png")
在main()函数中添加MPU6050初始化代码和发送位姿数据代码
- int main(void)
- {
- /* USER CODE BEGIN 1 */
- /* USER CODE END 1 */
- /* MCU Configuration--------------------------------------------------------*/
- /* Reset of all peripherals, Initializes the Flash interface and the Systick. */
- HAL_Init();
- /* USER CODE BEGIN Init */
- /* USER CODE END Init */
- /* Configure the system clock */
- SystemClock_Config();
- /* USER CODE BEGIN SysInit */
- /* USER CODE END SysInit */
- /* Initialize all configured peripherals */
- MX_GPIO_Init();
- MX_I2C1_Init();
- MX_USART1_UART_Init();
- /* USER CODE BEGIN 2 */
- while (MPU_Init()){ //如果初始化失败,继续初始化
- printf("MPU_Init_Fail...");
- }
- /* USER CODE END 2 */
- /* Infinite loop */
- /* USER CODE BEGIN WHILE */
- while (1)
- {
- GetAngle();
- GetPitch();
- HAL_Delay(10);
- /* USER CODE END WHILE */
- /* USER CODE BEGIN 3 */
- }
- /* USER CODE END 3 */
- }
点击,下载程序

程序烧录好后就会通过串口通讯向上位机发送位姿数据(加速度计、卡尔曼、一阶二阶互补滤波计算的位姿),上位机我用的是Arduino编译器来接受并显示数据。设置好波特率后即可显示数据。
Y_NZ5.png")
作者:DIY攻城狮
|
.png) STMCU小助手
发布时间:2023-2-9 17:00
STMCU小助手
发布时间:2023-2-9 17:00
 微信公众号
微信公众号
 手机版
手机版










MPU-6050、卡尔曼滤波库在哪里呀