.png) STMCU小助手
发布时间:2023-2-9 17:33
STMCU小助手
发布时间:2023-2-9 17:33

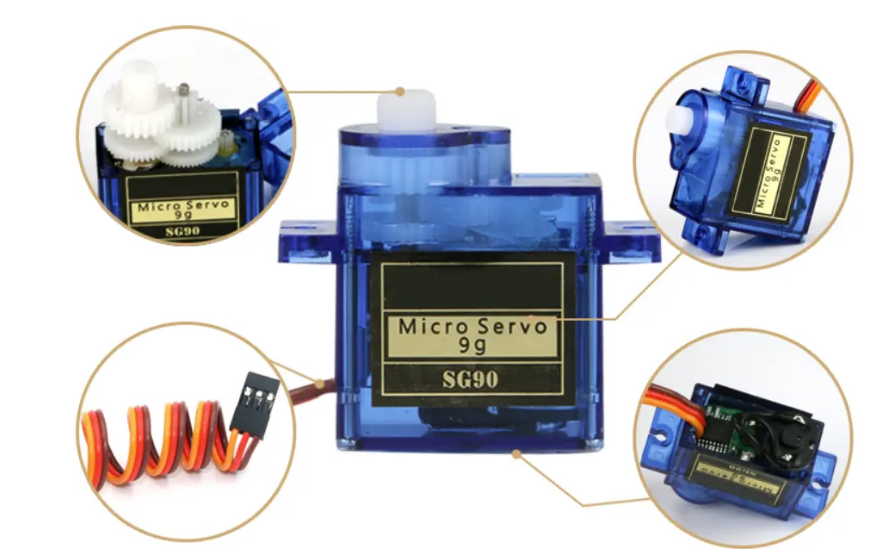
背景 本文用于记录平衡自行车的制作过程,及制作中遇到的问题;总体方案如下:采用采用STM32F103C8T6作为主控单元、MPU-6050作为位姿采集单元、0.96寸OLED显示位姿、无刷电机带动动量轮调节小车平衡、1S锂电池配合5V和12V升压模块作为电源、蓝牙模块用于无线控制及调试、SG90舵机用于控制行驶方向和支撑小车。 SG90舵机规格及参数简介 
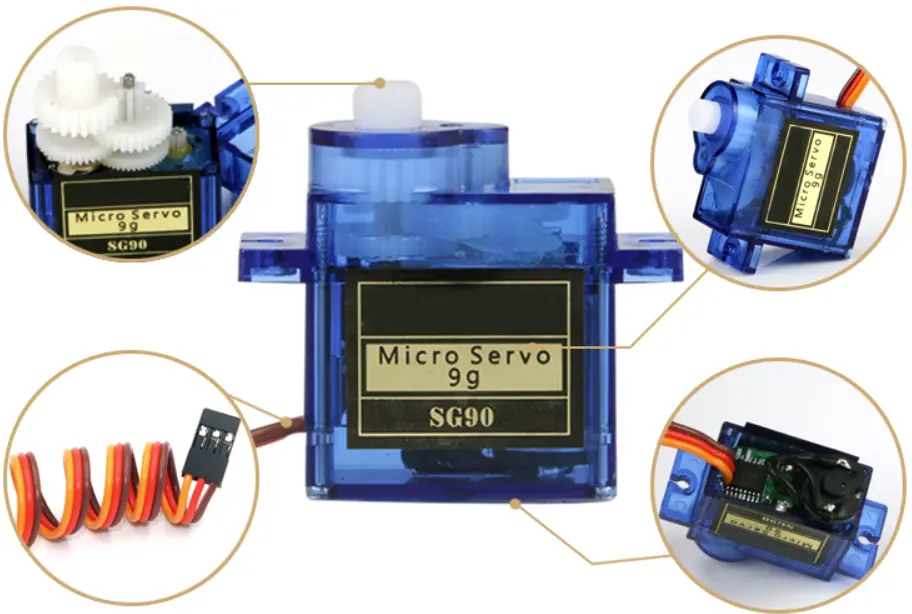 SG90舵机上有三根线,分别是GND(棕色线)、VCC(红色线)和SIG(黄色线),舵机通过接收PWM信号,使其进入内部电路产生一个偏置电压,触发电机通过减速齿轮带动电位器移动,使电压差为零时,电机停转,从而达到伺服的效果。即给舵机一个特定的PWM信号,舵机旋转到特定角度。 SG90舵机的控制需要一个20ms的时基脉冲,控制高电平时间为0.5ms~2.5ms范围内即可控制舵机在0 ~ 180°转动。 t=0.5ms---------------舵机转动到0° t=1.0ms---------------舵机转动到45° t=1.5ms---------------舵机转动到90° t=2.0ms---------------舵机转动到135° t=2.5ms---------------舵机转动到180° 高电平时间与角度的换算关系为: 高电平时间=0.5ms+(角度/180°)*2ms 驱动舵机 在上一篇专栏建立工程()的基础上,设置定时器2的通道1和通道2产生PWM信号控制舵机的运动。 
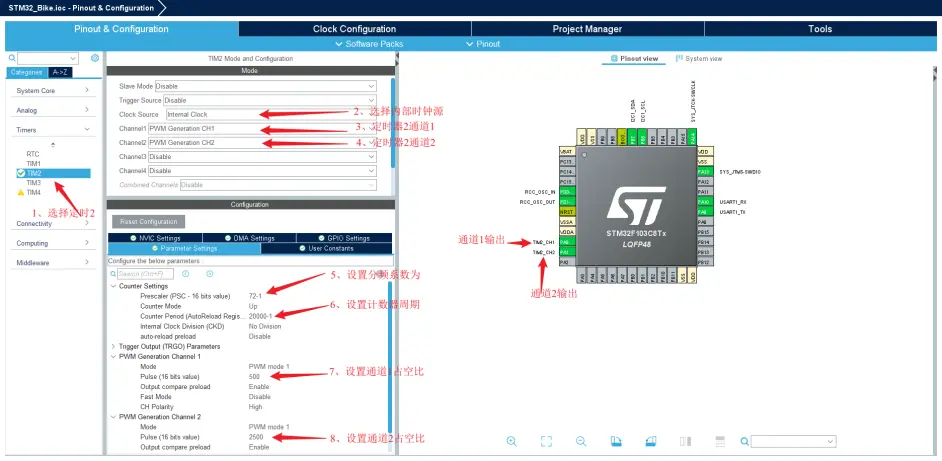 系统时钟频率:72MHz 预分频系数Prescaler:72 ,向上计数; 自动重装初值(ARR寄存器)Counter Period (AutoReload Register :20000 ; 此时定时器的中断时间是20ms, 计算方法是T = 72*20000/72MHz =20ms ; 舵机角度 = 180 *(Pluse - 500)/ 2000 Pluse 用于设置PWM的占空比 t=0.5ms---------------舵机转动到0°--------------- Pluse = 500 t=1.0ms---------------舵机转动到45°---------------Pluse = 1000 t=1.5ms---------------舵机转动到90°---------------Pluse = 1500 t=2.0ms---------------舵机转动到135°--------------Pluse = 2000 t=2.5ms---------------舵机转动到180°--------------Pluse = 2500 在main函数中添加下列代码,通过__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,500+servo1)函数控制PWM输出的占空比,从而控制舵机角度。
通道1和通道2控制的舵机运动状态如下所示:  
|
CubeMX生成CubeIDE工程代码乱码
STM32CubeIDE实时时钟(RTC)经验分享
实战经验 | ClassB功能安全认证代码与应用代码分区的实现要点
【STM32U3 评测】人体行为识别
【STM32U3 评测】串口控制步进电机与LabVIEW数据采集
实战经验 | STM32CubeIDE实用技巧之如何指定变量、函数、文件到指定内存
【STM32U3 评测】步进电机驱动
【STM32U3 评测】MNIST 数字识别
【STM32U3 评测】介绍、环境搭建、工程测试
STM32Cube嵌入式软件更新
 微信公众号
微信公众号
 手机版
手机版