.png) STMCU小助手
发布时间:2023-2-22 18:44
STMCU小助手
发布时间:2023-2-22 18:44
|
使用Platformio平台的libopencm3开发框架来开发STM32G0,以下为定时器timer的基本使用方法。
2 使用基本定时器
以下为设置定时器3的过程:
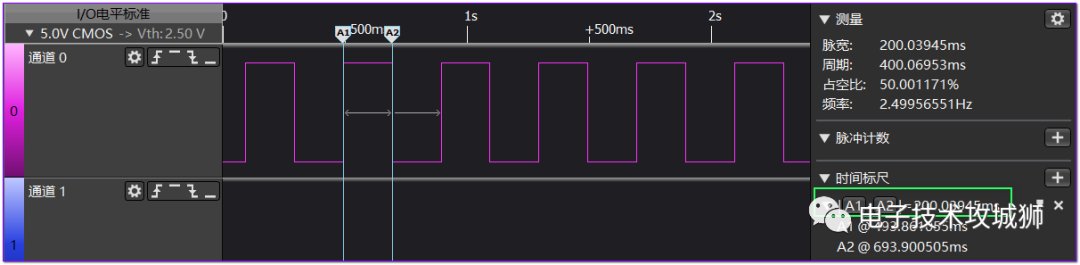
包括设置定时器的模式,使能定时器中断,定时器的中断频率通过 timer_set_prescaler 设置分频值和 timer_set_period 设置周期值,上面需要注意的是 timer_set_prescaler 设置分频值需要根据系统设置的时钟,如果APB1的分频为1,则TIM外设时钟和APB1相同,否则为其2倍,这里由于系统设置的时钟为64MHz,即APB1预分频为1,因此这里设置TIM分频为 rcc_apb1_frequency/100000-1,即100KHz;然后timer_set_period设置定时器周期为 20000-1,那么定时器中断频率为5Hz;
这里直接在中断中对GPIO进行翻转,即5Hz翻转一次GPIO,即200ms进行高低变化;
将程序烧写到开发板后,测量频率可以看到和预期一致: 
3 使用systick定时器3.1 systick 定时器设置
这里设置systick重载值为64000,因为系统设置时钟为64MHz,那么定时器的频率为1KHz,即1ms时间定时中断;
这里在中断函数里进行计数; 一般这个systick定时器在cortex-m芯片中都存在,因此比较通用,可以用作RTOS的时基或用作延时功能,比如根据上面的tick_counter计数可以实现类似Arduino中的millis方式编程:
这样就达到500ms的延时,而且不会对其他语句的执行造成影响; 转载自: MakerInChina.cn |
【福利三:逢7发帖赢大礼】4、基于STM32G070板子SPI flash 移植SFUD库
【福利三:逢7发帖赢大礼】基于STM32G070板子的uart shell移植设计
【福利三:逢7发帖赢大礼】3、基于STM32G070板子的YModem串口协议通信
【福利三:逢7发帖赢大礼】2、基于STM32G070板子的OLED移植U8G2库
实战经验 | ClassB功能安全认证代码与应用代码分区的实现要点
STM32G0 系列 I2C 通信异常典型案例分析与解决方案总结
经验分享 | LAT1490 两个STM32G0 I2C 通信异常的案例分析
经验分享 | STM32G0 I2C bootloader Go 命令后调试连接失败:DBG_SWEN 位复位修复
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
 微信公众号
微信公众号
 手机版
手机版