一、cube.AI实际项目应用
接篇二,前文都是采用FP-AI-SENSING1案例和配套的B-L475E-IOT01A开发板来阐述的,而实际项目中,我们都是基于自身项目硬件平台来训练模型及部署模型的,我们仅仅需要cube.AI软件包(作为可调用库)来支持我们项目,不会强行采用FP-AI-SENSING1案例去收集数据及配套的B-L475E-IOT01A等硬件平台部署。
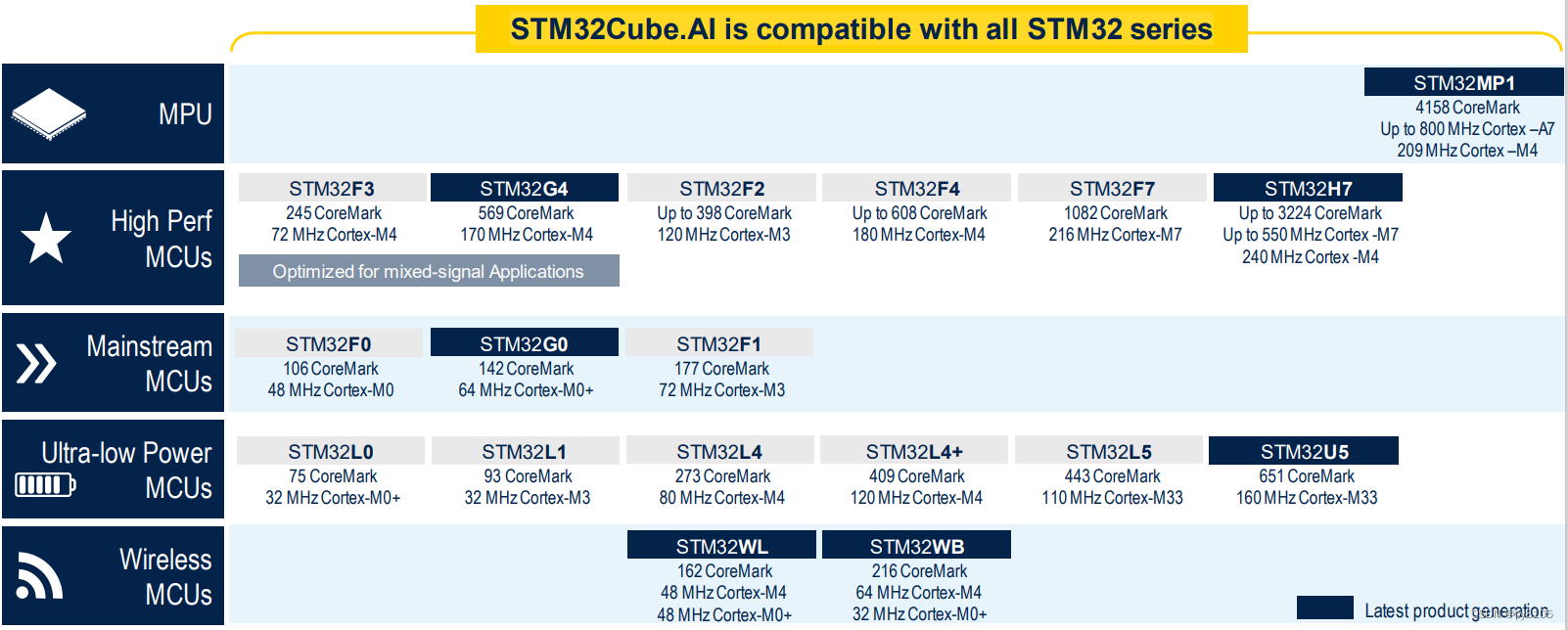
回顾篇一,ST公司支持到如下图芯片型号,

在本文中,将采用STM32L496VGT6-ali开发板来部署cube.AI实现人工智能。STM32L496VGT6开发板已经集成了LSM6DSL传感器(三轴加速度计及三轴陀螺仪传感器),项目设想如下:
1)通过LSM6DSL采集加速度数值(x/y/z三轴加速度)
2)本文只采集三种姿态(开发板正面朝上,静止不动、左右移动、上下移动三种姿态)时的加速度数值,用来实现分类神经网络,三种姿态作为神经网络模型输出值(分类)
3)每次输入读取三组加速度值(每组数据是读取x/y/z三轴的三个加速度值),共9个数值作为神经网络模型输入数据
4)利用STM32L496VGT6开发板上的三个按钮,KEY0为静止不动姿态采集按键,KEY1为左右移动姿态采集按键,KEY2为上下移动姿态采集按键。
5)通过串口打印输出采集数据信息,并通过串联助手连接获得采集日志并保存成TXT文件
6)将记录数据文件转换为csv文件,通过keras框架,编写神经网络训练模型python项目,进行神经网络模型训练,并输出.h5训练模型文件
7)通过cubeMX和cube.AI将h5神经网络模型转换为c语言神经网络模型
8)将LSM6DSL实时采集数据推送给c语言神经网络模型API,进行神经网络计算,查看输出结果是否符合预期。
二、创建工程
在CubeIDE上,基于STM32L496VGT6芯片,创建新工程STM32工程,并实现了串口lpuart1调试日志输出,三个按键KEY0~2和三个LED灯LED0~2的功能实现,并实现LSM6DSL传感器采集数据功能(I2C4)
现给出简要的配置及源码信息:
2.1 工程配置
1)内核功能配置及RCC开启外部时钟支持


2)开启LPUART1,并开启其中断支持


3)开启I2C4,并开启其中断功能及DMA功能


4)配置GPIO引脚(三个按键及三个LED灯)

5)配置时钟树

6)引脚视图

7)工程配置,选择为每个外设生成独立的.h/.c文件

生成输出代码
2.2 外设代码设计
禁用syscalls.c文件(右键进入文件属性设置页面)

在工程下,创建源目录ICore,在该目录下,如下图所示,创建子目录及外设驱动源文件

源码文件内容如下:
1)key.h- #ifndef KEY_H_
- #define KEY_H_
-
- #include "main.h"
- #include "gpio.h"
-
- GPIO_PinState get_key0_val();
- GPIO_PinState get_key1_val();
- GPIO_PinState get_key2_val();
-
- uint8_t KEY_0(void);
- uint8_t KEY_1(void);
- uint8_t KEY_2(void);
-
- #endif /* KEY_H_ */
key.c
- #include "key.h"
-
- GPIO_PinState get_key0_val()
- {
- return HAL_GPIO_ReadPin(KEY0_GPIO_Port,KEY0_Pin);
- };
-
- GPIO_PinState get_key1_val()
- {
- return HAL_GPIO_ReadPin(KEY1_GPIO_Port,KEY1_Pin);
- };
-
- GPIO_PinState get_key2_val()
- {
- return HAL_GPIO_ReadPin(KEY2_GPIO_Port,KEY2_Pin);
- };
-
- uint8_t KEY_0(void)
- {
- uint8_t a;
- a=0;//如果未进入按键处理,则返回0
- if(HAL_GPIO_ReadPin(KEY0_GPIO_Port,KEY0_Pin)==GPIO_PIN_RESET){//读按键接口的电平
- HAL_Delay(20);//延时去抖动
- if(HAL_GPIO_ReadPin(KEY0_GPIO_Port,KEY0_Pin)==GPIO_PIN_RESET){ //读按键接口的电平
- a=1;//进入按键处理,返回1
- }
- }
- while(HAL_GPIO_ReadPin(KEY0_GPIO_Port,KEY0_Pin)==GPIO_PIN_RESET); //等待按键松开
- return a;
- }
-
- uint8_t KEY_1(void)
- {
- uint8_t a;
- a=0;//如果未进入按键处理,则返回0
- if(HAL_GPIO_ReadPin(KEY1_GPIO_Port,KEY1_Pin)==GPIO_PIN_RESET){//读按键接口的电平
- HAL_Delay(20);//延时去抖动
- if(HAL_GPIO_ReadPin(KEY1_GPIO_Port,KEY1_Pin)==GPIO_PIN_RESET){ //读按键接口的电平
- a=1;//进入按键处理,返回1
- }
- }
- while(HAL_GPIO_ReadPin(KEY1_GPIO_Port,KEY1_Pin)==GPIO_PIN_RESET); //等待按键松开
- return a;
- }
-
- uint8_t KEY_2(void)
- {
- uint8_t a;
- a=0;//如果未进入按键处理,则返回0
- if(HAL_GPIO_ReadPin(KEY2_GPIO_Port,KEY2_Pin)==GPIO_PIN_RESET){//读按键接口的电平
- HAL_Delay(20);//延时去抖动
- if(HAL_GPIO_ReadPin(KEY2_GPIO_Port,KEY2_Pin)==GPIO_PIN_RESET){ //读按键接口的电平
- a=1;//进入按键处理,返回1
- }
- }
- while(HAL_GPIO_ReadPin(KEY2_GPIO_Port,KEY2_Pin)==GPIO_PIN_RESET); //等待按键松开
- return a;
- }
2) led.h
- #ifndef LED_H_
- #define LED_H_
- #include "main.h"
- #include "gpio.h"
-
- void Toggle_led0();
- void Toggle_led1();
- void Toggle_led2();
-
- void set_led0_val(GPIO_PinState PinState);
- void set_led1_val(GPIO_PinState PinState);
- void set_led2_val(GPIO_PinState PinState);
-
- #endif /* LED_H_ */
led.c
- #include "led.h"
-
- void Toggle_led0()
- {
- HAL_GPIO_TogglePin(LED0_GPIO_Port,LED0_Pin);
- }
-
- void Toggle_led1()
- {
- HAL_GPIO_TogglePin(LED1_GPIO_Port,LED1_Pin);
- }
-
- void Toggle_led2()
- {
- HAL_GPIO_TogglePin(LED2_GPIO_Port,LED2_Pin);
- }
-
- void set_led0_val(GPIO_PinState PinState)
- {
- HAL_GPIO_WritePin(LED0_GPIO_Port,LED0_Pin,PinState);
- };
-
- void set_led1_val(GPIO_PinState PinState)
- {
- HAL_GPIO_WritePin(LED1_GPIO_Port,LED1_Pin,PinState);
- };
-
- void set_led2_val(GPIO_PinState PinState)
- {
- HAL_GPIO_WritePin(LED2_GPIO_Port,LED2_Pin,PinState);
- };
3)print.h
- #ifndef INC_RETARGET_H_
- #define INC_RETARGET_H_
-
- #include "stm32l4xx_hal.h"
- #include "stdio.h"//用于printf函数串口重映射
- #include <sys/stat.h>
-
- void ResetPrintInit(UART_HandleTypeDef *huart);
-
- int _isatty(int fd);
- int _write(int fd, char* ptr, int len);
- int _close(int fd);
- int _lseek(int fd, int ptr, int dir);
- int _read(int fd, char* ptr, int len);
- int _fstat(int fd, struct stat* st);
-
- #endif /* INC_RETARGET_H_ */
print.c
- #include <_ansi.h>
- #include <_syslist.h>
- #include <errno.h>
- #include <sys/time.h>
- #include <sys/times.h>
- #include <limits.h>
- #include <signal.h>
- #include <stdint.h>
- #include <stdio.h>
-
- #include "print.h"
-
- #if !defined(OS_USE_SEMIHOSTING)
- #define STDIN_FILENO 0
- #define STDOUT_FILENO 1
- #define STDERR_FILENO 2
-
- UART_HandleTypeDef *gHuart;
-
- void ResetPrintInit(UART_HandleTypeDef *huart) {
- gHuart = huart;
- /* Disable I/O buffering for STDOUT stream, so that
- * chars are sent out as soon as they are printed. */
- setvbuf(stdout, NULL, _IONBF, 0);
- }
- int _isatty(int fd) {
- if (fd >= STDIN_FILENO && fd <= STDERR_FILENO)
- return 1;
- errno = EBADF;
- return 0;
- }
- int _write(int fd, char* ptr, int len) {
- HAL_StatusTypeDef hstatus;
- if (fd == STDOUT_FILENO || fd == STDERR_FILENO) {
- hstatus = HAL_UART_Transmit(gHuart, (uint8_t *) ptr, len, HAL_MAX_DELAY);
- if (hstatus == HAL_OK)
- return len;
- else
- return EIO;
- }
- errno = EBADF;
- return -1;
- }
- int _close(int fd) {
- if (fd >= STDIN_FILENO && fd <= STDERR_FILENO)
- return 0;
- errno = EBADF;
- return -1;
- }
- int _lseek(int fd, int ptr, int dir) {
- (void) fd;
- (void) ptr;
- (void) dir;
- errno = EBADF;
- return -1;
- }
- int _read(int fd, char* ptr, int len) {
- HAL_StatusTypeDef hstatus;
- if (fd == STDIN_FILENO) {
- hstatus = HAL_UART_Receive(gHuart, (uint8_t *) ptr, 1, HAL_MAX_DELAY);
- if (hstatus == HAL_OK)
- return 1;
- else
- return EIO;
- }
- errno = EBADF;
- return -1;
- }
- int _fstat(int fd, struct stat* st) {
- if (fd >= STDIN_FILENO && fd <= STDERR_FILENO) {
- st->st_mode = S_IFCHR;
- return 0;
- }
- errno = EBADF;
- return 0;
- }
-
- #endif //#if !defined(OS_USE_SEMIHOSTING)
4) usart.h
- #ifndef INC_USART_H_
- #define INC_USART_H_
-
- #include "stm32l4xx_hal.h" //HAL库文件声明
- #include <string.h>//用于字符串处理的库
- #include "../print/print.h"//用于printf函数串口重映射
-
- extern UART_HandleTypeDef hlpuart1;//声明LPUSART的HAL库结构体
-
- #define HLPUSART_REC_LEN 256//定义LPUSART最大接收字节数
-
- extern uint8_t HLPUSART_RX_BUF[HLPUSART_REC_LEN];//接收缓冲,最大HLPUSART_REC_LEN个字节.末字节为换行符
- extern uint16_t HLPUSART_RX_STA;//接收状态标记
- extern uint8_t HLPUSART_NewData;//当前串口中断接收的1个字节数据的缓存
-
-
- void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);//串口中断回调函数声明
-
- #endif /* INC_USART_H_ */
usart.c
- #include "usart.h"
-
- uint8_t HLPUSART_RX_BUF[HLPUSART_REC_LEN];//接收缓冲,最大HLPUSART_REC_LEN个字节.末字节为换行符
- /*
- * bit15:接收到回车(0x0d)时设置HLPUSART_RX_STA|=0x8000;
- * bit14:接收溢出标志,数据超出缓存长度时,设置HLPUSART_RX_STA|=0x4000;
- * bit13:预留
- * bit12:预留
- * bit11~0:接收到的有效字节数目(0~4095)
- */
- uint16_t HLPUSART_RX_STA=0;接收状态标记//bit15:接收完成标志,bit14:接收到回车(0x0d),bit13~0:接收到的有效字节数目
- uint8_t HLPUSART_NewData;//当前串口中断接收的1个字节数据的缓存
-
- void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)//串口中断回调函数
- {
- if(huart ==&hlpuart1)//判断中断来源(串口1:USB转串口)
- {
- if(HLPUSART_NewData==0x0d){//回车标记
- HLPUSART_RX_STA|=0x8000;//标记接到回车
- }else{
- if((HLPUSART_RX_STA&0X0FFF)<HLPUSART_REC_LEN){
- HLPUSART_RX_BUF[HLPUSART_RX_STA&0X0FFF]=HLPUSART_NewData; //将收到的数据放入数组
- HLPUSART_RX_STA++; //数据长度计数加1
- }else{
- HLPUSART_RX_STA|=0x4000;//数据超出缓存长度,标记溢出
- }
- }
- HAL_UART_Receive_IT(&hlpuart1,(uint8_t *)&HLPUSART_NewData,1); //再开启接收中断
- }
- }
5) LSM6DSL.h
- #ifndef _LSM6DSL_H_
- #define _LSM6DSL_H_
-
- #include "main.h"
-
- void LSM6DSL_init();
- //
- uint8_t LSM6DSL_acc_st_open(void);
- uint8_t LSM6DSL_acc_st_close(void);
-
- uint8_t LSM6DSL_gyro_st_open(void);
- uint8_t LSM6DSL_gyro_st_close(void);
-
- uint8_t LSM6DSL_acc_read(int32_t *x_data,int32_t *y_data,int32_t *z_data);
- uint8_t LSM6DSL_gyro_read(int32_t *x_data,int32_t *y_data,int32_t *z_data);
-
- #endif /* LSM6DSL_LSM6DSL_H_ */
LSM6DSL.c,实现传感器的ID检验、软重置、模式设置、数据读取及转换功能。
- #include <stdio.h>
- #include "LSM6DSL.h"
-
- extern I2C_HandleTypeDef hi2c4;
-
- #define LSM6DSL_I2C_ADDR1 (0x6A)
- #define LSM6DSL_I2C_ADDR2 (0x6B)
- #define LSM6DSL_I2C_ADDR_TRANS(n) ((n) << 1)
- #define LSM6DSL_I2C_ADDR LSM6DSL_I2C_ADDR_TRANS(LSM6DSL_I2C_ADDR2)
-
- #define LSM6DSL_ACC_GYRO_FUNC_CFG_ACCESS 0x01
- #define LSM6DSL_ACC_GYRO_SENSOR_SYNC_TIME 0x04
- #define LSM6DSL_ACC_GYRO_SENSOR_RES_RATIO 0x05
- #define LSM6DSL_ACC_GYRO_FIFO_CTRL1 0x06
- #define LSM6DSL_ACC_GYRO_FIFO_CTRL2 0x07
- #define LSM6DSL_ACC_GYRO_FIFO_CTRL3 0x08
- #define LSM6DSL_ACC_GYRO_FIFO_CTRL4 0x09
- #define LSM6DSL_ACC_GYRO_FIFO_CTRL5 0x0A
- #define LSM6DSL_ACC_GYRO_DRDY_PULSE_CFG_G 0x0B
- #define LSM6DSL_ACC_GYRO_INT1_CTRL 0x0D
- #define LSM6DSL_ACC_GYRO_INT2_CTRL 0x0E
- #define LSM6DSL_ACC_GYRO_WHO_AM_I_REG 0x0F
- #define LSM6DSL_ACC_GYRO_CTRL1_XL 0x10
- #define LSM6DSL_ACC_GYRO_CTRL2_G 0x11
- #define LSM6DSL_ACC_GYRO_CTRL3_C 0x12
- #define LSM6DSL_ACC_GYRO_CTRL4_C 0x13
- #define LSM6DSL_ACC_GYRO_CTRL5_C 0x14
- #define LSM6DSL_ACC_GYRO_CTRL6_C 0x15
- #define LSM6DSL_ACC_GYRO_CTRL7_G 0x16
- #define LSM6DSL_ACC_GYRO_CTRL8_XL 0x17
- #define LSM6DSL_ACC_GYRO_CTRL9_XL 0x18
- #define LSM6DSL_ACC_GYRO_CTRL10_C 0x19
-
-
- #define LSM6DSL_ACC_GYRO_MASTER_CONFIG 0x1A
- #define LSM6DSL_ACC_GYRO_WAKE_UP_SRC 0x1B
- #define LSM6DSL_ACC_GYRO_TAP_SRC 0x1C
- #define LSM6DSL_ACC_GYRO_D6D_SRC 0x1D
- #define LSM6DSL_ACC_GYRO_STATUS_REG 0x1E
-
- #define LSM6DSL_ACC_GYRO_OUT_TEMP_L 0x20
- #define LSM6DSL_ACC_GYRO_OUT_TEMP_H 0x21
- #define LSM6DSL_ACC_GYRO_OUTX_L_G 0x22
- #define LSM6DSL_ACC_GYRO_OUTX_H_G 0x23
- #define LSM6DSL_ACC_GYRO_OUTY_L_G 0x24
- #define LSM6DSL_ACC_GYRO_OUTY_H_G 0x25
- #define LSM6DSL_ACC_GYRO_OUTZ_L_G 0x26
- #define LSM6DSL_ACC_GYRO_OUTZ_H_G 0x27
- #define LSM6DSL_ACC_GYRO_OUTX_L_XL 0x28
- #define LSM6DSL_ACC_GYRO_OUTX_H_XL 0x29
- #define LSM6DSL_ACC_GYRO_OUTY_L_XL 0x2A
- #define LSM6DSL_ACC_GYRO_OUTY_H_XL 0x2B
- #define LSM6DSL_ACC_GYRO_OUTZ_L_XL 0x2C
- #define LSM6DSL_ACC_GYRO_OUTZ_H_XL 0x2D
- #define LSM6DSL_ACC_GYRO_SENSORHUB1_REG 0x2E
- #define LSM6DSL_ACC_GYRO_SENSORHUB2_REG 0x2F
- #define LSM6DSL_ACC_GYRO_SENSORHUB3_REG 0x30
- #define LSM6DSL_ACC_GYRO_SENSORHUB4_REG 0x31
- #define LSM6DSL_ACC_GYRO_SENSORHUB5_REG 0x32
- #define LSM6DSL_ACC_GYRO_SENSORHUB6_REG 0x33
- #define LSM6DSL_ACC_GYRO_SENSORHUB7_REG 0x34
- #define LSM6DSL_ACC_GYRO_SENSORHUB8_REG 0x35
- #define LSM6DSL_ACC_GYRO_SENSORHUB9_REG 0x36
- #define LSM6DSL_ACC_GYRO_SENSORHUB10_REG 0x37
- #define LSM6DSL_ACC_GYRO_SENSORHUB11_REG 0x38
- #define LSM6DSL_ACC_GYRO_SENSORHUB12_REG 0x39
- #define LSM6DSL_ACC_GYRO_FIFO_STATUS1 0x3A
- #define LSM6DSL_ACC_GYRO_FIFO_STATUS2 0x3B
- #define LSM6DSL_ACC_GYRO_FIFO_STATUS3 0x3C
- #define LSM6DSL_ACC_GYRO_FIFO_STATUS4 0x3D
- #define LSM6DSL_ACC_GYRO_FIFO_DATA_OUT_L 0x3E
- #define LSM6DSL_ACC_GYRO_FIFO_DATA_OUT_H 0x3F
- #define LSM6DSL_ACC_GYRO_TIMESTAMP0_REG 0x40
- #define LSM6DSL_ACC_GYRO_TIMESTAMP1_REG 0x41
- #define LSM6DSL_ACC_GYRO_TIMESTAMP2_REG 0x42
-
- #define LSM6DSL_ACC_GYRO_TIMESTAMP_L 0x49
- #define LSM6DSL_ACC_GYRO_TIMESTAMP_H 0x4A
-
- #define LSM6DSL_ACC_GYRO_STEP_COUNTER_L 0x4B
- #define LSM6DSL_ACC_GYRO_STEP_COUNTER_H 0x4C
-
- #define LSM6DSL_ACC_GYRO_SENSORHUB13_REG 0x4D
- #define LSM6DSL_ACC_GYRO_SENSORHUB14_REG 0x4E
- #define LSM6DSL_ACC_GYRO_SENSORHUB15_REG 0x4F
- #define LSM6DSL_ACC_GYRO_SENSORHUB16_REG 0x50
- #define LSM6DSL_ACC_GYRO_SENSORHUB17_REG 0x51
- #define LSM6DSL_ACC_GYRO_SENSORHUB18_REG 0x52
-
- #define LSM6DSL_ACC_GYRO_FUNC_SRC 0x53
- #define LSM6DSL_ACC_GYRO_TAP_CFG1 0x58
- #define LSM6DSL_ACC_GYRO_TAP_THS_6D 0x59
- #define LSM6DSL_ACC_GYRO_INT_DUR2 0x5A
- #define LSM6DSL_ACC_GYRO_WAKE_UP_THS 0x5B
- #define LSM6DSL_ACC_GYRO_WAKE_UP_DUR 0x5C
- #define LSM6DSL_ACC_GYRO_FREE_FALL 0x5D
- #define LSM6DSL_ACC_GYRO_MD1_CFG 0x5E
- #define LSM6DSL_ACC_GYRO_MD2_CFG 0x5F
-
- #define LSM6DSL_ACC_GYRO_OUT_MAG_RAW_X_L 0x66
- #define LSM6DSL_ACC_GYRO_OUT_MAG_RAW_X_H 0x67
- #define LSM6DSL_ACC_GYRO_OUT_MAG_RAW_Y_L 0x68
- #define LSM6DSL_ACC_GYRO_OUT_MAG_RAW_Y_H 0x69
- #define LSM6DSL_ACC_GYRO_OUT_MAG_RAW_Z_L 0x6A
- #define LSM6DSL_ACC_GYRO_OUT_MAG_RAW_Z_H 0x6B
-
- #define LSM6DSL_ACC_GYRO_X_OFS_USR 0x73
- #define LSM6DSL_ACC_GYRO_Y_OFS_USR 0x74
- #define LSM6DSL_ACC_GYRO_Z_OFS_USR 0x75
-
- #define LSM6DSL_CHIP_ID_VALUE (0x6A)
-
- #define LSM6DSL_RESET_VALUE (0x1)
- #define LSM6DSL_RESET_MSK (0X1)
- #define LSM6DSL_RESET_POS (0)
-
- #define LSM6DSL_ACC_ODR_POWER_DOWN (0X00)
- #define LSM6DSL_ACC_ODR_1_6_HZ (0X0B)
- #define LSM6DSL_ACC_ODR_12_5_HZ (0x01)
- #define LSM6DSL_ACC_ODR_26_HZ (0x02)
- #define LSM6DSL_ACC_ODR_52_HZ (0x03)
- #define LSM6DSL_ACC_ODR_104_HZ (0x04)
- #define LSM6DSL_ACC_ODR_208_HZ (0x05)
- #define LSM6DSL_ACC_ODR_416_HZ (0x06)
- #define LSM6DSL_ACC_ODR_833_HZ (0x07)
- #define LSM6DSL_ACC_ODR_1_66_KHZ (0x08)
- #define LSM6DSL_ACC_ODR_3_33_KHZ (0x09)
- #define LSM6DSL_ACC_ODR_6_66_KHZ (0x0A)
- #define LSM6DSL_ACC_ODR_MSK (0XF0)
- #define LSM6DSL_ACC_ODR_POS (4)
-
- #define LSM6DSL_GYRO_ODR_POWER_DOWN (0X00)
- #define LSM6DSL_GYRO_ODR_12_5_HZ (0x01)
- #define LSM6DSL_GYRO_ODR_26_HZ (0x02)
- #define LSM6DSL_GYRO_ODR_52_HZ (0x03)
- #define LSM6DSL_GYRO_ODR_104_HZ (0x04)
- #define LSM6DSL_GYRO_ODR_208_HZ (0x05)
- #define LSM6DSL_GYRO_ODR_416_HZ (0x06)
- #define LSM6DSL_GYRO_ODR_833_HZ (0x07)
- #define LSM6DSL_GYRO_ODR_1_66_KHZ (0x08)
- #define LSM6DSL_GYRO_ODR_3_33_KHZ (0x09)
- #define LSM6DSL_GYRO_ODR_6_66_KHZ (0x0A)
- #define LSM6DSL_GYRO_ODR_MSK (0XF0)
- #define LSM6DSL_GYRO_ODR_POS (4)
-
- #define LSM6DSL_ACC_RANGE_2G (0x0)
- #define LSM6DSL_ACC_RANGE_4G (0x2)
- #define LSM6DSL_ACC_RANGE_8G (0x3)
- #define LSM6DSL_ACC_RANGE_16G (0x1)
- #define LSM6DSL_ACC_RANGE_MSK (0X0C)
- #define LSM6DSL_ACC_RANGE_POS (2)
-
- #define LSM6DSL_ACC_SENSITIVITY_2G (61)
- #define LSM6DSL_ACC_SENSITIVITY_4G (122)
- #define LSM6DSL_ACC_SENSITIVITY_8G (244)
- #define LSM6DSL_ACC_SENSITIVITY_16G (488)
-
- #define LSM6DSL_GYRO_RANGE_245 (0x0)
- #define LSM6DSL_GYRO_RANGE_500 (0x1)
- #define LSM6DSL_GYRO_RANGE_1000 (0x2)
- #define LSM6DSL_GYRO_RANGE_2000 (0x3)
- #define LSM6DSL_GYRO_RANGE_MSK (0X0C)
- #define LSM6DSL_GYRO_RANGE_POS (2)
-
- #define LSM6DSL_GYRO_SENSITIVITY_245DPS (8750)
- #define LSM6DSL_GYRO_SENSITIVITY_500DPS (17500)
- #define LSM6DSL_GYRO_SENSITIVITY_1000DPS (35000)
- #define LSM6DSL_GYRO_SENSITIVITY_2000DPS (70000)
-
- #define LSM6DSL_SHIFT_EIGHT_BITS (8)
- #define LSM6DSL_16_BIT_SHIFT (0xFF)
- #define LSM6DSL_ACC_MUL (1000)
- #define LSM6DSL_GYRO_MUL (1)
-
- #define LSM6DSL_ACC_DEFAULT_ODR_100HZ (100)
- #define LSM6DSL_GYRO_DEFAULT_ODR_100HZ (100)
-
- #define LSM6DSL_GET_BITSLICE(regvar, bitname) \
- ((regvar & bitname##_MSK) >> bitname##_POS)
-
- #define LSM6DSL_SET_BITSLICE(regvar, bitname, val) \
- ((regvar & ~bitname##_MSK) | ((val << bitname##_POS) & bitname##_MSK))
-
- typedef enum {
- ACC_RANGE_2G,
- ACC_RANGE_4G,
- ACC_RANGE_8G,
- ACC_RANGE_16G,
- ACC_RANGE_6G,
- ACC_RANGE_12G,
- ACC_RANGE_24G,
- ACC_RANGE_100G,
- ACC_RANGE_200G,
- ACC_RANGE_400G,
- ACC_RANGE_MAX
- } acc_range_e;
-
- typedef enum {
- GYRO_RANGE_125DPS,
- GYRO_RANGE_250DPS,
- GYRO_RANGE_500DPS,
- GYRO_RANGE_1000DPS,
- GYRO_RANGE_2000DPS,
- GYRO_RANGE_MAX
- } gyro_range_e;
-
- static int32_t lsm6dsl_acc_factor[ACC_RANGE_MAX] = {
- LSM6DSL_ACC_SENSITIVITY_2G, LSM6DSL_ACC_SENSITIVITY_4G,
- LSM6DSL_ACC_SENSITIVITY_8G, LSM6DSL_ACC_SENSITIVITY_16G
- };
- static int32_t lsm6dsl_gyro_factor[GYRO_RANGE_MAX] = {
- 0, LSM6DSL_GYRO_SENSITIVITY_245DPS, LSM6DSL_GYRO_SENSITIVITY_500DPS,
- LSM6DSL_GYRO_SENSITIVITY_1000DPS, LSM6DSL_GYRO_SENSITIVITY_2000DPS
- };
-
- typedef enum {
- DEV_POWER_OFF = 0,
- DEV_POWER_ON,
- DEV_SLEEP,
- DEV_SUSPEND,
- DEV_DEEP_SUSPEND,
- } LSM6DSL_power_mode;
-
- static int32_t cur_acc_factor = 0;
- static int32_t cur_gyro_factor = 0;
-
- uint8_t LSM6DSL_ID_check()
- {
- HAL_StatusTypeDef hi2c2_status = 0x00;
- uint8_t addr_val[3] = {LSM6DSL_ACC_GYRO_WHO_AM_I_REG,0x00,LSM6DSL_CHIP_ID_VALUE};
- hi2c2_status = HAL_I2C_Mem_Read(&hi2c4,LSM6DSL_I2C_ADDR,addr_val[0],1,&addr_val[1],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("get LSM6DSL ID error\r\n");
- return 1;
- }
- if(addr_val[1]!=addr_val[2]){
- printf("LSM6DSL validate_id is error\r\n");
- return 1;
- }
- printf("LSM6DSL_id:%02X\r\n",addr_val[1]);
- return 0;
- }
-
- uint8_t LSM6DSL_soft_reset()
- {
- HAL_StatusTypeDef hi2c2_status = 0x00;
- /*first read*/
- uint8_t addr_val[2] = {LSM6DSL_ACC_GYRO_CTRL3_C,0x00};
- hi2c2_status = HAL_I2C_Mem_Read(&hi2c4,LSM6DSL_I2C_ADDR,addr_val[0],1,&addr_val[1],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("get LSM6DSL ACC_GYRO_CTRL3_C error\r\n");
- return 1;
- }
- printf("LSM6DSL ACC_GYRO_CTRL3_C old:%02X\r\n",addr_val[1]);
- addr_val[1] |= LSM6DSL_RESET_VALUE;
- printf("LSM6DSL ACC_GYRO_CTRL3_C new:%02X\r\n",addr_val[1]);
- hi2c2_status = HAL_I2C_Mem_Write(&hi2c4,LSM6DSL_I2C_ADDR,addr_val[0],1,&addr_val[1],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("set LSM6DSL ACC_GYRO_CTRL3_C error\r\n");
- return 1;
- }
- printf("successfully LSM6DSL soft reset\r\n");
- return 0;
- }
- /*
- * 以正数为例,最大可到32767,如果是Accelerometer数据,量程为2g的情况下,
- * 32768个刻度,一个刻度代表:2g/32768 = 2000mg/32767 = 0.061035mg
- * 例如:如果读出数据为16384,则加速度:16384x0.061035mg = 1000mg = 1g
- */
- uint8_t LSM6DSL_acc_set_range(uint32_t range)
- {
- HAL_StatusTypeDef hi2c2_status = 0x00;
- /*first read*/
- uint8_t addr_val[2] = {LSM6DSL_ACC_GYRO_CTRL1_XL,0x00};
- hi2c2_status = HAL_I2C_Mem_Read(&hi2c4,LSM6DSL_I2C_ADDR,addr_val[0],1,&addr_val[1],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("get LSM6DSL acc range error\r\n");
- return 1;
- }
- uint8_t tmp = 0;
- switch (range) {
- case ACC_RANGE_2G: {
- tmp = LSM6DSL_ACC_RANGE_2G;
- } break;
-
- case ACC_RANGE_4G: {
- tmp = LSM6DSL_ACC_RANGE_4G;
- } break;
-
- case ACC_RANGE_8G: {
- tmp = LSM6DSL_ACC_RANGE_8G;
- } break;
-
- case ACC_RANGE_16G: {
- tmp = LSM6DSL_ACC_RANGE_16G;
- } break;
-
- default:
- break;
- }
- addr_val[1] = LSM6DSL_SET_BITSLICE(addr_val[1], LSM6DSL_ACC_RANGE, tmp);
- hi2c2_status = HAL_I2C_Mem_Write(&hi2c4,LSM6DSL_I2C_ADDR,addr_val[0],1,&addr_val[1],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("set LSM6DSL acc range error\r\n");
- return 1;
- }
- if (range <= ACC_RANGE_16G) {
- cur_acc_factor = lsm6dsl_acc_factor[range];
- }
- printf("successfully LSM6DSL set acc range\r\n");
- return 0;
- }
-
- static uint8_t acc_st_lsm6dsl_hz2odr(uint32_t hz)
- {
- if (hz > 3330)
- return LSM6DSL_ACC_ODR_6_66_KHZ;
- else if (hz > 1660)
- return LSM6DSL_ACC_ODR_3_33_KHZ;
- else if (hz > 833)
- return LSM6DSL_ACC_ODR_1_66_KHZ;
- else if (hz > 416)
- return LSM6DSL_ACC_ODR_833_HZ;
- else if (hz > 208)
- return LSM6DSL_ACC_ODR_416_HZ;
- else if (hz > 104)
- return LSM6DSL_ACC_ODR_208_HZ;
- else if (hz > 52)
- return LSM6DSL_ACC_ODR_104_HZ;
- else if (hz > 26)
- return LSM6DSL_ACC_ODR_52_HZ;
- else if (hz > 13)
- return LSM6DSL_ACC_ODR_26_HZ;
- else if (hz >= 2)
- return LSM6DSL_ACC_ODR_12_5_HZ;
- else
- return LSM6DSL_ACC_ODR_1_6_HZ;
- }
-
- uint8_t LSM6DSL_acc_set_odr(uint32_t hz)
- {
- HAL_StatusTypeDef hi2c2_status = 0x00;
- /*first read*/
- uint8_t addr_val[2] = {LSM6DSL_ACC_GYRO_CTRL1_XL,0x00};
- hi2c2_status = HAL_I2C_Mem_Read(&hi2c4,LSM6DSL_I2C_ADDR,addr_val[0],1,&addr_val[1],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("get LSM6DSL acc odr error\r\n");
- return 1;
- }
- uint8_t odr = acc_st_lsm6dsl_hz2odr(hz);
- addr_val[1] = LSM6DSL_SET_BITSLICE(addr_val[1], LSM6DSL_ACC_ODR, odr);
- hi2c2_status = HAL_I2C_Mem_Write(&hi2c4,LSM6DSL_I2C_ADDR,addr_val[0],1,&addr_val[1],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("set LSM6DSL acc odr error\r\n");
- return 1;
- }
- printf("successfully LSM6DSL set acc odr\r\n");
- return 0;
- }
-
- uint8_t LSM6DSL_acc_power_mode(LSM6DSL_power_mode mode)
- {
- HAL_StatusTypeDef hi2c2_status = 0x00;
- /*first read*/
- uint8_t addr_val[2] = {LSM6DSL_ACC_GYRO_CTRL1_XL,0x00};
- hi2c2_status = HAL_I2C_Mem_Read(&hi2c4,LSM6DSL_I2C_ADDR,addr_val[0],1,&addr_val[1],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("get LSM6DSL acc power_mode error\r\n");
- return 1;
- }
- switch (mode) {
- case DEV_POWER_ON: {
- addr_val[1] = LSM6DSL_SET_BITSLICE(addr_val[1], LSM6DSL_ACC_ODR,LSM6DSL_ACC_ODR_12_5_HZ);
- }
- break;
- case DEV_POWER_OFF: {
- addr_val[1] = LSM6DSL_SET_BITSLICE(addr_val[1], LSM6DSL_ACC_ODR,LSM6DSL_ACC_ODR_POWER_DOWN);
- }
- break;
- case DEV_SLEEP: {
- addr_val[1] = LSM6DSL_SET_BITSLICE(addr_val[1], LSM6DSL_ACC_ODR,LSM6DSL_ACC_ODR_12_5_HZ);
- }
- break;
- default:
- break;
- }
- hi2c2_status = HAL_I2C_Mem_Write(&hi2c4,LSM6DSL_I2C_ADDR,addr_val[0],1,&addr_val[1],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("set LSM6DSL acc power_mode error\r\n");
- return 1;
- }
- printf("successfully LSM6DSL acc power_mode\r\n");
- return 0;
- }
-
- uint8_t LSM6DSL_acc_st_open(void)
- {
- uint8_t ret = 0;
-
- ret = LSM6DSL_acc_power_mode( DEV_POWER_ON);
- if (ret>0) {
- return ret;
- }
-
- ret = LSM6DSL_acc_set_range(ACC_RANGE_8G);
- if (ret>0) {
- return ret;
- }
-
- ret = LSM6DSL_acc_set_odr(LSM6DSL_ACC_DEFAULT_ODR_100HZ);
- if (ret>0) {
- return ret;
- }
- printf("successfully LSM6DSL acc open\r\n");
- return 0;
- }
-
- uint8_t LSM6DSL_acc_st_close(void)
- {
- uint8_t ret = 0;
- ret = LSM6DSL_acc_power_mode(DEV_POWER_OFF);
- if (ret>0) {
- return ret;
- }
- printf("successfully LSM6DSL acc close\r\n");
- return 0;
- }
-
- //LSM6DSL的满刻度加速度范围为±2/±4/±8/±16 g,角速度范围为±125/±250/±500/±1000/±2000 dps。
- uint8_t LSM6DSL_gyro_set_range(uint32_t range)
- {
- HAL_StatusTypeDef hi2c2_status = 0x00;
- /*first read*/
- uint8_t addr_val[2] = {LSM6DSL_ACC_GYRO_CTRL2_G,0x00};
- hi2c2_status = HAL_I2C_Mem_Read(&hi2c4,LSM6DSL_I2C_ADDR,addr_val[0],1,&addr_val[1],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("get LSM6DSL gyro range error\r\n");
- return 1;
- }
- uint8_t tmp = 0;
- switch (range) {
- case GYRO_RANGE_250DPS: {
- tmp = LSM6DSL_GYRO_RANGE_245;
- } break;
-
- case GYRO_RANGE_500DPS: {
- tmp = LSM6DSL_GYRO_RANGE_500;
- } break;
-
- case GYRO_RANGE_1000DPS: {
- tmp = LSM6DSL_GYRO_RANGE_1000;
- } break;
-
- case GYRO_RANGE_2000DPS: {
- tmp = LSM6DSL_GYRO_RANGE_2000;
- } break;
-
- default:
- break;
- }
- addr_val[1] = LSM6DSL_SET_BITSLICE(addr_val[1], LSM6DSL_GYRO_RANGE, tmp);
- hi2c2_status = HAL_I2C_Mem_Write(&hi2c4,LSM6DSL_I2C_ADDR,addr_val[0],1,&addr_val[1],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("set LSM6DSL gyro range error\r\n");
- return 1;
- }
- if ((range >= GYRO_RANGE_250DPS) && (range <= GYRO_RANGE_2000DPS)) {
- cur_gyro_factor = lsm6dsl_gyro_factor[range];
- }
- printf("successfully LSM6DSL set gyro range\r\n");
- return 0;
- }
-
- static uint8_t gyro_st_lsm6dsl_hz2odr(uint32_t hz)
- {
- if (hz > 3330)
- return LSM6DSL_GYRO_ODR_6_66_KHZ;
- else if (hz > 1660)
- return LSM6DSL_GYRO_ODR_3_33_KHZ;
- else if (hz > 833)
- return LSM6DSL_GYRO_ODR_1_66_KHZ;
- else if (hz > 416)
- return LSM6DSL_GYRO_ODR_833_HZ;
- else if (hz > 208)
- return LSM6DSL_GYRO_ODR_416_HZ;
- else if (hz > 104)
- return LSM6DSL_GYRO_ODR_208_HZ;
- else if (hz > 52)
- return LSM6DSL_GYRO_ODR_104_HZ;
- else if (hz > 26)
- return LSM6DSL_GYRO_ODR_52_HZ;
- else if (hz > 13)
- return LSM6DSL_GYRO_ODR_26_HZ;
- else
- return LSM6DSL_GYRO_ODR_12_5_HZ;
- }
-
- uint8_t LSM6DSL_gyro_set_odr(uint32_t hz)
- {
- HAL_StatusTypeDef hi2c2_status = 0x00;
- /*first read*/
- uint8_t addr_val[2] = {LSM6DSL_ACC_GYRO_CTRL2_G,0x00};
- hi2c2_status = HAL_I2C_Mem_Read(&hi2c4,LSM6DSL_I2C_ADDR,addr_val[0],1,&addr_val[1],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("get LSM6DSL gyro odr error\r\n");
- return 1;
- }
- uint8_t odr = gyro_st_lsm6dsl_hz2odr(hz);
- addr_val[1] = LSM6DSL_SET_BITSLICE(addr_val[1], LSM6DSL_GYRO_ODR, odr);
- hi2c2_status = HAL_I2C_Mem_Write(&hi2c4,LSM6DSL_I2C_ADDR,addr_val[0],1,&addr_val[1],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("set LSM6DSL gyro odr error\r\n");
- return 1;
- }
- printf("successfully LSM6DSL set gyro odr\r\n");
- return 0;
- }
-
- uint8_t LSM6DSL_gyro_power_mode(LSM6DSL_power_mode mode)
- {
- HAL_StatusTypeDef hi2c2_status = 0x00;
- /*first read*/
- uint8_t addr_val[2] = {LSM6DSL_ACC_GYRO_CTRL2_G,0x00};
- hi2c2_status = HAL_I2C_Mem_Read(&hi2c4,LSM6DSL_I2C_ADDR,addr_val[0],1,&addr_val[1],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("get LSM6DSL gyro power_mode error\r\n");
- return 1;
- }
- switch (mode) {
- case DEV_POWER_ON: {
- addr_val[1] = LSM6DSL_SET_BITSLICE(addr_val[1], LSM6DSL_GYRO_ODR,LSM6DSL_GYRO_ODR_12_5_HZ);
- break;
- }
- case DEV_POWER_OFF: {
- addr_val[1] = LSM6DSL_SET_BITSLICE(addr_val[1], LSM6DSL_GYRO_ODR,LSM6DSL_GYRO_ODR_POWER_DOWN);
- break;
- }
- case DEV_SLEEP: {
- addr_val[1] = LSM6DSL_SET_BITSLICE(addr_val[1], LSM6DSL_GYRO_ODR,LSM6DSL_GYRO_ODR_12_5_HZ);
- break;
- }
- default:
- break;
- }
- hi2c2_status = HAL_I2C_Mem_Write(&hi2c4,LSM6DSL_I2C_ADDR,addr_val[0],1,&addr_val[1],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("set LSM6DSL gyro power_mode error\r\n");
- return 1;
- }
- printf("successfully LSM6DSL gyro power_mode\r\n");
- return 0;
- }
-
- uint8_t LSM6DSL_gyro_st_open(void)
- {
- uint8_t ret = 0;
- ret = LSM6DSL_gyro_power_mode(DEV_POWER_ON);
- if (ret>0) {
- return 1;
- }
-
- ret = LSM6DSL_gyro_set_range(GYRO_RANGE_1000DPS);
- if (ret>0) {
- return 1;
- }
-
- ret = LSM6DSL_gyro_set_odr(LSM6DSL_GYRO_DEFAULT_ODR_100HZ);
- if (ret>0) {
- return 1;
- }
- printf("successfully LSM6DSL gyro open\r\n");
- return 0;
- }
-
- uint8_t LSM6DSL_gyro_st_close(void)
- {
- uint8_t ret = 0;
- ret = LSM6DSL_gyro_power_mode(DEV_POWER_OFF);
- if (ret>0) {
- return 1;
- }
- printf("successfully LSM6DSL gyro close\r\n");
- return 0;
- }
-
- void LSM6DSL_init()
- {
- if(LSM6DSL_ID_check()>0)
- return;
- if(LSM6DSL_soft_reset()>0)
- return;
- if(LSM6DSL_acc_power_mode(DEV_POWER_OFF)>0)
- return;
- if(LSM6DSL_gyro_power_mode(DEV_POWER_OFF)>0)
- return;
- printf("successfully LSM6DSL init\r\n");
- }
-
- #define DATA_AXIS_X 0
- #define DATA_AXIS_Y 1
- #define DATA_AXIS_Z 2
-
- uint8_t LSM6DSL_acc_read(int32_t *x_data,int32_t *y_data,int32_t *z_data)
- {
- HAL_StatusTypeDef hi2c2_status = 0x00;
- /*read 0X28,0X29,0X2A,0X2B,0X2C,0X2D*/
- uint8_t addr[6] = {LSM6DSL_ACC_GYRO_OUTX_L_XL,LSM6DSL_ACC_GYRO_OUTX_H_XL,
- LSM6DSL_ACC_GYRO_OUTY_L_XL,LSM6DSL_ACC_GYRO_OUTY_H_XL,
- LSM6DSL_ACC_GYRO_OUTZ_L_XL,LSM6DSL_ACC_GYRO_OUTZ_H_XL};
- uint8_t val[6] = {0};
- for(uint8_t i=0; i<6; i++){
- hi2c2_status = HAL_I2C_Mem_Read(&hi2c4,LSM6DSL_I2C_ADDR,addr[i],1,&val[i],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("get LSM6DSL acc_read[0X%02X] error\r\n",addr[i]);
- return 1;
- }
- }
- // printf("read acc reg_data 1:%02X, 2:%02X, 3:%02X, 4:%02X, 5:%02X ,6:%02X\r\n"
- // ,val[0],val[1],val[2],val[3],val[4],val[5]);
- int32_t data[3] = {0};
- data[DATA_AXIS_X] = (int16_t)((((int16_t)((int8_t)val[1])) << LSM6DSL_SHIFT_EIGHT_BITS) | (val[0]));
- data[DATA_AXIS_Y] = (int16_t)((((int16_t)((int8_t)val[3])) << LSM6DSL_SHIFT_EIGHT_BITS) | (val[2]));
- data[DATA_AXIS_Z] = (int16_t)((((int16_t)((int8_t)val[5])) << LSM6DSL_SHIFT_EIGHT_BITS) | (val[4]));
- if (cur_acc_factor != 0)
- {
- data[DATA_AXIS_X] = (data[DATA_AXIS_X] * cur_acc_factor) / LSM6DSL_ACC_MUL;
- data[DATA_AXIS_Y] = (data[DATA_AXIS_Y] * cur_acc_factor) / LSM6DSL_ACC_MUL;
- data[DATA_AXIS_Z] = (data[DATA_AXIS_Z] * cur_acc_factor) / LSM6DSL_ACC_MUL;
- }
- // printf("read acc cur_acc_factor:%ld, X:%ld,Y:%ld,Z:%ld\r\n"
- // ,cur_acc_factor,data[0],data[1],data[2]);
- *x_data = data[DATA_AXIS_X];
- *y_data = data[DATA_AXIS_Y];
- *z_data = data[DATA_AXIS_Z];
- return 0;
- }
-
- uint8_t LSM6DSL_gyro_read(int32_t *x_data,int32_t *y_data,int32_t *z_data)
- {
- HAL_StatusTypeDef hi2c2_status = 0x00;
- /*read 0X22,0X23,0X24,0X25,0X26,0X27*/
- uint8_t addr[6] = {LSM6DSL_ACC_GYRO_OUTX_L_G,LSM6DSL_ACC_GYRO_OUTX_H_G,
- LSM6DSL_ACC_GYRO_OUTY_L_G,LSM6DSL_ACC_GYRO_OUTY_H_G,
- LSM6DSL_ACC_GYRO_OUTZ_L_G,LSM6DSL_ACC_GYRO_OUTZ_H_G};
- uint8_t val[6] = {0};
- for(uint8_t i=0; i<6; i++){
- hi2c2_status = HAL_I2C_Mem_Read(&hi2c4,LSM6DSL_I2C_ADDR,addr[i],1,&val[i],1,1000);
- if(HAL_OK!=hi2c2_status){
- printf("get LSM6DSL gyro_read[0X%02X] error\r\n",addr[i]);
- return 1;
- }
- }
- // printf("read gyro reg_data 1:%02X, 2:%02X, 3:%02X, 4:%02X, 5:%02X ,6:%02X\r\n"
- // ,val[0],val[1],val[2],val[3],val[4],val[5]);
- int32_t data[3] = {0};
- data[DATA_AXIS_X] = (int16_t)((((int32_t)((int8_t)val[1])) << LSM6DSL_SHIFT_EIGHT_BITS) | (val[0]));
- data[DATA_AXIS_Y] = (int16_t)((((int32_t)((int8_t)val[3])) << LSM6DSL_SHIFT_EIGHT_BITS) | (val[2]));
- data[DATA_AXIS_Z] = (int16_t)((((int32_t)((int8_t)val[5])) << LSM6DSL_SHIFT_EIGHT_BITS) | (val[4]));
-
- if (cur_gyro_factor != 0) {
- data[DATA_AXIS_X] = (data[DATA_AXIS_X] * cur_gyro_factor) / LSM6DSL_GYRO_MUL;
- data[DATA_AXIS_Y] = (data[DATA_AXIS_Y] * cur_gyro_factor) / LSM6DSL_GYRO_MUL;
- data[DATA_AXIS_Z] = (data[DATA_AXIS_Z] * cur_gyro_factor) / LSM6DSL_GYRO_MUL;
- }
- // printf("read gyro cur_gyro_factor:%ld, X:%ld,Y:%ld,Z:%ld\r\n"
- // ,cur_gyro_factor,data[0],data[1],data[2]);
- *x_data = data[DATA_AXIS_X];
- *y_data = data[DATA_AXIS_Y];
- *z_data = data[DATA_AXIS_Z];
- return 0;
- }
2.3 传感器数据采集与输出源码设计
在main.c文件中,添加各个外设驱动头文件支持
- /* Private includes ----------------------------------------------------------*/
- /* USER CODE BEGIN Includes */
- #include "../../ICore/key/key.h"
- #include "../../ICore/led/led.h"
- #include "../../ICore/print/print.h"
- #include "../../ICore/usart/usart.h"
- #include "../../ICore/LSM6DSL/LSM6DSL.h"
- /* USER CODE END Includes */
打印实时采集的三轴加速度信息
- /* Private user code ---------------------------------------------------------*/
- /* USER CODE BEGIN 0 */
- void out_print(int32_t acc_x, int32_t acc_y, int32_t acc_z)
- {
- if(acc_x>0)
- printf("%d.%d, ",(acc_x*98)/10000,((acc_x*98)%10000)/100);
- else
- printf("%d.%d, ",(acc_x*98)/10000,((-acc_x*98)%10000)/100);
- if(acc_y>0)
- printf("%d.%d, ",(acc_y*98)/10000,((acc_y*98)%10000)/100);
- else
- printf("%d.%d, ",(acc_y*98)/10000,((-acc_y*98)%10000)/100);
- if(acc_z>0)
- printf("%d.%d, ",(acc_z*98)/10000,((acc_z*98)%10000)/100);
- else
- printf("%d.%d, ",(acc_z*98)/10000,((-acc_z*98)%10000)/100);
- }
- /* USER CODE END 0 */
在main函数中,初始化各个外设
- int main(void)
- {
- /* USER CODE BEGIN 1 */
- int32_t acc_x,acc_y,acc_z;
- /* USER CODE END 1 */
-
- /* MCU Configuration--------------------------------------------------------*/
-
- /* Reset of all peripherals, Initializes the Flash interface and the Systick. */
- HAL_Init();
-
- /* USER CODE BEGIN Init */
-
- /* USER CODE END Init */
-
- /* Configure the system clock */
- SystemClock_Config();
-
- /* USER CODE BEGIN SysInit */
-
- /* USER CODE END SysInit */
-
- /* Initialize all configured peripherals */
- MX_GPIO_Init();
- MX_DMA_Init();
- MX_I2C4_Init();
- MX_LPUART1_UART_Init();
- /* USER CODE BEGIN 2 */
- ResetPrintInit(&hlpuart1);
- HAL_UART_Receive_IT(&hlpuart1,(uint8_t *)&HLPUSART_NewData, 1); //再开启接收中断
- HLPUSART_RX_STA = 0;
- //LSM6DSL
- LSM6DSL_init();
- LSM6DSL_acc_st_open();
- acc_x = acc_y = acc_z = 0;
- uint8_t menu = 0;
- uint8_t step_size = 3;
- /* USER CODE END 2 */
在main函数循环体内,实现根据按键采集传感器数据(开发板正面朝上):
1)保持开发板在桌面不动,按键KEY0按下时,采集静止不动姿态时的三轴加速度,并每采集三次,输出一次姿态结果[1,0,0],再次按下KEY0时停止采集
2)保持开发板在桌面左右移动,按键KEY1按下时,采集左右移动姿态时的三轴加速度,并每采集三次,输出一次姿态结果[0,1,0],再次按下KEY1时停止采集
3)保持开发板在桌面上上下移动(垂直方向),按键KEY2按下时,采集左右移动姿态时的三轴加速度,并每采集三次,输出一次姿态结果[0,0,1],再次按下KEY2时停止采集
- /* USER CODE BEGIN WHILE */
- while (1)
- {
- if(HLPUSART_RX_STA&0xC000){//溢出或换行,重新开始
- printf("%.*s\r\n",HLPUSART_RX_STA&0X0FFF, HLPUSART_RX_BUF);
- HLPUSART_RX_STA=0;//接收错误,重新开始
- HAL_Delay(100);//等待
- }
- if(KEY_0())
- {
- if(menu&0x01)
- menu &= 0XFE; //取消静止不动数据刷新
- else{
- menu |= 0X01; //开启静止不动数据刷新
- }
- menu &= 0XF9; //取消其他数据刷新
- }
- if(KEY_1())
- {
- if(menu&0x02)
- menu &= 0XFD; //取消左右移动数据刷新
- else{
- menu |= 0X02; //开启左右移动数据刷新
- }
- menu &= 0XFA; //取消其他数据刷新
-
- }
- if(KEY_2())
- {
- if(menu&0x04)
- menu &= 0XFB; //取消上下移动数据刷新
- else{
- menu |= 0X04; //开启上下移动数据刷新
- }
- menu &= 0XFC; //取消其他数据刷新
-
- }
- if(menu&0x01)//静止不动
- {
- for(uint8_t i =0; i<step_size;i++){
- LSM6DSL_acc_read(&acc_x,&acc_y,&acc_z);
- out_print(acc_x,acc_y,acc_z);
- HAL_Delay(100);//等待
- }
- printf("1, 0, 0\r\n");
- Toggle_led0();
- }
- if(menu&0x02)//左右移动
- {
- for(uint8_t i =0; i<step_size;i++){
- LSM6DSL_acc_read(&acc_x,&acc_y,&acc_z);
- out_print(acc_x,acc_y,acc_z);
- HAL_Delay(100);//等待
- }
- printf("0, 1, 0\r\n");
- Toggle_led1();
- }
- if(menu&0x04)//上下移动
- {
- for(uint8_t i =0; i<step_size;i++){
- LSM6DSL_acc_read(&acc_x,&acc_y,&acc_z);
- out_print(acc_x,acc_y,acc_z);
- HAL_Delay(100);//等待
- }
- printf("0, 0, 1\r\n");
- Toggle_led2();
- }
- /* USER CODE END WHILE */
2.4 编辑下载程序,采集数据
编译程序及加载到开发板

打开串口助手,连接开发板,先清空屏幕,然后按上述功能操作进行数据采集,每种姿态采集大概一分钟的数据,完成后保存数据。

创建目录My_HAR_Study,将保存的txt文件拷贝到该目录,并将该文件修改为.csv后缀

三、模型训练
在该目录下,创建myrun.py文件,内容如下:
- #模型训练文件 myrun.py 训练 epochs 1000次
- # myrun.py
- '''
- 开发板(正面朝上)姿态检测
- 静止不动、左右移动、上下移动
-
- 输入层 -> 隐藏层 -> 输出层
- '''
-
- # 导入工具包
- import pandas as pd
- import numpy as np
- from keras.models import Sequential
- from keras.layers import Dense, Dropout
- from keras.optimizers import SGD
-
- # %% 读取数据
- data = pd.read_csv('SaveWindows2023_1_28_16-31-14.csv', sep=',', header=None)
- data_x = data.loc[:, 0:8] # 取1~9列所有数据
- data_y = data.loc[:, 9:11]
- data_y.astype(int)
- #
- print("-x-")
- print(data_x[0:2])
- print("-y-")
- print(data_y[0:2])
-
- # %% 建立模型
- model = Sequential()
- # Dense(64) 是一个具有 64 个隐藏神经元的全连接层。
- # 在第一层必须指定所期望的输入数据尺寸:
- # 在这里,是一个 9 维的向量。
- model.add(Dense(64, activation='relu', input_dim=9))
- model.add(Dense(32, activation='relu'))
- model.add(Dense(3, activation='softmax'))
-
- sgd = SGD(lr=0.01, decay=1e-6, momentum=0.9, nesterov=True)
- model.compile(loss='categorical_crossentropy',
- optimizer=sgd,
- metrics=['accuracy'])
-
- model.fit(data_x, data_y,
- epochs=1000,
- batch_size=72)
- score = model.evaluate(data_x, data_y, batch_size=72)
-
- # 保存模型
- model.save('myhar.h5')
当前目录启动命令行工具,运行python3 .\myrun.py命令,


四、cube.AI配置及c模型生成
回到数据采集工程(stm32L496VGT6_AI),双击.ioc打开cubeMX配置页面。

添加my_har模型,选择刚刚生成的keras模型文件(.h5),注意值生成模型,不需要应用程序。

分析结果显示,模型精度很差,意料之中,毕竟神经网络层只进行了简单设计,实现不了那么复杂姿态识别,但验证模型没有错误,支持转换,可以用来演示完开发流程就OK。

根据分析稍微调整一下heap和stack大小

生成输出代码如下图所示。

五、模型调用及测试
在项目属性设置页面,开启float支持

在main.c源文件中,添加AI模型库的头文件
- /* Private includes ----------------------------------------------------------*/
- /* USER CODE BEGIN Includes */
- #include <stdlib.h>
- #include "../../ICore/key/key.h"
- #include "../../ICore/led/led.h"
- #include "../../ICore/print/print.h"
- #include "../../ICore/usart/usart.h"
- #include "../../ICore/LSM6DSL/LSM6DSL.h"
- #include "../../X-CUBE-AI/app/my_har.h"
- #include "../../X-CUBE-AI/app/my_har_data.h"
- /* USER CODE END Includes */
在main.c源文件中,添加AI模型库支持函数
- /* Private user code ---------------------------------------------------------*/
- /* USER CODE BEGIN 0 */
- void out_print(int32_t acc_x, int32_t acc_y, int32_t acc_z)
- {
- if(acc_x>0)
- printf("%d.%d, ",(acc_x*98)/10000,((acc_x*98)%10000)/100);
- else
- printf("%d.%d, ",(acc_x*98)/10000,((-acc_x*98)%10000)/100);
- if(acc_y>0)
- printf("%d.%d, ",(acc_y*98)/10000,((acc_y*98)%10000)/100);
- else
- printf("%d.%d, ",(acc_y*98)/10000,((-acc_y*98)%10000)/100);
- if(acc_z>0)
- printf("%d.%d, ",(acc_z*98)/10000,((acc_z*98)%10000)/100);
- else
- printf("%d.%d, ",(acc_z*98)/10000,((-acc_z*98)%10000)/100);
- }
-
- /* Global handle to reference the instantiated C-model */
- static ai_handle network = AI_HANDLE_NULL;
-
- /* Global c-array to handle the activations buffer */
- AI_ALIGNED(32)
- static ai_u8 activations[AI_MY_HAR_DATA_ACTIVATIONS_SIZE];
-
- AI_ALIGNED(32)
- static ai_float in_data[AI_MY_HAR_IN_1_SIZE];
-
- AI_ALIGNED(32)
- static ai_float out_data[AI_MY_HAR_OUT_1_SIZE];
-
- /* Array of pointer to manage the model's input/output tensors */
- static ai_buffer *ai_input;
- static ai_buffer *ai_output;
- static ai_buffer_format fmt_input;
- static ai_buffer_format fmt_output;
-
- #define NSIZE 3
-
- void buf_print(void)
- {
- printf("in_data:");
- for (int i=0; i<AI_MY_HAR_IN_1_SIZE; i++)
- {
- printf("%.2f ",((ai_float*)in_data)[i]);
- }
- printf("\n");
- printf("out_data:");
- for (int i=0; i<AI_MY_HAR_OUT_1_SIZE; i++)
- {
- printf("%.2f ",((ai_float*)out_data)[i]);
- }
- printf("\n");
- }
-
- void aiPrintBufInfo(const ai_buffer *buffer)
- {
- printf("(%lu, %lu, %lu, %lu)", AI_BUFFER_SHAPE_ELEM(buffer, AI_SHAPE_BATCH),
- AI_BUFFER_SHAPE_ELEM(buffer, AI_SHAPE_HEIGHT),
- AI_BUFFER_SHAPE_ELEM(buffer, AI_SHAPE_WIDTH),
- AI_BUFFER_SHAPE_ELEM(buffer, AI_SHAPE_CHANNEL));
- printf(" buffer_size:%d ", (int)AI_BUFFER_SIZE(buffer));
- }
-
- void aiPrintDataType(const ai_buffer_format fmt)
- {
- if (AI_BUFFER_FMT_GET_TYPE(fmt) == AI_BUFFER_FMT_TYPE_FLOAT)
- printf("float%d ", (int)AI_BUFFER_FMT_GET_BITS(fmt));
- else if (AI_BUFFER_FMT_GET_TYPE(fmt) == AI_BUFFER_FMT_TYPE_BOOL) {
- printf("bool%d ", (int)AI_BUFFER_FMT_GET_BITS(fmt));
- } else { /* integer type */
- printf("%s%d ", AI_BUFFER_FMT_GET_SIGN(fmt)?"i":"u",
- (int)AI_BUFFER_FMT_GET_BITS(fmt));
- }
- }
-
- void aiPrintDataInfo(const ai_buffer *buffer,const ai_buffer_format fmt)
- {
- if (buffer->data)
- printf(" @0x%X/%d \n",
- (int)buffer->data,
- (int)AI_BUFFER_BYTE_SIZE(AI_BUFFER_SIZE(buffer), fmt)
- );
- else
- printf(" (User Domain)/%d \n",
- (int)AI_BUFFER_BYTE_SIZE(AI_BUFFER_SIZE(buffer), fmt)
- );
- }
-
- void aiPrintNetworkInfo(const ai_network_report report)
- {
- printf("Model name : %s\n", report.model_name);
- printf(" model signature : %s\n", report.model_signature);
- printf(" model datetime : %s\r\n", report.model_datetime);
- printf(" compile datetime : %s\r\n", report.compile_datetime);
- printf(" runtime version : %d.%d.%d\r\n",
- report.runtime_version.major,
- report.runtime_version.minor,
- report.runtime_version.micro);
- if (report.tool_revision[0])
- printf(" Tool revision : %s\r\n", (report.tool_revision[0])?report.tool_revision:"");
- printf(" tools version : %d.%d.%d\r\n",
- report.tool_version.major,
- report.tool_version.minor,
- report.tool_version.micro);
- printf(" complexity : %lu MACC\r\n", (unsigned long)report.n_macc);
- printf(" c-nodes : %d\r\n", (int)report.n_nodes);
-
- printf(" map_activations : %d\r\n", report.map_activations.size);
- for (int idx=0; idx<report.map_activations.size;idx++) {
- const ai_buffer *buffer = &report.map_activations.buffer[idx];
- printf(" [%d] ", idx);
- aiPrintBufInfo(buffer);
- printf("\r\n");
- }
-
- printf(" map_weights : %d\r\n", report.map_weights.size);
- for (int idx=0; idx<report.map_weights.size;idx++) {
- const ai_buffer *buffer = &report.map_weights.buffer[idx];
- printf(" [%d] ", idx);
- aiPrintBufInfo(buffer);
- printf("\r\n");
- }
- }
-
- /*
- * Bootstrap
- */
- int aiInit(void) {
- ai_error err;
-
- /* Create and initialize the c-model */
- const ai_handle acts[] = { activations };
- err = ai_my_har_create_and_init(&network, acts, NULL);
- if (err.type != AI_ERROR_NONE) {
- printf("ai_error_type:%d,ai_error_code:%d\r\n",err.type,err.code);
- };
-
- ai_network_report report;
- if (ai_my_har_get_report(network, &report) != true) {
- printf("ai get report error\n");
- return -1;
- }
-
- aiPrintNetworkInfo(report);
-
- /* Reteive pointers to the model's input/output tensors */
- ai_input = ai_my_har_inputs_get(network, NULL);
- ai_output = ai_my_har_outputs_get(network, NULL);
- //
- fmt_input = AI_BUFFER_FORMAT(ai_input);
- fmt_output = AI_BUFFER_FORMAT(ai_output);
-
- printf(" n_inputs/n_outputs : %u/%u\r\n", report.n_inputs,
- report.n_outputs);
- printf("input :");
- aiPrintBufInfo(ai_input);
- aiPrintDataType(fmt_input);
- aiPrintDataInfo(ai_input, fmt_input);
- //
- printf("output :");
- aiPrintBufInfo(ai_output);
- aiPrintDataType(fmt_output);
- aiPrintDataInfo(ai_output, fmt_output);
- return 0;
- }
-
- int acquire_and_process_data(void *in_data,uint8_t index, int32_t acc_x, int32_t acc_y, int32_t acc_z)
- {
- char buf_srt[64]={0};
- if(acc_x>0){
- sprintf(buf_srt,"%d.%d, ",(acc_x*98)/10000,((acc_x*98)%10000)/100);
- ((ai_float*)in_data)[NSIZE*index] =(float)atof(buf_srt);
- }else{
- sprintf(buf_srt,"%d.%d, ",(acc_x*98)/10000,((-acc_x*98)%10000)/100);
- ((ai_float*)in_data)[NSIZE*index] =(float)atof(buf_srt);
- }
- if(acc_y>0){
- sprintf(buf_srt,"%d.%d, ",(acc_y*98)/10000,((acc_y*98)%10000)/100);
- ((ai_float*)in_data)[NSIZE*index+1] =(float)atof(buf_srt);
- }else{
- sprintf(buf_srt,"%d.%d, ",(acc_y*98)/10000,((-acc_y*98)%10000)/100);
- ((ai_float*)in_data)[NSIZE*index+1] =(float)atof(buf_srt);
- }
- if(acc_z>0){
- sprintf(buf_srt,"%d.%d, ",(acc_z*98)/10000,((acc_z*98)%10000)/100);
- ((ai_float*)in_data)[NSIZE*index+2] =(float)atof(buf_srt);
- }else{
- sprintf(buf_srt,"%d.%d, ",(acc_z*98)/10000,((-acc_z*98)%10000)/100);
- ((ai_float*)in_data)[NSIZE*index+2] =(float)atof(buf_srt);
- }
- return 0;
- }
- /*
- * Run inference
- */
- int aiRun(const void *in_data, void *out_data) {
- ai_i32 n_batch;
- ai_error err;
-
- /* 1 - Update IO handlers with the data payload */
- ai_input[0].data = AI_HANDLE_PTR(in_data);
- ai_output[0].data = AI_HANDLE_PTR(out_data);
-
- /* 2 - Perform the inference */
- n_batch = ai_my_har_run(network, &ai_input[0], &ai_output[0]);
- if (n_batch != 1) {
- err = ai_my_har_get_error(network);
- printf("ai_error_type:%d,ai_error_code:%d\r\n",err.type,err.code);
- };
-
- return 0;
- }
-
- /* USER CODE END 0 */
在main函数中初始化ai模型
- /* USER CODE BEGIN 2 */
- ResetPrintInit(&hlpuart1);
- HAL_UART_Receive_IT(&hlpuart1,(uint8_t *)&HLPUSART_NewData, 1); //再开启接收中断
- HLPUSART_RX_STA = 0;
- //LSM6DSL
- LSM6DSL_init();
- LSM6DSL_acc_st_open();
- acc_x = acc_y = acc_z = 0;
- uint8_t menu = 0;
- uint8_t step_size = NSIZE;
- //
- aiInit();
- buf_print();
- /* USER CODE END 2 */
在main函数循环体中,通过串口lpuart1调试发送test,开启将实时数据推送给ai模型
- /* Infinite loop */
- /* USER CODE BEGIN WHILE */
- while (1)
- {
- if(HLPUSART_RX_STA&0xC000){//溢出或换行,重新开始
- printf("%.*s\r\n",HLPUSART_RX_STA&0X0FFF, HLPUSART_RX_BUF);
- if(strstr((const char*)HLPUSART_RX_BUF,(const char*)"test"))
- {
- menu = 0x08;
- }
- HLPUSART_RX_STA=0;//接收错误,重新开始
- HAL_Delay(100);//等待
- }
- if(KEY_0())
- {
- if(menu&0x01)
- menu &= 0XFE; //取消静止不动数据刷新
- else{
- menu |= 0X01; //开启静止不动数据刷新
- }
- menu &= 0XF9; //取消其他数据刷新
- }
- if(KEY_1())
- {
- if(menu&0x02)
- menu &= 0XFD; //取消左右移动数据刷新
- else{
- menu |= 0X02; //开启左右移动数据刷新
- }
- menu &= 0XFA; //取消其他数据刷新
-
- }
- if(KEY_2())
- {
- if(menu&0x04)
- menu &= 0XFB; //取消上下移动数据刷新
- else{
- menu |= 0X04; //开启上下移动数据刷新
- }
- menu &= 0XFC; //取消其他数据刷新
-
- }
- if(menu&0x01)//静止不动
- {
- for(uint8_t i =0; i<step_size;i++){
- LSM6DSL_acc_read(&acc_x,&acc_y,&acc_z);
- out_print(acc_x,acc_y,acc_z);
- HAL_Delay(100);//等待
- }
- printf("1, 0, 0\r\n");
- Toggle_led0();
- }
- if(menu&0x02)//左右移动
- {
- for(uint8_t i =0; i<step_size;i++){
- LSM6DSL_acc_read(&acc_x,&acc_y,&acc_z);
- out_print(acc_x,acc_y,acc_z);
- HAL_Delay(100);//等待
- }
- printf("0, 1, 0\r\n");
- Toggle_led1();
- }
- if(menu&0x04)//上下移动
- {
- for(uint8_t i =0; i<step_size;i++){
- LSM6DSL_acc_read(&acc_x,&acc_y,&acc_z);
- out_print(acc_x,acc_y,acc_z);
- HAL_Delay(100);//等待
- }
- printf("0, 0, 1\r\n");
- Toggle_led2();
- }
- if(menu&0x08)//测试
- {
- for(uint8_t i =0; i<step_size;i++){
- LSM6DSL_acc_read(&acc_x,&acc_y,&acc_z);
- acquire_and_process_data(in_data,i,acc_x,acc_y,acc_z);
- HAL_Delay(100);//等待
- }
- aiRun(in_data, out_data);
- buf_print();
- }
- /* USER CODE END WHILE */
编译及下载程序

串口助手通过lpuart1连接开发板,发送“test”,开启AI计算,静止不动开发板情况如下:

左右移动开发板测试输出:

上下移动(垂直方向)开发板测试输出:

通过测试可以看出,基本能识别开发板的行为,若需要更准确的识别,更好数据采集方法,也可以更多姿态行为模式计算(开发板不同朝向、倾斜度等)
————————————————
版权声明:py_free-物联智能
如有侵权请联系删除
|

 微信公众号
微信公众号
 手机版
手机版