|
这一次我们探索另一种常见的串行通讯方式——SPI(串行外设接口)。SPI 作为一种高速、全双工、同步的通信总线,在众多嵌入式系统和电子设备中都有着广泛的应用。而为了对 SPI 接口的功能进行全面且有效的测试,我们本次将采用一种独特且实用的测试方法——Loopback(回环)测试。 在 SPI 通信架构中,主要涉及到四个关键的信号引脚:SCK(串行时钟)、MOSI(主设备输出/从设备输入)、MISO(主设备输入/从设备输出)以及 CS(从设备选择)。主设备通过 SCK 引脚提供时钟信号,控制数据的传输节奏;MOSI 引脚用于主设备向从设备发送数据;MISO 引脚则负责从设备向主设备回传数据;CS 引脚用于主设备选择与之通信的从设备。 而 Loopback 测试方法,其核心精髓在于构建一个自环通路,让 SPI 通信在不依赖外部从设备的情况下,也能快速验证 SPI 接口的基本功能是否正常运作。具体实现方式是将 SPI 主设备的 MOSI 引脚与 MISO 引脚进行短接。这样一来,主设备发送出去的数据,无需经过外部设备的中转,直接通过短接的线路被自身接收,从而形成一个完整的闭环验证系统。这种方式有这一些显著优势: 高效排除硬件连接问题 在实际的复杂电子系统中,硬件连接问题往往是导致通信故障的常见因素之一。外部设备可能由于接触不良、线路受到电磁干扰、引脚虚焊等多种原因,使得 SPI 通信无法正常进行。而通过 Loopback 测试,我们可以将问题范围迅速缩小到 SPI 控制器本身。因为在这种测试模式下,数据传输完全在主设备内部完成,无需考虑外部设备的连接状态。如果测试能够顺利通过,就说明 SPI 控制器的硬件部分基本工作正常,从而排除了因硬件连接问题导致的通信失败的可能性,为后续的故障排查提供了明确的方向。 全面验证协议配置 SPI 通信协议具有多种可配置的参数,这些参数的正确设置对于通信的成功至关重要。例如,时钟极性(CPOL)决定了串行时钟信号在空闲状态时的电平高低;时钟相位(CPHA)则规定了数据采样和变化的时刻与时钟信号边沿的关系;数据位宽可以是 8 位、16 位甚至更宽,影响着每次传输的数据量;传输方向也有全双工和半双工之分,决定了数据是否可以同时进行双向传输。Loopback 测试为验证这些关键参数配置是否正确提供了一个绝佳的平台。在测试过程中,我们可以按照预定的协议配置发送特定格式的数据,然后检查主设备接收到的数据是否与发送的数据一致。如果数据能够准确无误地被接收,就说明当前的协议配置是正确的;反之,如果出现数据错误或通信异常,我们就可以根据测试结果有针对性地调整协议参数,直到找到正确的配置组合。 显著简化调试流程 在开发初期,准备外部从设备往往需要花费大量的时间和精力。不仅要确保从设备的硬件连接正确无误,还需要对从设备进行相应的编程和配置,以使其能够与主设备进行正常的通信。而 Loopback 测试则完全摒弃了这一繁琐的过程,无需准备外部从设备,大大节省了测试准备时间。开发人员可以在开发环境搭建完成后,立即进行 SPI 接口的基本功能测试,快速验证硬件基础功能是否正常。这使得开发人员能够更加专注于 SPI 控制器本身的功能实现和优化,提高了开发效率,缩短了产品的开发周期。 要实现Loopback测试最主要的硬件部分就是引脚短接,本开发板上连接了很多的外设器件,那么我们想要短接只能找一下能用的外接接口: 
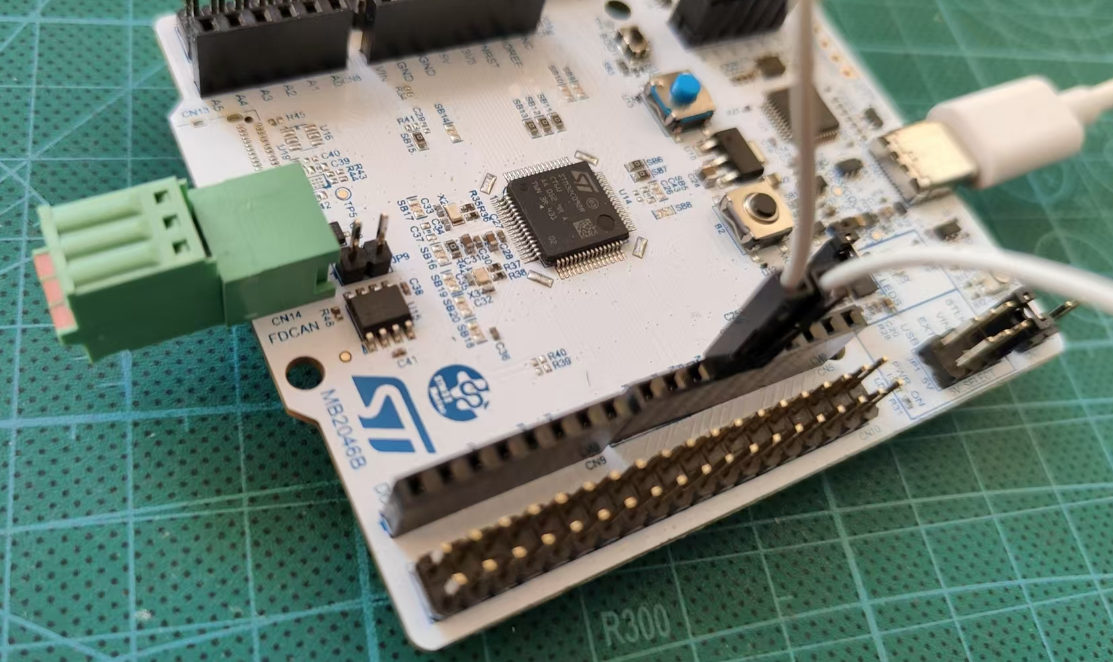
最有效的就是使用arduino接口,CN5对应的就有SPI对应的是D11和D12,注意这个不是MCU的引脚,对应的引脚是PA6和PA7 进一步查看STM32CubeMX可以看到,这里我们选择SPI1: 
实物连接如下: 
接下来我们进行SPI的配置, 
接下来编写一下SPI测试程序:

可以看到数据收到后通过串口发送了出来,和传输的数据是一样的(后16个),其实SPI还有很多用处,很多外设模块使用的都是SPI接口,有时候只发送(比如一些TFT的控制),更多的是传感器,不过需要注意很多从机的传感器是需要主机提供时钟的,也就是说在读取的时候也需要主机给时钟驱动,还有一点就是SPI的频率不能太高,本次我使用2分频(SPI频率24MHz)就SPI通信失败了,没有收到数据,将分频提高到32(1.5MHz)就通信成功了。 |
【STM32C0评测】4、驱动Lorasx126x,实现透传
STM32C0 × HDSMART弘大智控解锁旋钮式智能控制器,开启人机交互新体验
基于编码器信号的PWM输出示例
【新品发布】STM32C0 三大子产品线齐发,精准适配价格敏感应用(文末有奖)
有奖直播 | 超性价比入门级MCU:STM32C0全新子产品线深度解读
【STM32C0测评】Nucleo-C092开发板驱动DS1302实验
【STM32峰会观看直播获奖】晒奖品
STM32C071RB外部中断控制小灯点亮熄灭
STM32C071RB实现串口收发功能
【STM32C071RBT6测评】——PWM输出测试:实现一个呼吸灯
 微信公众号
微信公众号
 手机版
手机版