大家好,这里是C70EH, 好久不见,千呼万唤始出来,非常有幸获得了评测STM32U3C5单片机的机会。

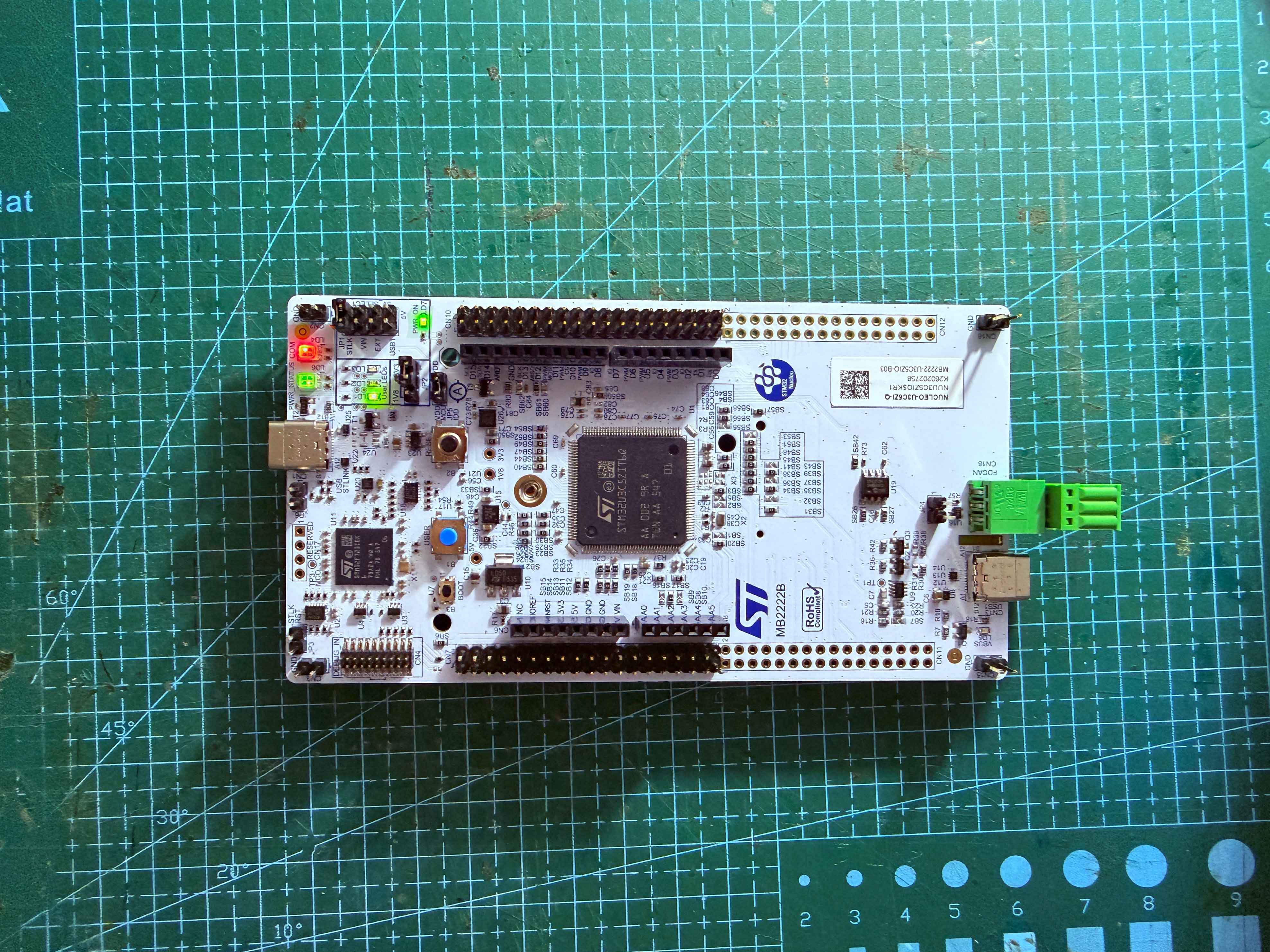
这块板子我收到的时间正好是儿童节,可以看作是给我这个半吊子水乱晃工程师的儿童节礼物了~在这里谢谢论坛的管理员同志!我真的很喜欢它的蓝白色配色。

这块板子功能非常强大如果说U385是铁路上面的一等站,那么它的升级换代产品U3C5就是特等站的级别了。所以我们第一个点灯的Demo不会太简单了,应当有点仪式感才对是吧。
 我们可以看到,程序在上电的时候LD1指示灯亮起。
我们可以看到,程序在上电的时候LD1指示灯亮起。


然后按下按键依次出现LD2,LD3亮起,

再次按下按键,LD1进入呼吸状态。LD1逐渐亮起,LD3会亮,然后当LD1逐渐熄灭,LD2会亮,再次按下按键后,呼吸速度变慢了,再次按下,此时LD1亮起,这就是程序的现象。

此时我们打开串口,按下单片机的复位按键,可以看到打印出了板卡的评测信息以及当前状态。我们按下按键后,就会自动开始打印当前按下了几次,分别是什么状态。
值得注意的是,使用STM32U3C5单片机,你需要注意你需要一个最新STM32CubeProgrammer编程软件,以及你还需要最新的STM32CubeMX软件。如果你使用老版的话,是没有办法识读到这块今年4月刚刚推出的最新型号的MCU的。
这里我们来看一下这个程序需要怎么配置。首先配置基本的GPIO如下:

配置时钟如下:

配置定时器如下:

还有需要配置串口和中断优先级等。这里外部中断的优先级给到1就好。

我会上传所有需要配置的界面截图并附上我的代码。只需要根据这份截图配置以及上传我的代码,就可以在你的U3C5上看到一模一样的程序现象。
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
#include "stdio.h"
int i;
void SystemClock_Config(void);
void LED_Breathe(int Num);
void EXTI13_IRQHandlerCallBack(void);
void EXTI13_IRQHandlerCallBack(void){
i=i+1;
if(i>4){
i=0;
}
printf("press down:");
printf("%d\n",i);
}
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM2_Init();
MX_USART1_UART_Init();
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_1);
printf("ST Chinese Forum Evaluation Plan\r\n");
printf("Board Mode:Nucleo-U3C5\r\n");
printf("Demo1:External Interrupt control PWM LED\r\n");
printf("Reviewer:Xiang Zhong Bli:C70E\r\n");
while (1)
{
switch(i){
case 0:
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_1,99);
HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LD3_GPIO_Port, LD3_Pin, GPIO_PIN_RESET);
break;
case 1:
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_1,0);
HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(LD3_GPIO_Port, LD3_Pin, GPIO_PIN_RESET);
break;
case 2:
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_1,0);
HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LD3_GPIO_Port, LD3_Pin, GPIO_PIN_SET);
break;
case 3:
LED_Breathe(10);
break;
case 4:
LED_Breathe(20);
break;
}
}
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the System Power Supply
*/
if (HAL_PWREx_ConfigSupply(PWR_SMPS_SUPPLY) != HAL_OK)
{
Error_Handler();
}
/** Enable Epod Booster
*/
if (HAL_RCCEx_EpodBoosterClkConfig(RCC_EPODBOOSTER_SOURCE_MSIS, RCC_EPODBOOSTER_DIV1) != HAL_OK)
{
Error_Handler();
}
if (HAL_PWREx_EnableEpodBooster() != HAL_OK)
{
Error_Handler();
}
/** Configure the main internal regulator output voltage
*/
if (HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1) != HAL_OK)
{
Error_Handler();
}
/** Set Flash latency before increasing MSIS
*/
__HAL_FLASH_SET_LATENCY(FLASH_LATENCY_3);
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_MSIS;
RCC_OscInitStruct.MSISState = RCC_MSI_ON;
RCC_OscInitStruct.MSISSource = RCC_MSI_RC0;
RCC_OscInitStruct.MSISDiv = RCC_MSI_DIV1;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_PCLK3;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_MSIS;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB3CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK)
{
Error_Handler();
}
}
/*控制LED呼吸*/
void LED_Breathe(int Num){
HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LD3_GPIO_Port, LD3_Pin, GPIO_PIN_SET);
for(uint8_t i=0;i<100;i++){
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_1,i);
HAL_Delay(Num);
}
HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(LD3_GPIO_Port, LD3_Pin, GPIO_PIN_RESET);
for(uint8_t i=99;i>0;i--){
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_1,i);
HAL_Delay(Num);
}
}
int fputc(int ch,FILE *f)
{
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,0xFFFF);
return ch;
}
void Error_Handler(void)
{
__disable_irq();
while (1)
{
}
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
 微信公众号
微信公众号
 手机版
手机版