|
串口通信原理 想必玩过一点单片机的人都懂一点串口通信,而恐怕我们印象中的串口通信不过如此,两个芯片通过串口通信,需要共地、Tx(发送)和Rx(接收)相互连接即可:
而实际上,串口通讯种类繁多,即使是通用异步收发器UART也有RS-232和RS-485等不同接口,有兴趣可以深入学习。
首先串口通信指的是一种设备通信的协议而不是指接口。串口通信的概念非常简单,串口按位(bit)发送和接收字节。而我们所使用的USART和UART的区别是可以同步,你在STM32的datasheet里可以看到USART2_CK,而实际上我们很少使用,我们完全可以把USART当UART来用。
HC06蓝牙模块
无线蓝牙透传模块。
默认名字HC06、波特率9600bps、配对密码00000。
用Arduino的时候想必是很傻瓜式的,如果用STM32来做还是要了解一番的。
首先好好看一下datasheet,看一下AT指令集,然后用一个USB转TTL的模块(这里用的是CH340)和电脑连接:
可以看到HC06的指示灯一直在闪,说明蓝牙未连接。打开串口助手,试一试AT指令是否有效,然后你就可以设置波特率(建议就选默认的9600,据说快了会降低通信的稳定性),改名字和密码,详见datasheet。
打开蓝牙串口APP,会自动连接,连接以后指示灯就从闪烁变成常亮了。在串口助手里把HEX显示给勾上,然后用APP发几条指令,会发现收到这样:
那就说明蓝牙这边不会出问题了,专心调试STM32吧 - -‘
STM32F407的USART2配置
首先查datasheet表,找USART2对应的是哪个GPIO:
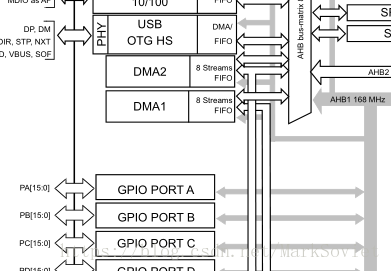
千万不要忘记查看总线!
看了系统架构就会知道,F103和407的GPIO挂在不同的总线上。103挂在APB2上,而407挂在AHB1上,所以初始化时钟的时候千万要注意~
- RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
另外在配置GPIO时的参数也有不同:
我们查看GPIO_InitTypeDef的定义:
- //STM32F103中的定义:
- typedef struct
- {
- uint16_t GPIO_Pin;
- GPIOSpeed_TypeDef GPIO_Speed;
- GPIOMode_TypeDef GPIO_Mode;
- }GPIO_InitTypeDef;
- //STM32F407中的定义:
- typedef struct
- {
- uint32_t GPIO_Pin;
- GPIOMode_TypeDef GPIO_Mode;
- GPIOSpeed_TypeDef GPIO_Speed;
- GPIOOType_TypeDef GPIO_OType;
- GPIOPuPd_TypeDef GPIO_PuPd;
- }GPIO_InitTypeDef;
可以看到F407多出了两个参数,即GPIO_OType和GPIO_PuPd。 在F103需要分别设置两个引脚的Mode为复用推挽输出(GPIO_Mode_AF_PP)和浮空输入(GPIO_Mode_IN_FLOATING);但是在F407,两个引脚可以一起设置为GPIO_Mode_AF,并且都设置为推挽输出即可(这个我研究了好半天,据说是因为F1和F4的GPIO复用功能不同,F4复用功能不是在配置IO口模式这儿去配置,而是需要单独配置复用模式,然后再映射,总之就是F407配置串口复用的时候不管Rx还是Tx统统设置为复用推挽输出就好了。) 剩下的USART2初始化、中断初始化等都和F1一样。 最后详细代码如下: bluetooth.h: - <font face="Tahoma" size="3">#ifndef __USART2_H
- #define __USART2_H
- #include "stdio.h"
- #include "stm32f4xx_conf.h"
- #include "sys.h"
- #define USART2_REC_LEN 200
- #define EN_USART2_RX 1
- extern u8 USART2_RX_BUF[USART2_REC_LEN];
- extern u16 USART2_RX_STA;
- void bluetooth_init(u32 bound);
- #endif</font>
bluetooth.c: - <font face="Tahoma" size="3">#include "sys.h"
- #include "bluetooth.h"
- //这个是一个舵机控制板的驱动,感兴趣的可以看我下一篇博客
- #include "pcf8574.h"
- #if SYSTEM_SUPPORT_OS
- #include "includes.h"
- #endif
- #if EN_USART2_RX
- u8 USART2_RX_BUF[USART2_REC_LEN];
- u16 USART2_RX_STA=0;
- void bluetooth_init(u32 bound){
- GPIO_InitTypeDef GPIO_InitStructure;
- USART_InitTypeDef USART_InitStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
- RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);
- GPIO_PinAFConfig(GPIOA,GPIO_PinSource2,GPIO_AF_USART2);
- GPIO_PinAFConfig(GPIOA,GPIO_PinSource3,GPIO_AF_USART2);
- //GPIOA2,3->USART2RxTx
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
- GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
- GPIO_Init(GPIOA,&GPIO_InitStructure);
- //USART2 init
- USART_InitStructure.USART_BaudRate = bound;
- USART_InitStructure.USART_WordLength = USART_WordLength_8b;
- USART_InitStructure.USART_StopBits = USART_StopBits_1;
- USART_InitStructure.USART_Parity = USART_Parity_No;
- USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
- USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
- USART_Init(USART2, &USART_InitStructure);
- USART_Cmd(USART2, ENABLE);
- //USART2_ClearFlag(USART2, USART2_FLAG_TC);
- #if EN_USART2_RX
- USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//interrupt
- //USART2 NVIC
- NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;//USART2 interrupt channel
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;
- NVIC_InitStructure.NVIC_IRQChannelSubPriority =3;
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IQR enable
- NVIC_Init(&NVIC_InitStructure);
- #endif
- }
- void USART2_IRQHandler(void)
- {
- u8 Res;
- #if SYSTEM_SUPPORT_OS
- OSIntEnter();
- #endif
- if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET)
- {
- Res =USART_ReceiveData(USART2);//(USART2->DR)
- // USART_SendData(USART2,Res);
- if(Res == 0x00)
- down();
- if(Res == 0x01)
- up();
- }
- #if SYSTEM_SUPPORT_OS
- OSIntExit();
- #endif
- }
- #endif </font>
|  STMCU-管管
发布时间:2020-9-11 13:27
STMCU-管管
发布时间:2020-9-11 13:27




 微信公众号
微信公众号
 手机版
手机版