STMCU-管管
发布时间:2021-6-25 13:42
STMCU-管管
发布时间:2021-6-25 13:42
|
STM32F103实现小车的转动 首先,我们要明白:电机转动的实质其实是对PWM波的控制输出;( 库函数直接调用封装好的函数 TIM_SetCompare1()或者用CCR调节占空比) PWM波输出的原理图如下: 
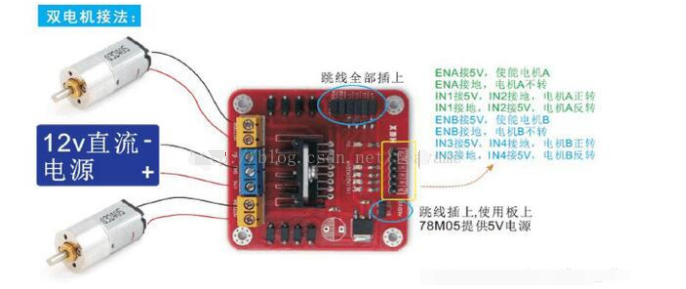
下面我从网上找到了一个L298N电机驱动实物图,进行详细的描述:(通过此图可以进行实物连接) 注:千万小心,不要把引脚接反了,会少了芯片。 
我小车是直接控制两个电机,四个电机分成两组。让其中一侧电机的状态相同,另一个状态相同,,没有分别单独控制。 通过下图可以参考:IN1 IN2 IN3 IN4 1 0 1 0 实现电机的正转 小车前进 0 1 0 1 实现电机的反转 小车后退 1 0 0 1 小车右转 0 1 1 0 小车左转 但所有的前提是要先学会时钟实验和GPIO的初始化,这个时候就要补上上次STM32学习的内容了。 先进行STM32时钟和GPIO的学习 附上电机初始化代码
需要注意的是PWM时钟输出的arr和psc的关系: 系统时钟设置为72MHz; PWMFre=Sys/(arr+1)(psc+1) TIM1_PWM_Init(999,71);//分频。PWM频率=72000/(999+1)*(71+1)=1Khz 周期为:1/1khz; |
TFT LCD 与 FSMC 的硬件连接大容量 STM32F10xxx FSMC 接口
单片机:初学者该了解的STM32F103基础知识
OpenBLT移植到STM32F103战舰开发板上适用于所有STM32F103系列的Bootloader
2025软件工具兔哥知道
STM32之继电器模块
STM32固件库分享,超全系列整理
【MCU实战经验】基于STM32F103的二轮平衡车(6轴上位机 源代...
10张图带你完全掌握STM32 GPIO,从入门到精通,收藏就够了!
如果你解决了这些问题,就可以直接学STM32
STM32的分类和选型
 微信公众号
微信公众号
 手机版
手机版