|
我已经在我的另外一篇博客中写到了如何进行芯片与树莓派的通信,传送门在下面:
那么我们接收到串口的数据之后如何进行解析处理呢?今天这篇帖子主要就是解决这个问题啦~
程序处理逻辑
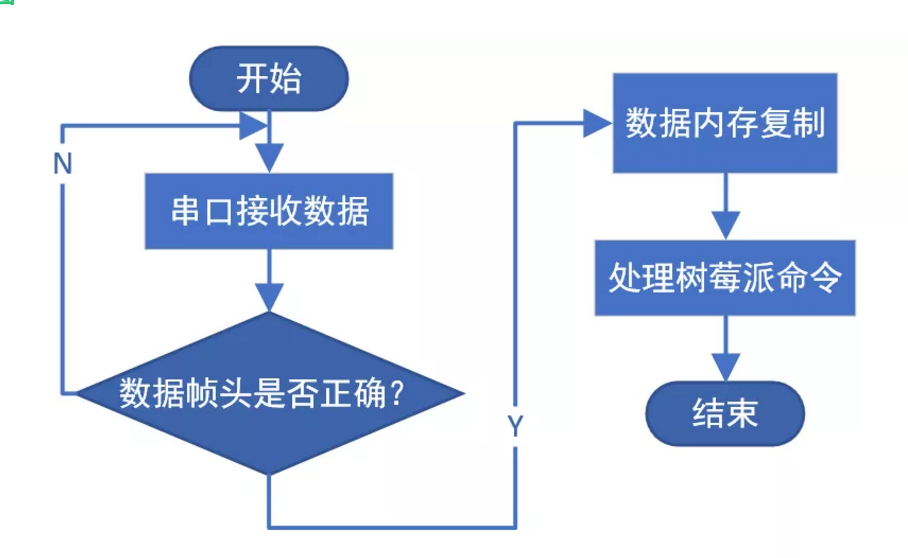
流程图

自然语言描述
自然语言描述起来的话还是比较简单的,既然要处理数据,那么最开始肯定先要把数据通过串口接收下来,这个时候就用到了HAL_UART_Receive_DMA(&huart8, uart8Rx, buffer_size);这个函数,当接收到了数据之后我们要判断帧头是否正确,如果正确的话我们就将数据复制到相应数组里面去,用的就是这个函数SERDEB_PushCmd(uart8Rx, uart8RxLength);,如果帧头错误就需要等待下一次串口接收数据,数据接收部分完成之后就开始对数据包开始做解析了,解析帧头后面的数据包内容用的是这两个函数DebugCmdProceed();和GetDebugCmd(uint8_t *cmd, uint16_t len),最后根据数据包里面的信息更改芯片内的变量数值,从而实现了树莓派对于底盘运动的控制。
程序分析
接下来我将结合代码具体分析整个流程~
数据接收
首先是数据接收部分了,详细代码在下面:
- <font face="微软雅黑" size="3">#define buffer_size 1024
- if( huart == &huart8)
- {
- test3++;
- HAL_UART_Receive_DMA(&huart8, uart8Rx, buffer_size);
-
- uart8RxLength = buffer_size-__HAL_DMA_GET_COUNTER(&hdma_uart8_rx);
- if(uart8Rx[0]=='@'
- &&uart8Rx[1]=='c'
- &&uart8Rx[2]=='m'
- &&uart8Rx[3]=='d')
- {
- if(!SERDEB_CmdValid())
- SERDEB_PushCmd(uart8Rx, uart8RxLength);
- }
- __HAL_DMA_DISABLE(&hdma_uart8_rx);
- HAL_GPIO_TogglePin(GPIOG,GPIO_PIN_8);
- }</font>
我再放一下SERDEB_PushCmd(uart8Rx, uart8RxLength);的源码,这个函数实现的目标就是内存复制。
- <font face="微软雅黑" size="3">void SERDEB_PushCmd(uint8_t *cmd, uint16_t len)
- {
- memcpy((uint8_t *)(debugCmd.cmd), cmd, len);
- debugCmd.cmd[len] = '\0'; // end of string;
- debugCmd.valid = TRUE;
- debugCmd.cmdLen = len;
- }</font>
玄机就是这个语句:debugCmd.cmd[len] = '\0';。这个关键点就相当于是给数组添加了一个结束字节,这样可以极大程度上方便之后的数据处理。
也就是说HAL_UART_Receive_DMA(&huart8, uart8Rx, buffer_size);函数是从串口缓冲区拿到数据,SERDEB_PushCmd(uart8Rx, uart8RxLength);是给取到的数据末尾加上停止标志位,方便之后的数据处理。
因为函数SERDEB_PushCmd(uart8Rx, uart8RxLength);需要复制内存的字节数,所以需要uart8RxLength = buffer_size-__HAL_DMA_GET_COUNTER(&hdma_uart8_rx);来计算得到串口接收到的字节数。
__HAL_DMA_GET_COUNTER(&hdma_uart8_rx);DMA接收中断使能时该宏将会返回当前接收内存的剩余字节数(总字节数-剩余字节数=串口接受字节数) 。
数据处理
当数据接收完成并且添加了结束字节之后就开始数据处理啦~
首先对数据做一个粗处理,就是先把数据数组里的数据包进行分解,分到了3个不同的数组里,分别是debArray[0],debArray[1],debArray[2],并且将数组里面的数值分别赋值到mov_sta,move_mode,step三个变量里。
因为接收到的串口数据是字符型的,所以需要将其转换成数字,所以就用了这个static uint8_t atoi(uint8_t *str, uint16_t *num)函数将接收到的字符转换成数字。
- <font face="微软雅黑" size="3">static uint8_t atoi(uint8_t *str, uint16_t *num)
- {
- #define MAX_DIG 10
-
- uint8_t dig = 0, cnt;
- uint8_t numTmp[MAX_DIG];
-
- memset((uint8_t *)numTmp, ' ', MAX_DIG);
- *num = 0;
-
- if(*str=='0'&&(*(str+1)=='x'||*(str+1)=='X'))
- {
- str+=2;
-
- do
- {
- if(*str>='0'&&*str<='9')
- {
- numTmp[dig] = *str - '0';
- }
- else if((*str>='a'&&*str<='f'))
- {
- numTmp[dig] = *str - 'a' + 10;
- }
- else if((*str>='A'&&*str<='F'))
- {
- numTmp[dig] = *str - 'A' + 10;
- }
-
- str++; dig++;
-
- if(dig>MAX_DIG-2)
- {
- break;
- }
- }
- while(
- (*str>='0'&&*str<='9')
- ||(*str>='a'&&*str<='f')
- ||(*str>='A'&&*str<='F')
- );
-
- for(cnt=0; cnt<dig; cnt++)
- {
- *num += (numTmp[cnt]*power(16, (dig-cnt-1)));
- }
-
- dig += 2;
- }
- else
- {
- do
- {
- numTmp[dig] = *str - '0';
- str++; dig++;
-
- if(dig>MAX_DIG-1)
- break;
- }while(*str>='0'&&*str<='9');
-
- for(cnt=0; cnt<dig; cnt++)
- {
- *num += (numTmp[cnt]*power(10, (dig-cnt-1)));
- }
- }
-
- return dig;
-
- #undef MAX_DIG
- }
-
- static uint32_t power(uint8_t base, uint8_t exponent)
- {
- uint32_t value;
- uint8_t cnt;
-
- if(exponent==0)
- return 1;
-
- value = 1;
- for(cnt=0; cnt<exponent; cnt++)
- {
- value *= base;
- }
-
- return value;
- }
- #define MAX_DEBBUF (1024)
- #define mov_sta debArray[0]
- #define move_mode debArray[1]
- #define step debArray[2]
- static uint8_t GetDebugCmd(uint8_t *cmd, uint16_t len)
- {
- uint8_t *pCmd;
- uint8_t index;
- uint8_t u8Temp = 0;
-
- pCmd = cmd;
-
- if(cmd[0]!='@'
- &&cmd[1] != 'c'
- &&cmd[2] != 'm'
- &&cmd[3] != 'd'
- &&cmd[4] != ' ')
- {
- printf("GetDebugCmd: error cmd format. It must be @cmd n1 n2 n3... \r\n");
- return FALSE;
- }
-
- pCmd += 5; // the first num
- index = 0; // index of debArray, ==0 the first num ==1 the second num ==2... ...
-
- while(1)
- {
- if(*pCmd=='\r'
- ||*pCmd=='\n'
- ||*pCmd=='\0'
- ||len==0)
- {
- break;
- }
-
- u8Temp = atoi(pCmd, (uint16_t *)(debArray+index));
- pCmd+=u8Temp; len-=u8Temp;
-
- pCmd+=1; len-=1;
- index++;
- }
-
- return TRUE;
- }</font>
- <font face="微软雅黑" size="3">static void DebugCmdProceed(void)
- {
- switch(mov_sta){
- case STOP:
- // printf("I'm stop\n");
- MOV_STA = STOP;
- speed=0;
- break;
-
- case RUN:
- //printf("start running\n");
- MOV_STA = RUN;
- cross_sta=mid_cnt;
- speed=0;
- break;
-
- case LEFT:
- // printf("start turning left\n");
- MOV_STA = LEFT ;
- cross_sta=mid_cnt;
- speed =0;
- break;
-
- case RIGHT:
- // printf("start turning right\n");
- MOV_STA = RIGHT ;
- cross_sta=mid_cnt;
- speed =0;
- break;
-
- case BACK:
- // printf("start going back\n");
- MOV_STA = BACK ;
- cross_sta=mid_cnt;
- speed =0;
- break;
-
- case GET_WALL:
- //printf("start running to wall\n");
- MOV_STA = GET_WALL ;
- cross_sta=mid_cnt;
- speed =0;
- break;
- }
-
-
- switch(move_mode){
- case MODE_A:
- MOV_MODE = MODE_A;
- //printf(",MODE : A");
- break;
- case MODE_B:
- MOV_MODE = MODE_B;
- //printf(",MODE : B");
- break;
- }
-
- printf("cross_sta is %d\n",cross_sta);
- switch(step){
- case 0:
- STEP = 0;
- //printf(" STEP: half ");
- break;
- case 1:
- STEP = 1;
- // printf(" STEP:1 ");
- break;
- case 2:
- STEP = 2;
- // printf(" STEP:2 ");
- break;
- case 3:
- STEP = 3;
- //printf(" STEP:3");
- break;
- case 4:
- STEP = 4;
- // printf(" STEP:4 ");
- break;
- case 5:
- STEP = 5;
- //printf(" STEP:5 ");
- break;
- }
- }</font>
|
.png) STMCU小助手
发布时间:2021-7-27 10:16
STMCU小助手
发布时间:2021-7-27 10:16
 微信公众号
微信公众号
 手机版
手机版