大概思路
1.利用定时器产生可控方波(选好定时器及通道),需要注意的是设置PWM输出引脚时要将引脚复用到定时器
2.将电机控制引脚设置成推挽输出模式
3.改变占空比即可改变速度
4.采用的电机驱动为TB6612,这里不做介绍
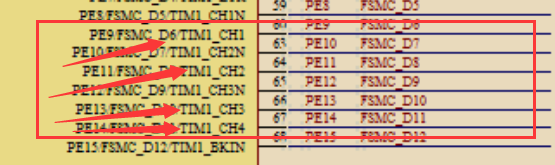
5.我这里用的是定时器1的通道1,2,3,4。可自行修改

定时器初始化
定时器1初始化
- <font face="微软雅黑" size="3">void TIM1_PWM_Init(u32 arr,u32 psc)
- {
- //此部分需手动修改IO口设置
- int ccr1=500,ccr2=500,ccr3=500,ccr4=500;
- GPIO_InitTypeDef GPIO_InitStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE); //TIM1时钟使能
- RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE); //使能时钟
-
- GPIO_PinAFConfig(GPIOE,GPIO_PinSource9,GPIO_AF_TIM1);
- GPIO_PinAFConfig(GPIOE,GPIO_PinSource11,GPIO_AF_TIM1);
- GPIO_PinAFConfig(GPIOE,GPIO_PinSource13,GPIO_AF_TIM1); //GPIOE9,E11,E13,E14复用为定时器1
- GPIO_PinAFConfig(GPIOE,GPIO_PinSource14,GPIO_AF_TIM1);
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_11|GPIO_Pin_13|GPIO_Pin_14; //GPIOF9
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
- GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
- GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
- GPIO_Init(GPIOE,&GPIO_InitStructure); //初始化IO口
-
- TIM_TimeBaseStructure.TIM_Prescaler=psc; //定时器分频
- TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
- TIM_TimeBaseStructure.TIM_Period=arr; //自动重装载值
- TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
-
- TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
-
- TIM_TimeBaseInit(TIM1,&TIM_TimeBaseStructure);//初始化定时器1
-
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
- ///**************
- TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;//输出同相
- TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
- TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCPolarity_High;
- TIM_OCInitStructure.TIM_Pulse = ccr1;
- TIM_OC1Init(TIM1, &TIM_OCInitStructure);
-
- TIM_OCInitStructure.TIM_Pulse = ccr2;
- TIM_OC2Init(TIM1, &TIM_OCInitStructure);
-
-
- TIM_OCInitStructure.TIM_Pulse = ccr3;
- TIM_OC3Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 OCx
- TIM_OCInitStructure.TIM_Pulse = ccr4; //设置待装入捕获比较寄存器的脉冲值
- TIM_OC4Init(TIM1, &TIM_OCInitStructure);
- TIM_Cmd(TIM1, ENABLE);
- TIM_CtrlPWMOutputs(TIM1,ENABLE);
- }
- </font>
高级定时器与通用定时器异同
1.采用定时器产生可控方波,高级定时器TIM1、TIM8与通用定时器配置有所不同,比通用定时器多两行代码:
下面展示一些 内联代码片。
- <font face="微软雅黑" size="3">TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;//重复计数器的值
- TIM_CtrlPWMOutputs(TIM1,ENABLE);//主输出使能,当使用的是通用定时器时,这句不需要</font>
电机IO口初始化
IO设置为推挽输出即可
我这里用的IO为D0,D1,D2,D3,D10,D11,B14,B15
(4个电机,8个IO)
- <font face="微软雅黑" size="3">void MOTOR_GPIO_Config(void) 电机控制对应IO口
- {
- /*定义一个GPIO_InitTypeDef类型的结构体*/
- GPIO_InitTypeDef GPIO_InitStructure;
- /*开启GPIOB的外设时钟*/
- RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE);
- /*选择要控制的引脚*/
- // 4个电机 ,8个IO口
- GPIO_InitStructure.GPIO_Pin =GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_10|GPIO_Pin_11;
- /*设置引脚模式为通用推挽输出*/
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
- /*设置引脚速率为50MHz*/
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- /*调用库函数,初始化*/
- GPIO_Init(GPIOD, &GPIO_InitStructure);
-
- RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
- GPIO_InitStructure.GPIO_Pin =GPIO_Pin_14|GPIO_Pin_15;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
- GPIO_SetBits(GPIOD,GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_10|GPIO_Pin_11);
- GPIO_SetBits(GPIOB,GPIO_Pin_14|GPIO_Pin_15);
- }
- </font>
改变占空比调速
调用函数改变占空比即可改变调速
- <font face="微软雅黑" size="3">TIM_SetCompareN(TIMx, Compare2)</font>
总结
控制电机、舵机这一类模块电源最好跟其它模块电源分开,不然对其它模块工作会有影响。(比如循迹模块啥的)。控制原理已知,具体效果看实际,需进行多次试验。
|
.png) STMCU小助手
发布时间:2021-8-13 13:55
STMCU小助手
发布时间:2021-8-13 13:55
 微信公众号
微信公众号
 手机版
手机版