PWM模式也叫脉冲宽度调制模式,它可以产生一个频率和占空比可调的方波。由TIMx_ARR寄存器确定频率、由TIMx_CCRx寄存器确定占空比的信号。在硬件电路中,PWM波产生通常是由一个三角波和参考值送入比较器中,然后比较器输出的就是PWM波。
![P_~R{DX]CL00QJ@NO~F0}38.png](data/attachment/forum/202203/19/204612opxjpcs2wqs2rc78.png "P_~R{DX]CL00QJ@NO~F0}38.png")
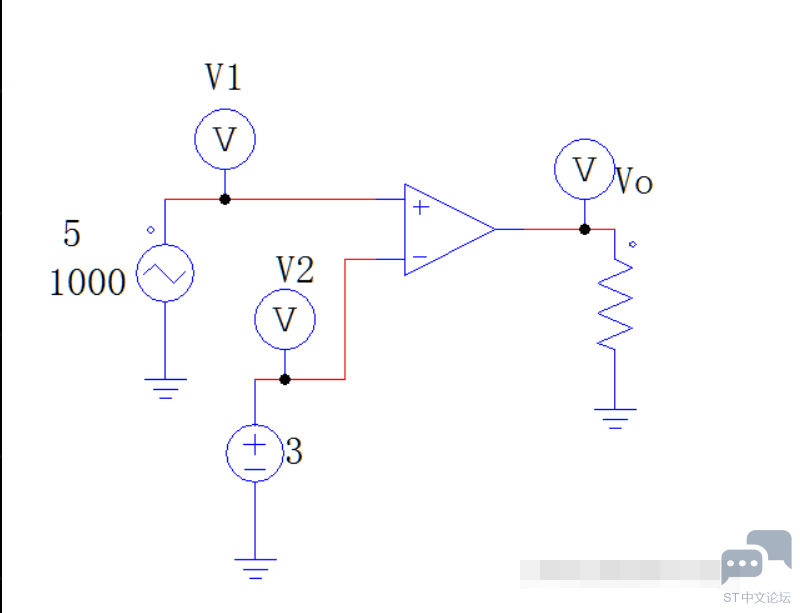
V1是三角波发生器,幅度为5V,频率为1K,V2是直流源,电压为3V,将这两个波形送入到比较器中,然后比较器输出的就是PWM波。输出波形如下:
![U[]WA5[8`W@ESN3180US0}R.png](data/attachment/forum/202203/19/204638yvjbraq7ttbavbvp.png "U[]WA5[8`W@ESN3180US0}R.png")
当V1的电压值大于V2时,比较器输出高电平。当V1电压值小于V2时,比较器输出的就是低电平。改变V2的值,就可以改变占空比。
![NQ$CU2@XD]Q`[9%P%K0.png](data/attachment/forum/202203/19/204638vmuz2qut1yzqymux.png "NQ$CU2@XD]Q`[9%P%K0.png")
在单片机中寄存器ARR的值就相当于V1的值,CCR的值就相当于V2的值。当ARR和CCR寄存器的值设置好之后,计时器在计数的过程中计数器值就会实时和这两个值比较,当计数器值小于CCR时,输出低电平,当计数器值大于CCR值时,输出高电平。当计数器的值等于ARR时,计数器就会清零。
在设置PWM计数模式的时候,一般有三种模式,向上计数模式、向下计数模式、中央对齐模式。
向上计数模式:指的是计数器从0开始递增计数,当计数值等于ARR时,计数器清0,然后从0开始重新递增计数。

向下计数模式:指的是计数器从ARR开始递减计数,当计数值等于0时,计数器值重新设置为ARR,然后从ARR开始重新递减计数。
XLS8[MB4BB8WSE0Y6.png")
中央对齐模式:指的是计数器0开始递增计数,当计数值等于ARR时,计时器开始递减计数。当计数器值减到0时,又开始递增计数。
![XJXOR8AI]4LC{I$HN~JL%LI.png](data/attachment/forum/202203/19/204638r6o27g7y6yze6o0o.png "XJXOR8AI]4LC{I$HN~JL%LI.png")
一般情况下用的比较多的就是向上计数模式,因为这种模式比较简单,理解起来也更容易一点。下面就通过代码来实现PWM的输出功能。
- void TIM3_PWM_Init(u16 arr, u16 psc)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO和AFIO复用功能模块时钟
- GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2(PA7)--->PB5 TIM3_CH1(PA6)-->PB4
- //设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
- //初始化TIM3
- TIM_TimeBaseInitStructure.TIM_Period = arr;
- TIM_TimeBaseInitStructure.TIM_Prescaler = psc;
- TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
- TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
- //初始化TIM3_CH2 PWM 模式
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
- TIM_OC2Init(TIM3, &TIM_OCInitStructure);
- //使能TIM3在CCR2上的预装载寄存器
- TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
- //使能TIM3
- TIM_Cmd(TIM3, ENABLE);
- }
- void TIM1_PWM_Init(u16 arr, u16 psc)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
- TIM_OCInitTypeDef TIM_OCInitSturcture;
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_TIM1, ENABLE);
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
- TIM_TimeBaseInitStructure.TIM_Period = arr;
- TIM_TimeBaseInitStructure.TIM_Prescaler = psc;
- TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
- TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0x00;
- TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStructure);
- TIM_OCInitSturcture.TIM_OCMode = TIM_OCMode_PWM2;
- TIM_OCInitSturcture.TIM_OutputState = TIM_OutputState_Enable;
- TIM_OCInitSturcture.TIM_OCPolarity = TIM_OCPolarity_High;
- TIM_OC1Init(TIM1, &TIM_OCInitSturcture);
-
- TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);
- TIM_Cmd(TIM1, ENABLE); //使能计数器
- TIM_CtrlPWMOutputs(TIM1,ENABLE); //主输出使能
- }
这里通过两个定时器输出2路PWM波。使用的计数模式都为向上计数模式。PWM模式为PWM2模式。
0QR8F~JE@77SIGEYZPF.png")
接下来在主程序中设置PWM的频率和占空比。
- int main(void)
- {
- u16 led_pwm_val=0;
- u8 dir=1;
- delay_init(); //延时函数初始化
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
- LED_Init();
- TIM3_PWM_Init(899,0); //不分频。PWM频率=72000000/900=80Khz
- TIM1_PWM_Init(899,0);
- while(1)
- {
- delay_ms(10);
- if(dir) led_pwm_val++;
- else led_pwm_val--;
-
- if(led_pwm_val>300) dir=0;
- if(led_pwm_val==0) dir=1;
- TIM_SetCompare2(TIM3,led_pwm_val);
- TIM_SetCompare1(TIM1,led_pwm_val);
- }
- }
在主函数中向初始化函数中传递两个参数,第一个参数是设置ARR值,第二个参数是设置时钟的分频系数。这里设置的ARR值为900,系统会自动给设置的值加1(因为ARR的值至少为1),所以设置值为899时,系统真正写入ARR寄存器的值是899+1,然后时钟分频系数设置为0,也就是默认时钟频率72MHz不分频。这样PWM的频率就为系统时钟除以自动装载的值。设置的PWM频率为 72MHz/900=80K。
要改变占空比时通过TIM_SetCompare()函数来设置,这个函数内部设置的就是CCR寄存器的值。
代码中设置的是CCR的值从0增加到300,然后又减到0。将PWM的输出端口接上一个LED灯,就可看到这个LED灯从亮到灭慢慢变化,实现了类似于呼吸灯的效果。
|
.png) STMCU小助手
发布时间:2022-3-19 20:46
STMCU小助手
发布时间:2022-3-19 20:46
 微信公众号
微信公众号
 手机版
手机版