14.1 USART定义
USART(Universal Synchronous/Asynchronous Receiver/Transmitter,即通用同步/异步收发器)串行通信是单片机最常用的一种通信技术,通常用于单片机和电脑之间以及单片机和单片机之间的通信。
14.2 USART串行通信协议
14.2.1 波特率和数据格式
USART通信中的同步通信功能很少用到,大多情况下只采用异步通信,只能实现异步通信功能的接口就称之为 UART。UART 通信通常以字节为单位组成数据帧,由通信收发双方根据预先约定的波特率(传输速率)进行通信。
波特率表示每秒发送二进制数据位的速率,单位是 bps,即 位/秒,波特率越高,传输速度越快,常用的 UART 通信波特率有2400,4800,9600,115200 等等。在进行串行通信之前,通信双方需要设置波特率保持一致,否则不能正常通信。
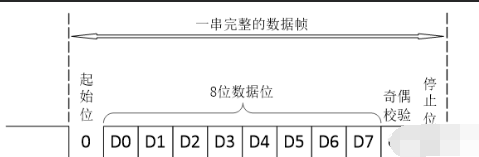
单片机标准串口进行通信时,没有数据传输时通信线路保持高电平状态。当要发送数据时,先发送一位0,用以表示开始发送,叫做起始位。然后再按照低位在前,高位在后的顺序发送8位数据。当8位数据发送完毕时,再发送一位1表示停止位。
对于接收端而言,开始时传输线路一直保持高电平,一旦检测到低电平,便准备开始接收数据。当接收完8位数据时,便检测停止位,检测完毕后,表示一帧数据发送完毕,开始准备接受下一帧数据。为了确保数据准确性,通常会在数据位之后设置校验位。
串行通信的数据帧的格式由起始位、数据位、奇偶校验位(可选)和停止位等部分组成,如图:
![{)ATF(8AY8U]A{D8M}I(GUB.png](data/attachment/forum/202204/05/202209ey0gk0kp300kmkdd.png "{)ATF(8AY8U]A{D8M}I(GUB.png")
14.2.2 TTL通信接口和RS232通信接口
电脑和单片机之间进行串口通信,通常使用USB转UART芯片,将USB通信协议转成UART协议和单片机通信。
14.3 USART配置步骤
1.时钟使能
2.设置中断分组
3.串口复位
4.GPIO初始化(TX,RX引脚)
5.设置中断分组
6.串口初始化
7.开启中断
8.使能串口
1. 新建两个文件,usart.c 和 usart.h
![[]OJ]~{CGB[$T27T%H}1@N3.png](data/attachment/forum/202204/05/202209epz0zarecuubczra.png "[]OJ]~{CGB[$T27T%H}1@N3.png")
2. 在头文件 usart.h 添加下面代码:- #ifndef _USART_H
- #define _USART_H
- #include "stdio.h"
- #include "stm32f10x.h"
- #define USART_REC_LEN 200 //定义最大接收字节数 200
- #define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收
- extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
- extern u16 USART_RX_STA; //接收状态标记
- void usart_init(u32 bound);
- #endif
![[4BJGRON~`JX8%H)Q8]0UUR.png](data/attachment/forum/202204/05/202209lgg6mbegbpgbmec6.png "[4BJGRON~`JX8%H)Q8]0UUR.png")
3. 把 usart.c 添加到工程中
![{H%V(28~w4HYQRQF$]K8C.png](data/attachment/forum/202204/05/202209ig56gc2uc7usq7zg.png "{H%V(28~w4HYQRQF$]K8C.png")
4. 在 usart.c 中添加以下代码:
- #include "usart.h"
- #pragma import(__use_no_semihosting)
- //标准库需要的支持函数
- struct __FILE
- {
- int handle;
- };
- FILE __stdout;
- //定义_sys_exit()以避免使用半主机模式
- void _sys_exit(int x)
- {
- x = x;
- }
- //重定义fputc函数
- int fputc(int ch, FILE *f)
- {
- while((USART1->SR & 0X40) == 0); //循环发送,直到发送完毕
- USART1->DR = (u8)ch;
- return ch;
- }
- #if EN_USART1_RX //如果使能了接收
- //串口1中断服务程序
- //注意,读取USARTx->SR能避免莫名其妙的错误
- u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
- //接收状态
- //bit15, 接收完成标志
- //bit14, 接收到0x0d
- //bit13~0, 接收到的有效字节数目
- u16 USART_RX_STA = 0; //接收状态标记
- void usart_init(u32 bound){
- //GPIO端口设置
- GPIO_InitTypeDef GPIO_InitStructure;
- USART_InitTypeDef USART_InitStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
- //使能USART1,GPIOA时钟
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA,ENABLE);
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置中断优先级分组
- //USART1_TX GPIOA.9
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
- GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化GPIOA.9
- //USART1_RX GPIOA.10初始化
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PA.10
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
- GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化GPIOA.10
- //Usart1 NVIC 配置
- NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3 ; //抢占优先级3
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
- NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化NVIC寄存器
- //USART 初始化设置
- USART_InitStructure.USART_BaudRate = bound; //串口波特率
- USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式
- USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
- USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
- USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
- USART_InitStructure.USART_Mode = USART_Mode_Rx|USART_Mode_Tx; //收发模式
- USART_Init(USART1,&USART_InitStructure); //初始化串口1
- USART_ITConfig(USART1,USART_IT_RXNE,ENABLE); //开启串口接受中断
- USART_Cmd(USART1,ENABLE); //使能串口1
- }
- void USART1_IRQHandler(void) //串口1中断服务程序
- {
- u8 Res;
- //接收中断(接收到的数据必须是0x0d 0x0a结尾)
- if(USART_GetITStatus(USART1,USART_IT_RXNE) != RESET)
- {
- Res = USART_ReceiveData(USART1); //读取接收到的数据
- if((USART_RX_STA & 0x8000) == 0) //接收未完成
- {
- if(USART_RX_STA & 0x4000) //接收到了0x0d
- {
- if(Res != 0x0a) USART_RX_STA = 0; //接收错误,重新开始
- else USART_RX_STA |= 0x8000; //接收完成了
- }
- else //还没收到0X0D
- {
- if(Res == 0x0d) USART_RX_STA |= 0x4000;
- else
- {
- USART_RX_BUF[USART_RX_STA & 0X3FFF] = Res;
- USART_RX_STA++;
- if(USART_RX_STA > (USART_REC_LEN - 1))USART_RX_STA = 0; //接收数据错误,重新开始接收
- }
- }
- }
- /*---- User Code Begin ----*/
- /*---- User Code End ----*/
- }
- }
- #endif

![QL}VQ#A`~~12`MZKX]38O.png](data/attachment/forum/202204/05/202210nsui4iurt7iwirc6.png "QL}VQ#A`~~12`MZKX]38O.png")

![QM1]1J[_0]IYJ{Q`MHFC@LW.png](data/attachment/forum/202204/05/202211v8jyyzmibaaeypii.png "QM1]1J[_0]IYJ{Q`MHFC@LW.png")
NTED2.png")
5. 实现USART串口通信(以printf函数为例)
- #include "stm32f10x.h"
- #include "delay.h"
- #include "led.h"
- #include "tim.h"
- #include "key.h"
- #include "pwm.h"
- #include "usart.h"
- int main(void)
- {
- delay_init();
- usart_init(115200);
- printf("USART Init Complete.\r\n");
- while(1)
- {
- printf("Hello World !\r\n");
- delay_ms(500);
- }
- }
![~F@@88S8U0SOG6K(CBHFF]8.png](data/attachment/forum/202204/05/202211lge9p3cdp5vdkd3t.png "~F@@88S8U0SOG6K(CBHFF]8.png")
测试结果:
X@J{4TBY8M27MW{F.png")
|
.png) STMCU小助手
发布时间:2022-4-5 20:21
STMCU小助手
发布时间:2022-4-5 20:21
 微信公众号
微信公众号
 手机版
手机版