一、CAN总线通信初始化配置
1. CAN总线通信初始化配置流程
CAN总线GPIO和时钟配置
CAN总线接收中断优先级配置
CAN总线初始化配置
2. CAN总线GPIO和时钟配置
CAN引脚配置

![P10HG5ZV(V(V~N6$YL1(]ES.png](data/attachment/forum/202205/03/225208biw4wi8gowocw64b.png "P10HG5ZV(V(V~N6$YL1(]ES.png")
CAN时钟配置:
![NO5_I7]74%~`$QQWH_NT{EA.png](data/attachment/forum/202205/03/225208k86k16z63v5cyal3.png "NO5_I7]74%~`$QQWH_NT{EA.png")
%U47070WW%_AUY.png")
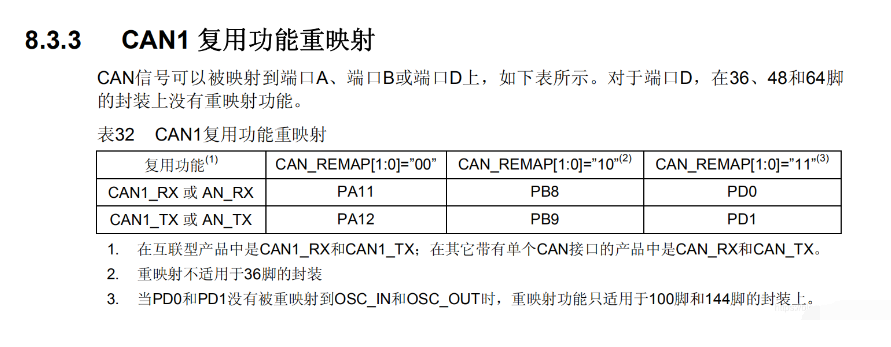
PA11和PA12引脚,CAN GPIO初始化,具体代码如下:
- /*CAN GPIO 和时钟配置 */
- void CAN_GPIO_Config(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- /*GPIOA端口时钟使能*/
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
- /* CAN1 模块时钟使能 */
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);
- /* Configure CAN pin: RX */ // PA11
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入
- GPIO_Init(GPIOA, &GPIO_InitStructure);
- /* Configure CAN pin: TX */ // PA12
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出
- GPIO_Init(GPIOA, &GPIO_InitStructure);
- }
PB8和PB9引脚,CAN GPIO初始化,具体代码如下:
- /*CAN GPIO 和时钟配置 */
- void CAN_GPIO_Config(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- /* 复用功能和GPIOB端口时钟使能*/
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO | RCC_APB2Periph_GPIOB, ENABLE);
- /* CAN1 模块时钟使能 */
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);
- /* Configure CAN pin: RX */ // PB8
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入
- GPIO_Init(GPIOB, &GPIO_InitStructure);
- /* Configure CAN pin: TX */ // PB9
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出
- GPIO_Init(GPIOB, &GPIO_InitStructure);
- //#define GPIO_Remap_CAN GPIO_Remap1_CAN1
- GPIO_PinRemapConfig(GPIO_Remap1_CAN1, ENABLE);
- }
3. CAN总线接收中断优先级配置
具体代码如下:
- /*CAN RX0 中断优先级配置 */
- void CAN_NVIC_Configuration(void)
- {
- NVIC_InitTypeDef NVIC_InitStructure;
- /* Configure the NVIC Preemption Priority Bits */
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
- /* enabling interrupt */
- NVIC_InitStructure.NVIC_IRQChannel=USB_LP_CAN1_RX0_IRQn;;
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
- NVIC_Init(&NVIC_InitStructure);
- }
4. CAN总线初始化配置
具体代码如下:
- void CAN_INIT(void)
- {
- CAN_InitTypeDef CAN_InitStructure;
- CAN_FilterInitTypeDef CAN_FilterInitStructure;
- /* CAN register init */
- CAN_DeInit(CAN1); //将外设CAN的全部寄存器重设为缺省值
- CAN_StructInit(&CAN_InitStructure);//把CAN_InitStruct中的每一个参数按缺省值填入
- /* CAN cell init */
- CAN_InitStructure.CAN_TTCM=DISABLE;//没有使能时间触发模式
- CAN_InitStructure.CAN_ABOM=DISABLE;//没有使能自动离线管理
- CAN_InitStructure.CAN_AWUM=DISABLE;//没有使能自动唤醒模式
- CAN_InitStructure.CAN_NART=DISABLE;//没有使能非自动重传模式
- CAN_InitStructure.CAN_RFLM=DISABLE;//没有使能接收FIFO锁定模式
- CAN_InitStructure.CAN_TXFP=DISABLE;//没有使能发送FIFO优先级
- CAN_InitStructure.CAN_Mode=CAN_Mode_Normal; //CAN设置为正常模式
- CAN_InitStructure.CAN_SJW=CAN_SJW_1tq; //重新同步跳跃宽度1个时间单位
- CAN_InitStructure.CAN_BS1=CAN_BS1_3tq; //时间段1为3个时间单位
- CAN_InitStructure.CAN_BS2=CAN_BS2_2tq; //时间段2为2个时间单位
- CAN_InitStructure.CAN_Prescaler=24; //时间单位长度为24 250k
- CAN_Init(CAN1,&CAN_InitStructure);
- //波特率为:36M/24(1+3+2)=0.25 即250K
- /* CAN filter init */
- CAN_FilterInitStructure.CAN_FilterNumber=1;//指定过滤器为1
- CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;//指定过滤器为标识符屏蔽位模式
- CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit;//过滤器位宽为32位
- CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000;// 过滤器标识符的高16位值
- CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;// 过滤器标识符的低16位值
- CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;//过滤器屏蔽标识符的高16位值
- CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;// 过滤器屏蔽标识符的低16位值
- CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_FIFO0;// 设定了指向过滤器的FIFO为0
- CAN_FilterInitStructure.CAN_FilterActivation=ENABLE;// 使能过滤器
- CAN_FilterInit(&CAN_FilterInitStructure);// 按上面的参数初始化过滤器
- /* CAN FIFO0 message pending interrupt enable */
- CAN_ITConfig(CAN1,CAN_IT_FMP0, ENABLE); //使能FIFO0消息挂号中断
- }
二、CAN总线通信——波特率计算
1. CAN总线时间特性
同步段(SYNC_SEG):通常期望位的变化发生在该时间段内。其值固定为1个时间单元(1 x tCAN)。
时间段1(BS1):定义采样点的位置。它包含CAN标准里的PROP_SEG和PHASE_SEG1。其值可以编程为1到16个时间单元,但也可以被自动延长,以补偿因为网络中不同节点的频率差异所造成的相位的正向漂移。
时间段2(BS2):定义发送点的位置。它代表CAN标准里的PHASE_SEG2。其值可以编程为1到8个时间单元,但也可以被自动缩短以补偿相位的负向漂移。
![GMOO5VVLO[FLC9U6]W{ZH.png](data/attachment/forum/202205/03/225208ac1kdwpzdehsvwsi.png "GMOO5VVLO[FLC9U6]W{ZH.png")
2. 波特率计算公式
CAN波特率=APB1时钟频率/BRP分频器/(1+tBS1+tBS2)
一般APB1时钟频率为36Mhz。如下图常见CAN总线的波特率设置。

![Z[5DG6T[ZC]06389K9H3}QI.png](data/attachment/forum/202205/03/225208rbhbuh8dhulu6lzb.png "Z[5DG6T[ZC]06389K9H3}QI.png")
3. CAN波特率有关的寄存器
O$QUG.png")
[4D(KIZN1.png")
|
.png) STMCU小助手
发布时间:2022-5-4 22:00
STMCU小助手
发布时间:2022-5-4 22:00
 微信公众号
微信公众号
 手机版
手机版