01. 简介
我们已经了解了FreeRTOS,接下来我们就把FreeRTOS移植到我们所使用的平台上,我们使用的板子是STM32F407。
02. 预备工作
要移植FreeRTOS,肯定需要一个基础工程,基础工程越简单越好,我们就用之前的跑马灯实验作为基础工程。
下载好FreeRTOS源码
03. FreeRTOS移植
3.1 创建FreeRTOS文件夹
}CADG2RL3Z7C56F.png")
3.2 将FreeRTOS的源码添加到FreeRTOS目录中
FreeRTOSv10.4.1\FreeRTOS\Source
![{V4TDKKZ2E`AU)KP]HTY~I2.png](data/attachment/forum/202206/17/140559tm8yssw3jump9w3a.png "{V4TDKKZ2E`AU)KP]HTY~I2.png")
3.3 删除portable文件夹中相关的文件和目录
我们只需要留下keil、MemMang和RVDS这三个文件夹,其余的都可以删除的。

3.4 向工程分组中添加文件
打开基础工程,新建分组FreeRTOS_CORE和FreeRTOS_PORTABLE,然后向这两个分组中添加文件。

FreeRTOS_CORE中的文件就在FreeRTOS目录中。FreeRTOS_PORTABLE分组中的port.c和heap_4.c是怎么来的呢?port.c是RVDS文件夹下的ARM_CM4F中的文件,因为STM32F407是Cortex-M4内核并且带有FPU,因此要选择ARM_CM4F中的port.c文件。heap_4.c是MemMang文件夹中的,里面有5个c文件:heap_1.c,heap_2.c,heap_3.c,heap_4.c,heap_5.c。这5个c文件是五种不同的内存管理方法。
这5个文件都可以用来作为FreeRTOS的内存管理文件,只是它们的实现原理不同,各有利弊。后面我们再来讨论FreeRTOS的内存管理。
3.5 添加响应的头文件路径
![{BKC5M]ZD5@P1DLI]MOK{AA.png](data/attachment/forum/202206/17/140558bzk6flduf4evvzf8.png "{BKC5M]ZD5@P1DLI]MOK{AA.png")
3.6 找不到头文件的错误- ..\FreeRTOS\croutine.c(27): error: #5: cannot open source input file "FreeRTOS.h": No such file or directory
解决办法
FreeRTOS.h头文件在FreeRTOS\include目录中。
4M4A6TT4R1GC~[X.png")
再次编译发现又有头文件找不到FreeRTOSConfig.h文件
- ..\FreeRTOS\include\FreeRTOS.h(57): error: #5: cannot open source input file "FreeRTOSConfig.h": No such file or directory
在项目文件中搜索该头文件发现找不到,这个时候我们可以找找FreeRTOS的官方移植工程汇总会不会有这个文件,打开FreeRTOS针对STM32F407的移植工程文件,文件夹是H:\02_stm32\其它资料\FreeRTOS\FreeRTOSv10.4.1\FreeRTOS\Demo\CORTEX_M4F_STM32F407ZG-SK。

找到该文件之后,我们直接将它复制到FreeRTOS源码中的include文件夹下。FreeRTOSConfig.h文件是配置文件,一般的操作系统都有裁剪、配置功能,而这些裁剪及配置都是通过一个文件来完成的,基本都是通过宏定义来完成对系统的配置和裁剪的。
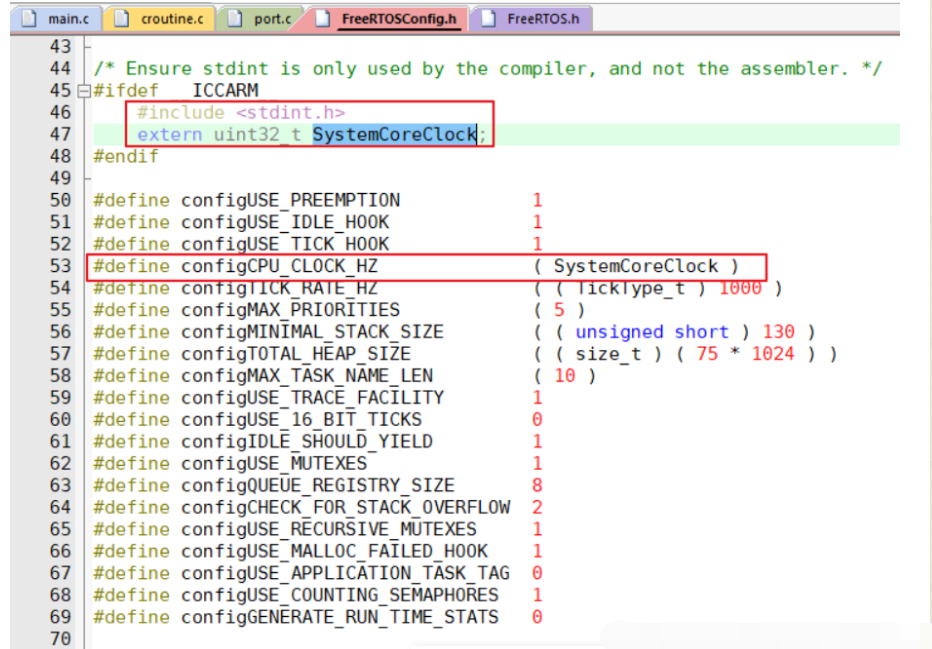
3.7 SystemCoreClock没有定义的错误
- ..\FreeRTOS\portable\RVDS\ARM_CM4F\port.c(732): error: #20: identifier "SystemCoreClock" is undefined
SystemCoreClock未定义,因为在FreeRTOSConfig.h中使用了SystemCoreClock来标记MCU的频率。
![R}})9]N4BSC_24~}KZO]9NB.png](data/attachment/forum/202206/17/140558y66a566hxx4sszgg.png "R}})9]N4BSC_24~}KZO]9NB.png")
这是一个条件编译,只有定义了__ICCARM__以后下边的代码才有效。
- /* Ensure stdint is only used by the compiler, and not the assembler. */
- #ifdef __ICCARM__
- #include <stdint.h>
- extern uint32_t SystemCoreClock;
- #endif
修改这个条件编译,修改后的代码如下:
- /* Ensure stdint is only used by the compiler, and not the assembler. */
- #if defined(__ICCARM__) || defined(__CC_ARM) || defined(__GNUC__)
- #include <stdint.h>
- extern uint32_t SystemCoreClock;
- #endif
3.8 重复定义的错误- ..\OBJ\01Test.axf: Error: L6200E: Symbol PendSV_Handler multiply defined (by port.o and stm32f4xx_it.o).
- ..\OBJ\01Test.axf: Error: L6200E: Symbol SVC_Handler multiply defined (by port.o and stm32f4xx_it.o).
- ..\OBJ\01Test.axf: Error: L6200E: Symbol SysTick_Handler multiply defined (by port.o and stm32f4xx_it.o).
port.c和stm32f4xx_it.c两个文件中有重复定义的函数:PendSV_Handler(), SVC_Handler(), SysTick_Handler()。屏蔽掉stm32f4xx_it.c中的PendSV_Handler(), SVC_Handler(), SysTick_Handler()三个函数。再次编译,发现如下未定义错误。
3.9 未定义错误
- Build started: Project: 01Test
- *** Using Compiler 'V5.06 update 6 (build 750)', folder: 'D:\Keil_v5\ARM\ARMCC\Bin'
- Build target '01Test'
- compiling stm32f4xx_it.c...
- linking...
- ..\OBJ\01Test.axf: Error: L6218E: Undefined symbol vApplicationIdleHook (referred from tasks.o).
- ..\OBJ\01Test.axf: Error: L6218E: Undefined symbol vApplicationStackOverflowHook (referred from tasks.o).
- ..\OBJ\01Test.axf: Error: L6218E: Undefined symbol vApplicationTickHook (referred from tasks.o).
- ..\OBJ\01Test.axf: Error: L6218E: Undefined symbol vApplicationMallocFailedHook (referred from heap_4.o).
- Not enough information to list image symbols.
- Not enough information to list load addresses in the image map.
- Finished: 2 information, 0 warning and 4 error messages.
- "..\OBJ\01Test.axf" - 4 Error(s), 0 Warning(s).
- Target not created.
- Build Time Elapsed: 00:00:05
发现这些未定义的函数,它们都是Hook结尾的,这些函数有个共同的名称:钩子函数,这是因为在FreeRTOSConfig.h中开启了这些钩子函数,但是没有定义这些钩子函数导致的。我们在FreeRTOSConfig.h中关闭这些钩子函数就行了,关闭的方法很简单,将相应的宏定义改为0即可。这里将宏configUSE_IDLE_HOOK、configUSE_TICK_HOOK、configUSE_MALLOC_FAILED_HOOK和configCHECK_FOR_STACK_OVERFLOW定义为0。
最后编译一下,应该就没有错误了,如果还有错误的话大家自行根据错误类型查找和修改错误。
04. SYSTEM文件修改
4.1 修改sys.h文件
使用FreeRTOS,我们应该将宏SYSTEM_SUPPORT_OS改为1。- //0,不支持ucos
- //1,支持ucos
- #define SYSTEM_SUPPORT_OS 1 //定义系统文件夹是否支持OS
4.2 修改usart.c文件
usart.c文件修改也很简单,usart.c文件有两部分要修改,一个是添加FreeRTOS.h头文件,默认是添加的UCOS中的includes.h头文件。修改之后内容如下:
- //如果使用ucos,则包括下面的头文件即可.
- #if SYSTEM_SUPPORT_OS
- #include "FreeRTOS.h" //os使用
- #endif
修改USART1中的中断服务函数,在使用UCOS的时候需要进出中断的时候添加OSIntEnter()和OSIntExit()。使用FreeRTOS的话就不需要了,所以将这两行代码删除即可。
- void USART1_IRQHandler(void) //串口1中断服务程序
- {
- u8 Res;
- if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
- {
- Res =USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据
-
- if((USART_RX_STA&0x8000)==0)//接收未完成
- {
- if(USART_RX_STA&0x4000)//接收到了0x0d
- {
- if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
- else USART_RX_STA|=0x8000; //接收完成了
- }
- else //还没收到0X0D
- {
- if(Res==0x0d)USART_RX_STA|=0x4000;
- else
- {
- USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
- USART_RX_STA++;
- if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
- }
- }
- }
- }
- }
4.3 修改delay.c文件
delay.c文件修改的就比较大了,因为涉及到FreeRTOS的系统时钟,delay.c文件里面有4个函数。
首先来看看SysTick_Handler(),次函数是滴答定时器的中断服务函数,代码如下:
- extern void xPortSysTickHandler(void);
- //systick中断服务函数,使用OS时用到
- void SysTick_Handler(void)
- {
- if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行
- {
- xPortSysTickHandler();
- }
- }
delay_init()是用来初始化滴答定时器和延时函数,代码如下:
- //初始化延迟函数
- //SYSTICK的时钟固定为AHB时钟,基础例程里面SYSTICK时钟频率为AHB/8
- //这里为了兼容FreeRTOS,所以将SYSTICK的时钟频率改为AHB的频率!
- //SYSCLK:系统时钟频率
- void delay_init(u8 SYSCLK)
- {
- u32 reload;
- SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK);
- fac_us=SYSCLK; //不论是否使用OS,fac_us都需要使用
- reload=SYSCLK; //每秒钟的计数次数 单位为M
- reload*=1000000/configTICK_RATE_HZ; //根据configTICK_RATE_HZ设定溢出时间
- //reload为24位寄存器,最大值:16777216,在168M下,约合0.0998s左右
- fac_ms=1000/configTICK_RATE_HZ; //代表OS可以延时的最少单位
- SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk;//开启SYSTICK中断
- SysTick->LOAD=reload; //每1/configTICK_RATE_HZ断一次
- SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //开启SYSTICK
- }
延时函数定义如下:
- //延时nus
- //nus:要延时的us数.
- //nus:0~204522252(最大值即2^32/fac_us@fac_us=168)
- void delay_us(u32 nus)
- {
- u32 ticks;
- u32 told,tnow,tcnt=0;
- u32 reload=SysTick->LOAD; //LOAD的值
- ticks=nus*fac_us; //需要的节拍数
- told=SysTick->VAL; //刚进入时的计数器值
- while(1)
- {
- tnow=SysTick->VAL;
- if(tnow!=told)
- {
- if(tnow<told)tcnt+=told-tnow; //这里注意一下SYSTICK是一个递减的计数器就可以了.
- else tcnt+=reload-tnow+told;
- told=tnow;
- if(tcnt>=ticks)break; //时间超过/等于要延迟的时间,则退出.
- }
- };
- }
- //延时nms
- //nms:要延时的ms数
- //nms:0~65535
- void delay_ms(u32 nms)
- {
- if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行
- {
- if(nms>=fac_ms) //延时的时间大于OS的最少时间周期
- {
- vTaskDelay(nms/fac_ms); //FreeRTOS延时
- }
- nms%=fac_ms; //OS已经无法提供这么小的延时了,采用普通方式延时
- }
- delay_us((u32)(nms*1000)); //普通方式延时
- }
- //延时nms,不会引起任务调度
- //nms:要延时的ms数
- void delay_xms(u32 nms)
- {
- u32 i;
- for(i=0;i<nms;i++) delay_us(1000);
- }
编译之后出现如下错误
- ..\OBJ\01Test.axf: Error: L6200E: Symbol SysTick_Handler multiply defined (by port.o and delay.o).
在port.c和delay.c中有重复定义的函数,SysTick_Handler只能二选一,很明显delay.c中的SysTick_Handler()保留下来,打开FreeRTOSConfig.h文件,找到如下宏定义:
- #define xPortSysTickHandler SysTick_Handler
注释上面的宏定义。
05. 测试程序设计
main.c文件
- #include "sys.h"
- #include "delay.h"
- #include "usart.h"
- #include "led.h"
- #include "FreeRTOS.h"
- #include "task.h"
- //任务优先级
- #define START_TASK_PRIO 1
- //任务堆栈大小
- #define START_STK_SIZE 128
- //任务句柄
- TaskHandle_t StartTask_Handler;
- //任务函数
- void start_task(void *pvParameters);
- //任务优先级
- #define LED0_TASK_PRIO 2
- //任务堆栈大小
- #define LED0_STK_SIZE 50
- //任务句柄
- TaskHandle_t LED0Task_Handler;
- //任务函数
- void led0_task(void *pvParameters);
- //任务优先级
- #define LED1_TASK_PRIO 3
- //任务堆栈大小
- #define LED1_STK_SIZE 50
- //任务句柄
- TaskHandle_t LED1Task_Handler;
- //任务函数
- void led1_task(void *pvParameters);
- //任务优先级
- #define FLOAT_TASK_PRIO 4
- //任务堆栈大小
- #define FLOAT_STK_SIZE 128
- //任务句柄
- TaskHandle_t FLOATTask_Handler;
- //任务函数
- void float_task(void *pvParameters);
- int main(void)
- {
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组4
- delay_init(168); //初始化延时函数
- uart_init(115200); //初始化串口
- LED_Init(); //初始化LED端口
-
- //创建开始任务
- xTaskCreate((TaskFunction_t )start_task, //任务函数
- (const char* )"start_task", //任务名称
- (uint16_t )START_STK_SIZE, //任务堆栈大小
- (void* )NULL, //传递给任务函数的参数
- (UBaseType_t )START_TASK_PRIO, //任务优先级
- (TaskHandle_t* )&StartTask_Handler); //任务句柄
- vTaskStartScheduler(); //开启任务调度
- }
- //开始任务任务函数
- void start_task(void *pvParameters)
- {
- taskENTER_CRITICAL(); //进入临界区
- //创建LED0任务
- xTaskCreate((TaskFunction_t )led0_task,
- (const char* )"led0_task",
- (uint16_t )LED0_STK_SIZE,
- (void* )NULL,
- (UBaseType_t )LED0_TASK_PRIO,
- (TaskHandle_t* )&LED0Task_Handler);
- //创建LED1任务
- xTaskCreate((TaskFunction_t )led1_task,
- (const char* )"led1_task",
- (uint16_t )LED1_STK_SIZE,
- (void* )NULL,
- (UBaseType_t )LED1_TASK_PRIO,
- (TaskHandle_t* )&LED1Task_Handler);
- //浮点测试任务
- xTaskCreate((TaskFunction_t )float_task,
- (const char* )"float_task",
- (uint16_t )FLOAT_STK_SIZE,
- (void* )NULL,
- (UBaseType_t )FLOAT_TASK_PRIO,
- (TaskHandle_t* )&FLOATTask_Handler);
- vTaskDelete(StartTask_Handler); //删除开始任务
- taskEXIT_CRITICAL(); //退出临界区
- }
- //LED0任务函数
- void led0_task(void *pvParameters)
- {
- while(1)
- {
- LED0=~LED0;
- vTaskDelay(500);
- }
- }
- //LED1任务函数
- void led1_task(void *pvParameters)
- {
- while(1)
- {
- LED1=0;
- vTaskDelay(200);
- LED1=1;
- vTaskDelay(800);
- }
- }
- //浮点测试任务
- void float_task(void *pvParameters)
- {
- static float float_num=0.00;
- while(1)
- {
- float_num+=0.01f;
- printf("float_num的值为: %.4f\r\n",float_num);
- vTaskDelay(1000);
- }
- }
实验结果:
LED0和LED1开始闪烁,LED0均匀闪烁,LED1亮的时间短,灭的时间长。然后串口不断有数据输出。
|
.png) STMCU小助手
发布时间:2022-6-17 14:05
STMCU小助手
发布时间:2022-6-17 14:05
 微信公众号
微信公众号
 手机版
手机版