.png) STMCU小助手
发布时间:2022-8-1 22:01
STMCU小助手
发布时间:2022-8-1 22:01
|
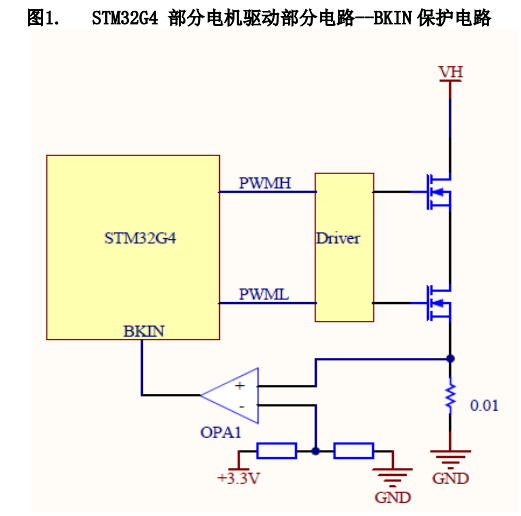
1. 前言 在使用 STM32 Advanced Timer 用于工业控制,比如电机驱动,电源应用等诸多应用场合,除了 PWM 波互补输出功能外,break 功能,或者叫做刹车功能/断路功能基本都会涉及到,正确的使用这个功能是此类应用中必备的。本文将针对 break 功能做细致说明,方便PWM 驱动使用者更好去应用 break 功能。 2. Break 基本功能说明 Break 功能主要用于快速硬件保护,功率驱动往往使用 Advanced Timer(如 TIM1,TIM8)的 PWM 波进行外部驱动,进行功率开关控制,当出现了过流,过压的使用情况下,需要快速关闭外部输出,达到保护功率电路的目的,如果不能快速关断,可能会导致功率管,如 MOSFET,IGBT 的损坏,典型应用电路如下图所示。 
Break 功能一般与比较器共同使用,比较器将模拟信号转换为数字信号,而 break 功能则接收数字信号进行 PWM 封波的操作,其作用在高级定时器的最终输出端。 2.1. Break 输入源说明 STM32G4 的 Break 有两个 TIM_BKIN,TIM_BKIN2,分别对应于不同的输入源,相比较而言,BKIN 比 BKIN2 多一个系统输入源。 ![VD3IZI8X{`@UF57)M]ZQ~B5.png](data/attachment/forum/202208/01/220138ur7jgrfr9755ov92.png "VD3IZI8X{`@UF57)M]ZQ~B5.png")
系统输入源如下,需要对 SYSCFG_CFGR2 进行配置 ![CUH6D`4{O(FE_F]%5SY820Z.png](data/attachment/forum/202208/01/220138ozklcliki5d9dael.png "CUH6D`4{O(FE_F]%5SY820Z.png")
管脚输入以及比较器输入如下, 
说明:比如 TIM1 的外部管脚输入的 TIM1_BKIN pin 可以是 PA6,PA14,PA15,PB8,PB10,PB12,PC13,PE15 中任意一个外部管脚。 软件输入则指的是 TIMx_EGR 中的 BG 和 BG2,设定为 1 时候,直接产生 break. ![M72FHIQ5Z0$IPUQ]A%8P3TP.png](data/attachment/forum/202208/01/220138g3v2w088fr6rr98i.png "M72FHIQ5Z0$IPUQ]A%8P3TP.png")
完整版请查看:附件 |

LAT1076 STM32G4 Advanced Timer Break功能详解_v1.0.pdf
下载632.96 KB, 下载次数: 11
STM32G47x 双 Bank 模式下在线升级
【经验分享】STM32G4之基本定时器
NUCLEO-G474RE 扩展 LSM6DSO 传感器数据融合实操演示全解析
经验分享 | STM32G474 高精度定时器同步功能全解析 从内部互联到多芯片协同的实现方案
经验分享 | STM32G4双BANK启动应用演示
STM32G4 LPTIM+DMAMUX 实现并行输出应用示例
实战经验 | LAT1578 SAU对NSC分区的影响
经验分享 | STM32G474 HRTIM Triggered-half模式实现两相交错电源180°相位同步方案
STM32大神笔记,超详细单片机学习汇总资料
经验分享 | 为什么重启ADC的DMA传输要先停掉ADC?
 微信公众号
微信公众号
 手机版
手机版