一. TB6612驱动
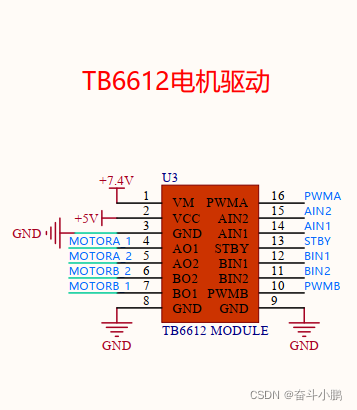
下图就是TB6612模块的详细原理图,这里只对如何使用进行讲解,不讲解其内部原理

1.可以同时驱动两个电机AB.2.PWMA/PWMB为两个电机提供pwm脉冲。
3.AIN1/AIN2,BIN1/BIN2.控制电机的正反转和停止。
![ZT_9J]}TXU2BWW3JD3FXU)R.png](data/attachment/forum/202208/19/180029ly7jhph9w5evihyy.png "ZT_9J]}TXU2BWW3JD3FXU)R.png")
4.STBY可以理解为一个使能端口,高电平有效。
使用方法为 : STBY高电平,提供pwm脉冲,设置A/BIN控制正反转。
二. stm32代码实现
1. 产生pwm脉冲
可以通过定时器产生,通过定时器可以产生四路pwm信号,然后通过设置CCR的值来控制占空比以控制速度的大小(和呼吸灯差不多)。
- GPIO_InitTypeDef GPIO_initStructure; //输出pwm端口的GPIO初始化
- TIM_TimeBaseInitTypeDef TIM_TimeBase_InitStructure; //设置TIM定时器的相关参数,进行初始化
- TIM_OCInitTypeDef TIM_OCInitStructure; //但是定时器通道信息
2. 初始化其他端口
剩下的端口就是普通的GPIO端口了,只需要对其进行初始化就可以了。
然后对TIM->CCR进行赋值就可以控制电机的速度了。
复用,JTAG失能等等这些根据具体的原理图来添加。
完整代码
- void pwm_init(void)
- {
- GPIO_InitTypeDef GPIO_initStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBase_InitStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
-
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO,ENABLE);
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
-
-
- GPIO_initStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
- GPIO_initStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_initStructure.GPIO_Speed = GPIO_Speed_50MHz;
-
- GPIO_Init(GPIOA,&GPIO_initStructure);
-
-
- TIM_TimeBase_InitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
- TIM_TimeBase_InitStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBase_InitStructure.TIM_Period = 7200-1;
- TIM_TimeBase_InitStructure.TIM_Prescaler = 0;
-
- TIM_TimeBaseInit(TIM2,&TIM_TimeBase_InitStructure);
-
-
- TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset;
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
- TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
- TIM_OCInitStructure.TIM_Pulse = 0;
-
- TIM_OC1Init(TIM2,&TIM_OCInitStructure);
- TIM_OC1PreloadConfig(TIM2,TIM_OCPreload_Enable);
-
- TIM_OC2Init(TIM2,&TIM_OCInitStructure);
- TIM_OC2PreloadConfig(TIM2,TIM_OCPreload_Enable);
-
- TIM_ARRPreloadConfig(TIM2,ENABLE);
- TIM_Cmd(TIM2,ENABLE);
-
-
- TIM2->CCR1 = 0;
- TIM2->CCR2 = 0;
-
- }
- void driver_pin_init(void)
- {
- GPIO_InitTypeDef GPIO_initStructure;
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB,ENABLE);
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
- GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);
-
- GPIO_initStructure.GPIO_Mode = GPIO_Mode_Out_PP;
- GPIO_initStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_initStructure.GPIO_Pin = AIN1_pin | AIN2_pin;
-
- GPIO_Init(GPIOA,&GPIO_initStructure);
-
-
- GPIO_initStructure.GPIO_Mode = GPIO_Mode_Out_PP;
- GPIO_initStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_initStructure.GPIO_Pin = BIN1_pin | BIN2_pin;
-
- GPIO_Init(GPIOB,&GPIO_initStructure);
-
-
- GPIO_initStructure.GPIO_Mode = GPIO_Mode_Out_PP;
- GPIO_initStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_initStructure.GPIO_Pin = STBY_pin;
-
- GPIO_Init(STBY_port,&GPIO_initStructure);
-
- STBY_HIGH;
-
- AIN1_HIGH;
- AIN2_Low;
-
-
- BIN1_HIGH;
- BIN2_Low;
-
- }
|
.png) STMCU小助手
发布时间:2022-8-21 17:00
STMCU小助手
发布时间:2022-8-21 17:00
 微信公众号
微信公众号
 手机版
手机版