.png) STMCU小助手
发布时间:2022-8-21 18:00
STMCU小助手
发布时间:2022-8-21 18:00
|
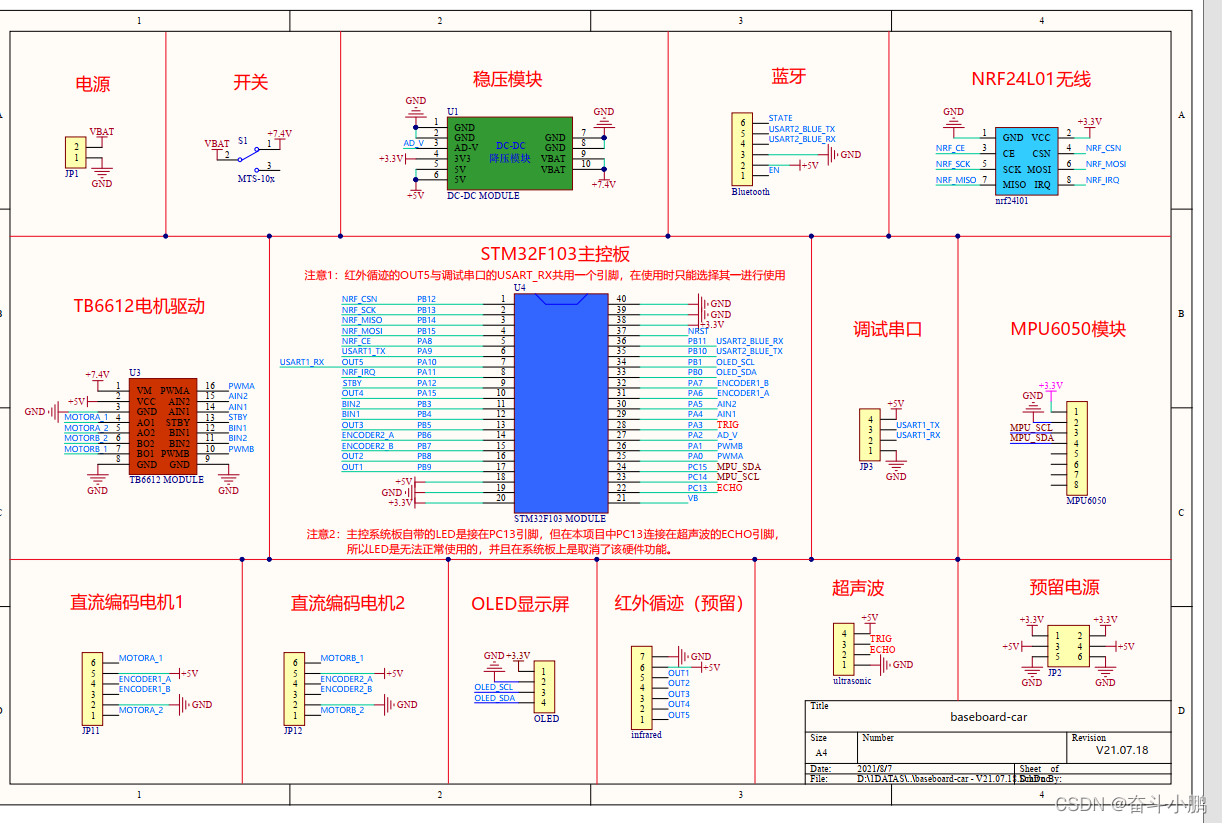
硬件配置 采用stm32F103C8T6核心板,搭配MPU6050陀螺仪和两个电机带有AB相的编码,通过这就可以组建一台最小的STM32平衡车了。 当然为了可以方便控制以及显示对应的数据,方便调试以及理解MPU6050的相关数据,往往会搭配一个OLED和蓝牙模块。 ** 
** 代码部分 本次介绍的是淘宝卖家提供的源码,里面包含了所有模块,眨眼一看还是比较复杂的,但是去除扩展模块与平衡车关联性不大的代码文件后,整个代码还是非常简介的。削减后的代码文件将在后面给出 整个项目执行的顺序都在这个滴答定时器的中断里面执行,流程清晰可见。涉及到PID算法的是ctr_bal,ctr_vel,ctr_turn三个函数,分别是平衡,速度,转向控制。 如果之前有熟悉MPU6050模块和PID算法的话,平衡车的实现将会上非常轻松的。 
|
【福利三:逢7发帖赢大礼】想要充分利用STM32H743VI片内的RAM空间(但并不顺利)
基于stm32平台上的IC-MU磁绝对值编码器SPI通讯和码盘数据处理
使用STM32 MCU和MPU连接PDM数字麦克风
分享STM32资料-采用 STM32U031R8 MCU 的 STM32 Nucleo-64 开发板,官方资料,数据手册等资料
HRTIM 指南
使用 STM32 的 DWT 单元监控内存
DAC,COMP,HRTIM Fault 功能的使用
一个软件引起的 LSE 驱动不良的问题
STM32 GUI LTDC 最大像素时钟评估方法
STM32 Cordic 运算速度评估
 微信公众号
微信公众号
 手机版
手机版