在上新建工程的基础上添加使用SPI功能(新建工程见STM32使用LL库建立工程)
一、CubeMX的配置
1、非SPI的LCD控制IO口的配置
查看原理图可以看到,有5个引脚接在了MCU上,其中有两个SPI引脚,三个LCD控制引脚

其引脚对照表如下,所以我们先将PC6、PC7、PB15配置为通用IO推挽输出


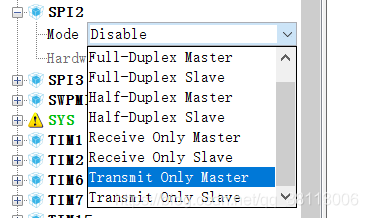
2、SPI的的配置
MCU只需要通过SPI向LCD控制器发送命令/数据即可,所以只使用 SPI2 的 SCK 和 MOSI 引脚,将SPI2配置为主设备只发送模式,接下来开始配置SPI2接口:
首先将SPI2配置为只发送主设备模式

可以看到,SPI2_SCK引脚默认为PB10,我们需要将其修改为PB13

然后对SPI的参数进行配置

然后重要的是工程设置里,将HAL改成LL

然后便可以生成代码

二、用户代码修改
将SPI初始化代码修改为如下,放入新建的spi.c文件
- //SPI2初始化代码,配置成主设备只发送模式
- void SPI2_Init(void)
- {
- LL_SPI_InitTypeDef SPI_InitStruct;
- LL_GPIO_InitTypeDef GPIO_InitStruct;
- LL_AHB2_GRP1_EnableClock(LL_AHB2_GRP1_PERIPH_GPIOB);//使能GPIOB时钟
- LL_AHB2_GRP1_EnableClock(LL_AHB2_GRP1_PERIPH_GPIOC);//使能GPIOC时钟
- LL_APB1_GRP1_EnableClock(LL_APB1_GRP1_PERIPH_SPI2); //使能SPI2时钟
- // **LCD控制GPIO配置 LCD_PWR->PB15 LCD_WR_RS PC6 LCD_RST->PC7 */
- GPIO_InitStruct.Pin = LL_GPIO_PIN_15;
- GPIO_InitStruct.Mode = LL_GPIO_MODE_OUTPUT;
- GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_LOW;
- GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
- GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
- LL_GPIO_Init(GPIOB, &GPIO_InitStruct);
- LL_GPIO_ResetOutputPin(GPIOB, LL_GPIO_PIN_15);
- GPIO_InitStruct.Pin = LL_GPIO_PIN_6|LL_GPIO_PIN_7;
- LL_GPIO_Init(GPIOC, &GPIO_InitStruct);
- LL_GPIO_ResetOutputPin(GPIOC, LL_GPIO_PIN_6|LL_GPIO_PIN_7);
-
- // **SPI2 GPIO Configuration PC3-> SPI2_MOSI PB13-> SPI2_SCK */
- GPIO_InitStruct.Pin = LL_GPIO_PIN_13;
- GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
- GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH;
- GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
- GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
- GPIO_InitStruct.Alternate = LL_GPIO_AF_5;
- LL_GPIO_Init(GPIOB, &GPIO_InitStruct);
-
- GPIO_InitStruct.Pin = LL_GPIO_PIN_3;
- LL_GPIO_Init(GPIOC, &GPIO_InitStruct);
- /* SPI2 parameter configuration*/
- SPI_InitStruct.TransferDirection = LL_SPI_FULL_DUPLEX; //全双工
- SPI_InitStruct.Mode = LL_SPI_MODE_MASTER; //主设备模式
- SPI_InitStruct.DataWidth = LL_SPI_DATAWIDTH_8BIT; //8位数据宽度
- SPI_InitStruct.ClockPolarity = LL_SPI_POLARITY_HIGH; //串行同步时钟的空闲状态为高电平
- SPI_InitStruct.ClockPhase = LL_SPI_PHASE_2EDGE; //串行同步时钟的第二个跳变沿数据被采样
- SPI_InitStruct.NSS = LL_SPI_NSS_SOFT; //NSS信号由软件(使用SSI位)管理:内部NSS信号由SSI位控制
- SPI_InitStruct.BaudRate = LL_SPI_BAUDRATEPRESCALER_DIV2;//定义波特率预分频的值:波特率预分频值为256
- SPI_InitStruct.BitOrder = LL_SPI_MSB_FIRST; //数据传输从MSB位开始
- SPI_InitStruct.CRCCalculation = LL_SPI_CRCCALCULATION_DISABLE;//关闭硬件CRC校验
- SPI_InitStruct.CRCPoly = 7; //CRC值计算的多项式
- LL_SPI_Init(SPI2, &SPI_InitStruct);
- LL_SPI_SetStandard(SPI2, LL_SPI_PROTOCOL_MOTOROLA); //SPI帧格式 为 SPI Motorola模式
- LL_SPI_DisableNSSPulseMgt(SPI2); //关闭 NSS脉冲模式
- LL_SPI_Enable(SPI2); //使能SPI2
- }
然后编写SPI2_WriteByte(u8 *TxData,u16 size)函数
- /**
- * @brief SPI3 写入一个字节
- * @param TxData 要写入的字节
- * @param size 写入字节大小
- * @return u8 0:写入成功,其他:写入失败
- */
- u8 SPI2_WriteByte(u8 *TxData,u16 size)
- {
- u8 retry=0;
- u8 n=0;
- for(n=0;n<size;n++)
- {
- while (LL_SPI_IsActiveFlag_TXE(SPI2) == RESET) //检查指定的SPI标志位设置与否:发送缓存空标志位
- {
- retry++;
- if(retry>200)return retry;
- }
- LL_SPI_TransmitData8(SPI2, TxData[n]); //通过外设SPIx发送一个数据
- }
-
- return 0;
- }
三、LCD代码移植
BearPi和正点原子的Pandora开发板使用的LCD是同一款,且模式配置也一样,所以既然有现成的代码,我们不妨copy一下,将lcd.c和lcd.h复制过来
然后修改lcd.h里的LCD控制GPIO代码
- /*
- LCD_PWR: PB15
- LCD_RST: PC7
- LCD_DC: PC6
- */
- #define LCD_PWR(n) (n?LL_GPIO_SetOutputPin(GPIOB, LL_GPIO_PIN_15):LL_GPIO_ResetOutputPin(GPIOB, LL_GPIO_PIN_15))
- #define LCD_RST(n) (n?LL_GPIO_SetOutputPin(GPIOC, LL_GPIO_PIN_7 ):LL_GPIO_ResetOutputPin(GPIOC, LL_GPIO_PIN_7))
- #define LCD_DC(n) (n?LL_GPIO_SetOutputPin(GPIOC, LL_GPIO_PIN_6 ):LL_GPIO_ResetOutputPin(GPIOC, LL_GPIO_PIN_6))
将lcd.c里的LCD_Gpio_Init()代码删去,然后在LCD_Init()开头添加如下代码:
- SPI2_Init();
-
- LCD_PWR(0); //关闭显示
- LCD_RST(0);
- delay_ms(120);
- LCD_RST(1); //复位
在主函数里写入
- LCD_Init(); //初始化LCD
-
- POINT_COLOR = RED;
- LCD_ShowString(0, 100, 240, 32, 32, "BearPi STM32L4");
编译链接下载到开发板里,测试结果如下

表明测试成功
————————————————
转载:Willliam_william
|
.png) STMCU小助手
发布时间:2022-8-27 14:53
STMCU小助手
发布时间:2022-8-27 14:53
 微信公众号
微信公众号
 手机版
手机版