.png) STMCU小助手
发布时间:2022-9-5 21:35
STMCU小助手
发布时间:2022-9-5 21:35
|
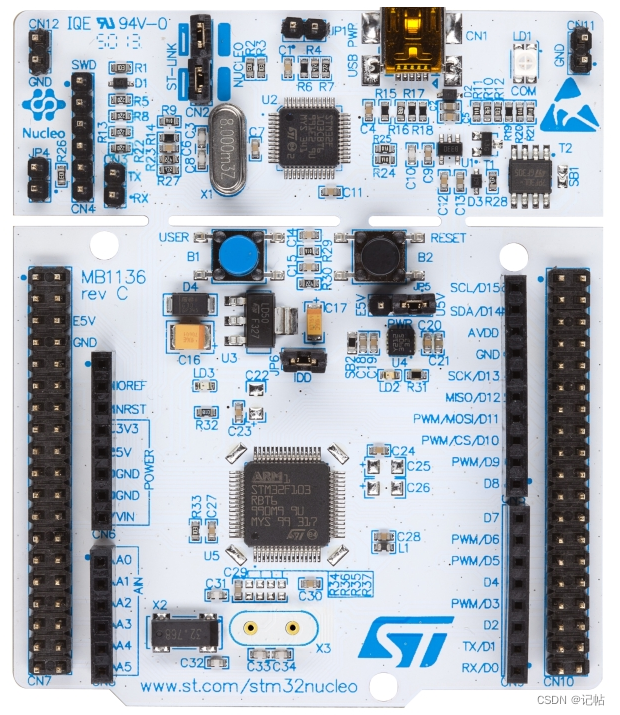
生成例程 使用STM32CUBEMX生成例程,这里使用NUCLEO-F103RB开发板 
查看原理图,PA2和PA3设置为开发板的串口。 
配置串口。 
开启中断。 
查看原理图,Arduino的接口A0-A5都是AD口。 
ADC通道配置 
ADC1配置。 
ADCs_Common_Settings: Mode:Independent mod 独立 ADC 模式,当使用一个 ADC 时是独立模式,使用两个 ADC 时是双模式,在双模式下还有很多细分模式可选,具体配置 ADC_CR1  UALMOD 位。 UALMOD 位。ADC_Settings: Data Alignment: Right alignment 转换结果数据右对齐,一般我们选择右对齐模式。 Left alignment 转换结果数据左对齐。 Scan Conversion Mode: Disabled 禁止扫描模式。如果是单通道 AD 转换使用 DISABLE。 Enabled 开启扫描模式。如果是多通道 AD 转换使用 ENABLE。 Continuous Conversion Mode: Disabled 单次转换。转换一次后停止需要手动控制才重新启动转换。 Enabled 自动连续转换。 DiscontinuousConvMode: Disabled 禁止间断模式。这个在需要考虑功耗问题的产品中很有必要,也就是在某个事件触发下,开启转换。 Enabled 开启间断模式。 ADC_Regular_ConversionMode: Enable Regular Conversions 是否使能规则转换。 Number Of Conversion ADC转换通道数目,有几个写几个就行。 External Trigger Conversion Source 外部触发选择。这个有多个选择,一般采用软件触发方式。 Rank: Channel ADC转换通道 Sampling Time 采样周期选择,采样周期越短,ADC 转换数据输出周期就越短但数据精度也越低,采样周期越长,ADC 转换数据输出周期就越长同时数据精度越高。 ADC_Injected_ConversionMode: Enable Injected Conversions 是否使能注入转换。注入通道只有在规则通道存在时才会出现。 WatchDog: Enable Analog WatchDog Mode 是否使能模拟看门狗中断。当被 ADC 转换的模拟电压低于低阈值或者高于高阈值时,就会产生中断。 ADC2配置。 
生成独立的文件。 
STM32CUBEIDE配置 
若需要打印浮点型,需要勾选下面的选项。 
串口重定向 在main.c中,添加头文件,若不添加会出现 identifier “FILE” is undefined报错。
函数声明和串口重定向:
代码 定义变量,存放采集到的数据。
ADC校准。
采集数据。
测试结果 输入固定电压进行测试。 测试结果如下。 
———————————————— 版权声明:记帖 |
CubeMX生成CubeIDE工程代码乱码
STM32CubeIDE实时时钟(RTC)经验分享
STM32H563 ADC+TIM+DMA应用演示
实战经验 | ClassB功能安全认证代码与应用代码分区的实现要点
【STM32U3 评测】人体行为识别
【STM32U3 评测】串口控制步进电机与LabVIEW数据采集
实战经验 | STM32CubeIDE实用技巧之如何指定变量、函数、文件到指定内存
【STM32U3 评测】步进电机驱动
【STM32U3 评测】MNIST 数字识别
【STM32U3 评测】介绍、环境搭建、工程测试
 微信公众号
微信公众号
 手机版
手机版