对于STM32定时器输出PWM波需要了解定时器的基本使用方法和pwm的基本原理。这里使用STM32定时器3输出PWM波。
1.什么是PWM波
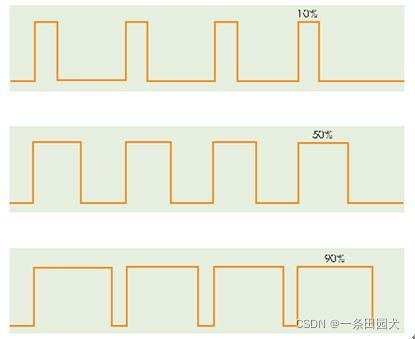
1.我们都知道单片机的引脚可以输出高低两种电平,高电平称之为1,而低电平称之为0;而所谓的PWM波指的是在一定周期内不同比例的高低电平,如下图所示,输出不同比例的方波,在一定时间内高电平的比例分别达到10%,50%,90%。

2.PWM的作用,我们都知道对于一个发光二极管,在一定电压范围内,输入端的电压越高,二极管的亮度也就越大。我们可以用单片机控制二极管的亮灭,我们会发现单片机引脚只能输出两种电压,即1与0;但是我们想控制二极管亮度。这是我们可以用PWM波控制,通过输出不同比例的高低电平,等效于一定的电压值,此时,就可以对二极管亮度调节了。
2.用定时器输出PWM
1.如下通过STM32的定时器3编写的pwm输出程序代码。
- //TIM3 PWM部分初始化
- //PWM输出初始化
- //arr:自动重装值
- //psc:时钟预分频数
- void TIM3_PWM_Init(u16 arr,u16 psc)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
-
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7|GPIO_Pin_6; //TIM_CH2
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO
- //初始化TIM3
- TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
- TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
- TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
- TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
-
- //初始化TIM3 Channel2 PWM模式
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
-
- TIM_OC1Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC1
- TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
- TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR1上的预装载寄存器
- TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
- TIM_Cmd(TIM3, ENABLE); //使能TIM3
- }
这里使用的是定时器的通道1与通道2,对应着A6,A7两个引脚。具体详细配置请看上述注释。
其中:
1.定时器中断一次的时间为Tout(溢出时间)=(ARR+1)(PSC+1)/Tclk,tclk为时钟频率,一般为72000000,arr:自动重装值 psc:时钟预分频数

2.

2.主程序中的相关配置
对于主程序先对TIM3_PWM_Init(u16 arr,u16 psc)进行初始化,并配置好arr与psc,以确定周期频率。然后再调用 void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare2);与void TIM_SetCompare2(TIM_TypeDef* TIMx, uint16_t Compare2);即可配置PWM值。
————————————————
版权声明:一条田园犬
|
 微信公众号
微信公众号
 手机版
手机版