|
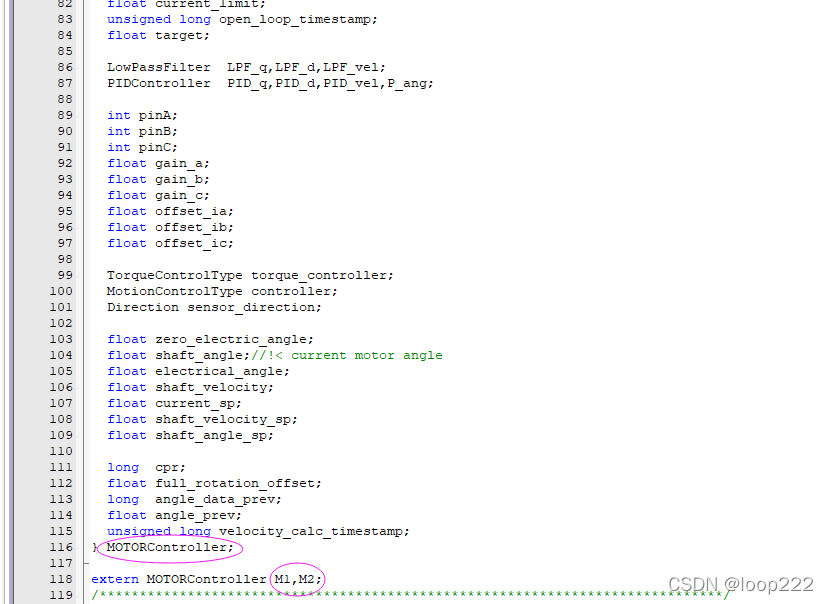
一、说明 双电机控制,主要是在上一章代码的基础上(SimpleFOC移植STM32(五)—— 电流采样及其变换),把一个电机的控制修改了对两个电机的控制。你的第一感觉会怎么做,把代码复制一遍,一个电机变两个电机,这样代码量就太大了。SimpleFOC的官方代码采用C++编写,定义了类,C语言中的结构体与类相似,通过结构体及其指针的应用,代码同样可以达到高效强悍的效果。 新建头文件 user.h ,定义电机的结构体,并声明M1,M2。下图 
在 main.c 中调用头文件,下图 
代码结构与单个电机控制没有变化,下图 

编译后的代码稍微比单个电机控制大一点,下图 
本章的工作,主要是从上到下从里到外,逐一修改函数,增加结构体指针,下图 
二、硬件介绍 2.1、原理图 
2.2、准备清单 
当前代码支持AS5600、AS5047P、TLE5012B和MA730编码器。 2.3、接线 
三、程序演示 3.1、设置参数 

部分PID参数设置放在了main函数中,设置其它PID参数请进入PID_init()函数。 3.2、编译下载 可以串口下载或者SWDIO下载; 如果是串口下载,Boot加上跳线帽,下载完毕后拿掉跳线帽,按复位键重启或者断电重启。 注意:复位重启只能重启单片机,编码器没有重启,如果I2C接口编码器不能正确读出,请断电重启。SPI接口编码器不受此影响。 3.3、根据设置的控制模式操作 两个电机的参数和控制完全独立,可设置为不同的控制模式,具体操作请看之前的教程,此处不再赘述。 四、双电机控制总结 双电机控制在操作和控制技术上与之前保持一致,主要是结构体及其指针的应用; 当前代码理论上很容易扩展为三个电机、四个电机或者更多电机的控制,只要单片机有足够资源; 结构体(structure)再往前一步就是类(class),C和C++的区别主要是编程思维的区别,结构体已经是C语言在单片机编程中的极限了。 五、力矩反馈 5.1、原理 把两个电机的角度差做为力矩模式的目标值,使角度差趋向于0。当一个电机转动时,另一个电机因为角度差而产生力矩跟随转动;同样当一个电机堵转时,另一个电机也会因为角度差趋向于堵转电机的角度。 代码是比较简单的,在双电机控制调试通过的情况下,只需要加入角度差计算就可以。 
力矩反馈要实现以下目标: 1、两个电机一个转动,另一个跟随,停止转动,另一个也停止,能够自稳。 2、拆掉一个电机,只接入任一个电机能够自稳。 5.2、硬件连接 先以相同的两个电机为例 
5.3、代码调试 代码简单,但是调试颇费功夫,让我想起了空调行业的一句谚语“三分设备,七分安装”,具体过程原因就不多说了,直接说结果。 如上图相同的两个电机,首先三相线不能接的一样,要让一个电机为CW另一个CCW,然后根据检测到的方向,调整代码中减数和被减数的位置。 

同样,不同型号的电机也可以按照上面的方法调试, 

调试的结果一定要符合以下两个目标: 1、两个电机一个转动,另一个跟随,停止转动,另一个也停止,能够自稳。 2、拆掉一个电机,只接入任一个电机能够自稳。 5.4、实战 

———————————————— 版权声明:loop222 |
基于stm32平台上的IC-MU磁绝对值编码器SPI通讯和码盘数据处理
使用STM32 MCU和MPU连接PDM数字麦克风
分享STM32资料-采用 STM32U031R8 MCU 的 STM32 Nucleo-64 开发板,官方资料,数据手册等资料
HRTIM 指南
使用 STM32 的 DWT 单元监控内存
DAC,COMP,HRTIM Fault 功能的使用
一个软件引起的 LSE 驱动不良的问题
STM32 GUI LTDC 最大像素时钟评估方法
STM32 Cordic 运算速度评估
全新OpenSTLinux 6.1版本发布
 微信公众号
微信公众号
 手机版
手机版