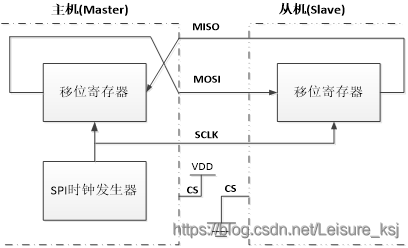
SPI (Serial Peripheral interface)是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。

今天分享下,基于STM32F103C8T6工控板上的两个SPI接口进行互相通讯,其中SPI1作为主机,SPI2作为从机。
硬件部分
1)某宝网上购买的STM32F103C8T6工控板,价格50¥左右;
2)某宝网上购买的232转USB数据线(如下图所示),价格15¥左右;
3)杜邦线若干,价格几乎为0¥。

硬件连接
由原理图(如下所示)可知,将PA5与PB13连接,PA6与PB14连接,PA7与PB15连接即可。注意:SPI与串口的连接不同,串口的RX引脚接另一个串口TX引脚,而两个SPI连接是同名字的相连!


部分代码
1.spi.h头文件
- /**
- ******************************** STM32F10x *********************************
- * @文件名称: spi.h
- * @作者名称: 闲人Ne
- * @摘要简述: SPI头文件
- ******************************************************************************/
- #ifndef __SPI_H
- #define __SPI_H
- /* 包含的头文件 ---------------------------------------------------------------*/
- #include "stm32f10x.h"
- /* 函数申明 -------------------------------------------------------------------*/
- void SPI1_Init(void);
- void SPI2_Init(void);
- u8 SPI1_ReadWriteByte(u8 TxData);
- u8 SPI2_ReadWriteByte(u8 TxData);
- #endif /* __SPI_H */
- /****** Copyright (C)2021 闲人Ne. All Rights Reserved ****** END OF FILE *******/
2.spi.c源文件
- /**
- ******************************** STM32F10x *********************************
- * @文件名称: spi.c
- * @作者名称: 闲人Ne
- * @摘要简述: SPI头文件
- ******************************************************************************/
- /* 包含的头文件 ---------------------------------------------------------------*/
- #include "spi.h"
- /**************************************************
- 函数名称:SPI1_Init()
- 函数功能:SPI1初始化函数:配置成主机模式
- 入口参数:无
- 返回参数:无
- 开发作者:闲人Ne
- ***************************************************/
- void SPI1_Init(void)
- {
- GPIO_InitTypeDef GPIO_InitStruct;
- SPI_InitTypeDef SPI_InitStruct;
- RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE ); // GPIOA时钟使能,选择SPI1,对应PA4,PA5,PA6,PA7
- RCC_APB2PeriphClockCmd( RCC_APB2Periph_SPI1, ENABLE ); // SPI1时钟使能
- // 初始化GPIOA,PA5/6/7都设置复用推挽输出AF_PP
- GPIO_InitStruct.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
- GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出AF_PP
- GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStruct);
- GPIO_SetBits(GPIOA,GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7); // PA5/6/7置高电平
- // 初始化SPI函数
- SPI_InitStruct.SPI_Direction = SPI_Direction_2Lines_FullDuplex; // 设置SPI单向或双向的数据模式:SPI设置为双线双向全双工
- SPI_InitStruct.SPI_Mode = SPI_Mode_Master; // SPI1设为主机
- SPI_InitStruct.SPI_DataSize = SPI_DataSize_8b; // 针对SPI_CR1寄存器的DFF位,设置数据帧大小为8位
- SPI_InitStruct.SPI_CPOL = SPI_CPOL_High; // 针对SPI_CR1寄存器的CPOL位,串行同步时钟的空闲状态为高电平
- SPI_InitStruct.SPI_CPHA = SPI_CPHA_2Edge; // 针对SPI_CR1寄存器的CPHA位,串行同步时钟的第二个跳变沿(即上升沿)数据被采样
- SPI_InitStruct.SPI_NSS = SPI_NSS_Soft; // 针对SPI_CR1寄存器的SSM位,NSS信号由软件(使用SSI位)管理
- SPI_InitStruct.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; // 针对SPI_CR1寄存器的BR位,波特率预分频值为256,最低速率
- SPI_InitStruct.SPI_FirstBit = SPI_FirstBit_MSB; // 针对SPI_CR1寄存器的LSBFIRST位,数据传输从MSB位开始
- SPI_InitStruct.SPI_CRCPolynomial = 7; // 针对SPI_CRCPR寄存器的CRCPOLY位,设为0x0007,为复位值
- SPI_Init(SPI1, &SPI_InitStruct);
- SPI_Cmd(SPI1, ENABLE); // 使能SPI外设
- }
- /**************************************************
- 函数名称:u8 SPI1_ReadWriteByte(u8 TxData)
- 函数功能:SPI1读写一个字节函数
- 入口参数:TxData:要写入的字节
- 返回参数:读取到的字节
- 开发作者:闲人Ne
- ***************************************************/
- u8 SPI1_ReadWriteByte(u8 TxData)
- {
- u8 retry=0;
- // 检查SPI_SR寄存器的TXE位(发送缓冲为空),其值0时为非空,1时为空
- while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET)
- {
- retry++; // 发送缓冲为空时,retry++
- if(retry>200)return 0;
- }
- SPI_I2S_SendData(SPI1, TxData); // 通过外设SPI2发送一个数据
- retry=0;
- // 检查SPI_SR寄存器的RXNE位(接收缓冲为空),其值0时为空,1时为非空
- while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET)
- {
- retry++; // 当接收缓冲为非空时,retry++
- if(retry>200)return 0;
- }
- return SPI_I2S_ReceiveData(SPI1); // 返回通过SPIx最近接收的数据
- }
- /**************************************************
- 函数名称:SPI2_Init()
- 函数功能:SPI2初始化函数:配置成从机模式
- 入口参数:无
- 返回参数:无
- 开发作者:闲人Ne
- ***************************************************/
- void SPI2_Init(void)
- {
- GPIO_InitTypeDef GPIO_InitStruct;
- SPI_InitTypeDef SPI_InitStruct;
- RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE ); // GPIOB时钟使能,选择SPI2,对应PB12,PB13,PB14,PB15
- RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE ); // SPI2时钟使能
- // 初始化GPIOB,PB13/14/15都设置复用推挽输出AF_PP,PB14对应MISO,最好设为带上拉输入
- GPIO_InitStruct.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
- GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出AF_PP
- GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOB, &GPIO_InitStruct);
- GPIO_SetBits(GPIOB,GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15); // PB13/14/15置高电平
- // 初始化SPI函数
- SPI_InitStruct.SPI_Direction = SPI_Direction_2Lines_FullDuplex; // 设置SPI单向或双向的数据模式:SPI设置为双线双向全双工
- SPI_InitStruct.SPI_Mode = SPI_Mode_Slave; // SPI2设为从机
- SPI_InitStruct.SPI_DataSize = SPI_DataSize_8b; // 针对SPI_CR1寄存器的DFF位,设置数据帧大小为8位
- SPI_InitStruct.SPI_CPOL = SPI_CPOL_High; // 针对SPI_CR1寄存器的CPOL位,串行同步时钟的空闲状态为高电平
- SPI_InitStruct.SPI_CPHA = SPI_CPHA_2Edge; // 针对SPI_CR1寄存器的CPHA位,串行同步时钟的第二个跳变沿(即上升沿)数据被采样
- SPI_InitStruct.SPI_NSS = SPI_NSS_Soft; // 针对SPI_CR1寄存器的SSM位,NSS信号由软件(使用SSI位)管理
- SPI_InitStruct.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; // 针对SPI_CR1寄存器的BR位,波特率预分频值为256,最低速率
- SPI_InitStruct.SPI_FirstBit = SPI_FirstBit_MSB; // 针对SPI_CR1寄存器的LSBFIRST位,数据传输从MSB位开始
- SPI_InitStruct.SPI_CRCPolynomial = 7; // 针对SPI_CRCPR寄存器的CRCPOLY位,设为0x0007,为复位值
- SPI_Init(SPI2, &SPI_InitStruct);
- SPI_Cmd(SPI2, ENABLE); // 使能SPI外设
- }
- /**************************************************
- 函数名称:u8 SPI1_ReadWriteByte(u8 TxData)
- 函数功能:SPI1读写一个字节函数
- 入口参数:TxData:要写入的字节
- 返回参数:读取到的字节
- 开发作者:闲人Ne
- ***************************************************/
- u8 SPI2_ReadWriteByte(u8 TxData)
- {
- u8 retry=0;
- // 检查SPI_SR寄存器的TXE位(发送缓冲为空),其值0时为非空,1时为空
- while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET)
- {
- retry++; // 发送缓冲为空时,retry++
- if(retry>200)return 0;
- }
- SPI_I2S_SendData(SPI2, TxData); // 通过外设SPI2发送一个数据
- retry=0;
- // 检查SPI_SR寄存器的RXNE位(接收缓冲为空),其值0时为空,1时为非空
- while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET)
- {
- retry++; // 当接收缓冲为非空时,retry++
- if(retry>200)return 0;
- }
- return SPI_I2S_ReceiveData(SPI2); // 返回通过SPIx最近接收的数据
- }
- /****** Copyright (C)2021 闲人Ne. All Rights Reserved ****** END OF FILE *******/
3.main.c主函数
- /**
- ******************************** STM32F10x *********************************
- * @文件名称: main.c
- * @作者名称: 闲人Ne
- * @库版本号: V3.5.0
- * @工程版本: V1.0.0
- * @开发日期: 2021年02月17日
- * @摘要简述: 主函数
- ******************************************************************************/
- /* 包含的头文件 ---------------------------------------------------------------*/
- #include "led.h"
- #include "spi.h"
- #include "serial_communication.h"
- #include "sys.h"
- #include "delay.h"
- #include "nvic_configuration.h"
- /************************************************
- 函数名称:int main()
- 函数功能:主函数入口
- 入口参数:无
- 返回参数:int
- 开发作者:闲人Ne
- *************************************************/
- u8 spi1_sand_data=0;
- u8 spi2_sand_data=100;
- u8 spi2_receive_data;
- u8 spi1_receive_data;
- int main(void)
- {
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
- delay_init();
- SPI1_Init();
- SPI2_Init();
- My_USART1_Init();
- D1=1;
- while(1)
- {
- spi1_receive_data=SPI1_ReadWriteByte(spi1_sand_data);
- printf("\nSP1接收的数据为:%d\r\n",spi1_receive_data);
- spi2_receive_data=SPI2_ReadWriteByte(spi2_sand_data);
- printf("\nSP2接收的数据为:%d\r\n",spi2_receive_data);
- spi1_sand_data++; spi2_sand_data++;
- delay_ms(500);
- }
- }
- /****** Copyright (C)2021 闲人Ne. All Rights Reserved ****** END OF FILE *******/
实验结果

实验结果完全符合逻辑,通讯成功!
经验分享
该程序可作为双芯片之间SPI通讯的参考代码。
————————————————
版权声明:天亮继续睡
|
.png) STMCU小助手
发布时间:2022-11-18 22:55
STMCU小助手
发布时间:2022-11-18 22:55
 微信公众号
微信公众号
 手机版
手机版