|
最近给朋友调试了STM32F407驱动VL53L0的激光测距,安装在机器人上的,遇到一些问题,这里发帖纪录一下。
关于VL53L0的资料和代码在正点原子那里都有,但是正点原子只是驱动了一路VL53L0,很多问题都需要我们自己解决,一路的VL53L0非常简单,随便参考一下例程就能完美解决,但是一旦涉及到多路设备,就会出现一堆问题,最突出最主要的就是多个VL53L0的地址设置,把握不住就会出现只有一路能正常使用的问题。
VL53L0X 简介
VL53L0X 是 ST 公司推出的新一代 ToF 激光测距传感器,采用了第二代 FlightSenseTM技术,利用飞行时间(ToF)原理,通过光子的飞行来回时间与光速的计算,实现测距应用。较比上一代 VL6180X,新的器件将飞行时间测距长度扩展至 2 米,测量速度更快,能效更高。除此之外,为使集成度过程更加快捷方便, ST 公司为此也提供了 VL53L0X 软件 API(应用编程接口)以及完整的技术文档,通过主 IIC 接口,向应用端输出测距的数据,大大降低了开发难度。
VL53L0X 特点包括:
①, 使用 940nm 无红光闪烁激光器,该频段的激光为不可见光,且不危害人眼。
②,系统视野角度(FOV)可达 25 度,传感器的感测有效工作直径扩展到 90 厘米。
③,采用脉冲式测距技术,避免相位式测距检测峰值的误差,利用了相位式检测中除波峰以外的光子。
④,多种精度测量和工作模式的选择。
⑤,测距距离能扩至到 2 米。
⑥, 正常工作模式下功耗仅 20mW,待机功耗只有 5uA。
⑦,高达 400Khz 的 IIC 通信接口。
⑧,超小的封装尺寸: 2.4mm × 4.4mm × 1mm。
VL53L0X 工作模式
VL53L0X 传感器提供了 3 种测量模式, Single ranging(单次测量)、 Continuous ranging(连续测量)、以及 Timed ranging(定时测量),下面我们将简单介绍下:
(1) Single ranging(单次测量),在该模式下只触发执行一次测距测量,测量结束后,VL53L0X 传感器会返回待机状态,等待下一次触发。
(2) Continuous ranging(连续测量),在该模式下会以连续的方式执行测距测量。一旦测量结束,下一次测量就会立即启动,用户必须停止测距才能返回到待机状态,最后的一次测量在停止前完成。
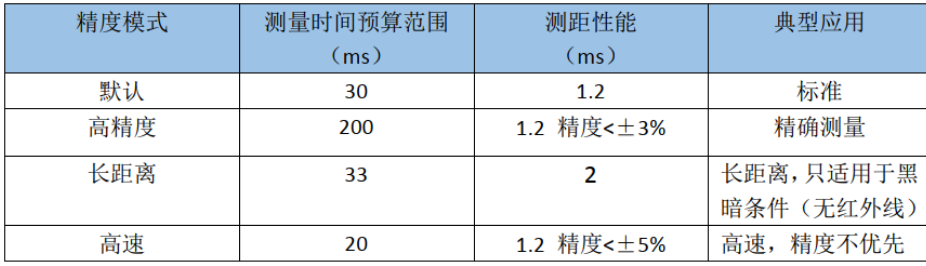
(3) Timed ranging(定时测量),在该模式下会以连续的方式执行测距测量。测量结束后,在用户定义的延迟时间之后,才会启动下一次测量。用户必须停止测距才能返回到待机状态,最后的一次测量在停机前完成。根据以上的测量模式, ST 官方提供了 4 种不同的精度模式,如表格所示: 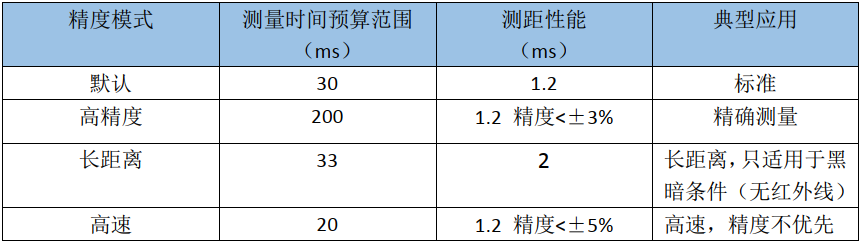
从表格可以看到,针对不同的精度模式,测量时间也是有所区别的,测量时间最快为高速模式,只需 20ms 内就可以采样一次,但精度确存在有±5%的误差范围。而在长距离精度模式下,测距距离能达到 2m,测量时间在 33ms 内,但测量时需在黑暗条件(无红外线)的环境下。所以在实际的应用中,需根据当前的要求去选择合适的精度模式,以达到最佳的测量效果。
以上资料来源于正点原子的《AN1703C ATK-VL53L0X 激光测距模块使用说明》。这里摘录一部分,方便进入主题。
因为今天是调试多路的VL53L0X设备,这里不完全借鉴正点原子的例程,但是官方提供的驱动我们还是必须要用的。
如果想要快速上手,文末直接下载我的代码,我的驱动库经过自己的修改,和正点原子有些不同。
我们直接从代码入手吧!
在初始化VL53L0X之前,我们必须初始化IIC外设,此次遵循正点原子的方法,用模拟IIC。
- #ifndef _VL53L0X_I2C_H
-
- #define _VL53L0X_I2C_H
-
-
-
- #include "stm32f10x.h"
-
- #include "stm32f10x_i2c.h"
-
-
-
- //四个VL53L0挂载在同一个IIC总线下,所以使用四个片选信号--2019/10/30
-
- //!!!!!!!注意:重新使能设备后,设备iic的地址会恢复为默认值0x52--2019/10/30
-
- //VL53L0 0
-
- #define I2C_SCL_GPIO GPIOB
-
- #define I2C_PIN_SCL GPIO_Pin_8
-
- #define I2C_SCL_HIGH() GPIO_SetBits(I2C_SCL_GPIO,I2C_PIN_SCL)
-
- #define I2C_SCL_LOW() GPIO_ResetBits(I2C_SCL_GPIO,I2C_PIN_SCL)
-
-
-
- #define I2C_SDA_GPIO GPIOB
-
- #define I2C_PIN_SDA GPIO_Pin_9
-
- #define I2C_SDA_HIGH() GPIO_SetBits(I2C_SDA_GPIO,I2C_PIN_SDA)
-
- #define I2C_SDA_LOW() GPIO_ResetBits(I2C_SDA_GPIO,I2C_PIN_SDA)
-
- #define I2C_SDA_STATE GPIO_ReadInputDataBit(I2C_SDA_GPIO,I2C_PIN_SDA)
-
-
-
- //片选使能--2019/10/30
-
- #define I2C_X_GPIO GPIOB
-
- #define I2C_PIN_X0 GPIO_Pin_12
-
- #define I2C_X0_HIGH() GPIO_SetBits(I2C_X_GPIO,I2C_PIN_X0)
-
- #define I2C_X0_LOW() GPIO_ResetBits(I2C_X_GPIO,I2C_PIN_X0)
-
-
-
- #define I2C_PIN_X1 GPIO_Pin_13
-
- #define I2C_X1_HIGH() GPIO_SetBits(I2C_X_GPIO,I2C_PIN_X1)
-
- #define I2C_X1_LOW() GPIO_ResetBits(I2C_X_GPIO,I2C_PIN_X1)
-
-
-
- #define I2C_PIN_X2 GPIO_Pin_14
-
- #define I2C_X2_HIGH() GPIO_SetBits(I2C_X_GPIO,I2C_PIN_X2)
-
- #define I2C_X2_LOW() GPIO_ResetBits(I2C_X_GPIO,I2C_PIN_X2)
-
-
-
- #define I2C_PIN_X3 GPIO_Pin_15
-
- #define I2C_X3_HIGH() GPIO_SetBits(I2C_X_GPIO,I2C_PIN_X3)
-
- #define I2C_X3_LOW() GPIO_ResetBits(I2C_X_GPIO,I2C_PIN_X3)
-
-
-
- void i2c_init(void);
-
- uint8_t i2c_write(uint8_t addr, uint8_t reg, uint32_t len, uint8_t * data);
-
- uint8_t i2c_read(uint8_t addr, uint8_t reg, uint32_t len, uint8_t *buf);
-
-
-
-
-
- #endif
- void i2c_init(void)
-
- {
-
- GPIO_InitTypeDef GPIO_InitStructure;
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
-
-
-
- //模拟iic配置
-
- GPIO_InitStructure.GPIO_Pin = I2C_PIN_SCL;
-
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
-
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
-
- GPIO_Init(I2C_SCL_GPIO, &GPIO_InitStructure);
-
-
-
- GPIO_InitStructure.GPIO_Pin = I2C_PIN_SDA;
-
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
-
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
-
- GPIO_Init(I2C_SDA_GPIO, &GPIO_InitStructure);
-
-
-
- //片选使能配置
-
- GPIO_InitStructure.GPIO_Pin = I2C_PIN_X0;
-
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
-
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
-
- GPIO_Init(I2C_X_GPIO, &GPIO_InitStructure);
-
-
-
- GPIO_InitStructure.GPIO_Pin = I2C_PIN_X1;
-
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
-
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
-
- GPIO_Init(I2C_X_GPIO, &GPIO_InitStructure);
-
-
-
- GPIO_InitStructure.GPIO_Pin = I2C_PIN_X2;
-
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
-
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
-
- GPIO_Init(I2C_X_GPIO, &GPIO_InitStructure);
-
-
-
- GPIO_InitStructure.GPIO_Pin = I2C_PIN_X3;
-
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
-
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
-
- GPIO_Init(I2C_X_GPIO, &GPIO_InitStructure);
-
-
-
- I2C_X0_LOW();
-
- I2C_X1_LOW();
-
- I2C_X2_LOW();
-
- I2C_X3_LOW();
-
- delay_ms(20);
-
- }

在模块初始化时调用IIC外设初始化,同时初始化4个测距模块。 -
- {
-
-
-
- VL53L0X_Error Status = VL53L0X_ERROR_NONE; //初始值赋值为0
-
-
-
- //初始化一定按照这个顺序执行,否则不成功
-
- VL53L0X_i2c_init();
-
- vl53l0x_initX(&vl53l0x_dev0,0);
-
- vl53l0x_initX(&vl53l0x_dev1,1);
-
- vl53l0x_initX(&vl53l0x_dev2,2);
-
- vl53l0x_initX(&vl53l0x_dev3,3);
-
-
-
- return Status; //返回0
-
- }
在vl53l0x_initX()函数便去别去正点原子的驱动,这里是全文的重点,很多单设备发展到多设备这里都会出问题,在初始化设备时一定要设置设备的IIC地址。
//单个VL53L0初始化
VL53L0X_Error vl53l0x_initX( VL53L0X_Dev_t *pMyDevice ,u8 vl53l0_x_id)
{
VL53L0X_Error Status = VL53L0X_ERROR_NONE; //初始值赋值为0
pMyDevice->I2cDevAddr = 0x52; //iic地址 0x52是默认地址,要初始化必须先写0x52,才能初始化,之后再通过软件修改
pMyDevice->comms_type = 1; //选择IIC还是SPI iic=1;SPI=0
pMyDevice->comms_speed_khz = 400; //iic速率
//正点原子的VL53L0用户手册上写明了再次使能时地址会恢复为0x52,所以只能使能一次,设置好地址即可,这里是核心
switch(vl53l0_x_id)
{
case 0:
I2C_X0_HIGH();
delay_ms(20);
vl53l0x_Addr_set(pMyDevice,0x60);//设置第一个VL53L0X传感器I2C地址
break;
case 1:
I2C_X1_HIGH();
delay_ms(20);
vl53l0x_Addr_set(pMyDevice,0x62);//设置第一个VL53L0X传感器I2C地址
break;
case 2:
I2C_X2_HIGH();
delay_ms(20);
vl53l0x_Addr_set(pMyDevice,0x64);
break;
case 3:
I2C_X3_HIGH();
delay_ms(20);
vl53l0x_Addr_set(pMyDevice,0x66);
break;
}
Status = VL53L0X_DataInit(pMyDevice); // Data initialization //VL53L0X_DataInit:一次设备的初始化,初始化成功返回0
if(Status != VL53L0X_ERROR_NONE){ //判断如果状态不为0 打印错误信息
print_pal_error(Status);
return Status; // 返回错误值 可通过此值DEBUG查找错误位置
}
Status = VL53L0X_GetDeviceInfo(pMyDevice, &vl53l0x_dev_info); //读取给定设备的设备信息
if(Status != VL53L0X_ERROR_NONE){
print_pal_error(Status);
return Status;
}
printf("VL53L0X_GetDeviceInfo:\n");
printf("Device Name : %s\n", vl53l0x_dev_info.Name); //设备名
printf("Device Type : %s\n", vl53l0x_dev_info.Type); //产品类型VL53L0X = 1, VL53L1 = 2
printf("Device ID : %s\n", vl53l0x_dev_info.ProductId); // 设备ID
printf("ProductRevisionMajor : %d\n", vl53l0x_dev_info.ProductRevisionMajor);
printf("ProductRevisionMinor : %d\n", vl53l0x_dev_info.ProductRevisionMinor);
if ((vl53l0x_dev_info.ProductRevisionMajor != 1) && (vl53l0x_dev_info.ProductRevisionMinor != 1)){
printf("Error expected cut 1.1 but found cut %d.%d\n",
vl53l0x_dev_info.ProductRevisionMajor, vl53l0x_dev_info.ProductRevisionMinor);
Status = VL53L0X_ERROR_NOT_SUPPORTED;
print_pal_error(Status);
return Status;
}
Status = vl53l0x_measure_init(pMyDevice); //测量配置
vl53l0x_status = Status;
if(Status != VL53L0X_ERROR_NONE){ //判断如果不为0打印错误信息
print_pal_error(Status);
return Status;
}
} 模块的初始化顺序是:使用默认地址初始化设备---修改传感器IIC地址---再次初始化---测量配置
所以在这个传感器的初始化中我们先用默认的0X52地址将VL53L0X模块初始化,初始化完成后方可修改其地址,这里使用SWITCH函数判断用户配置的地址,避免函数重写,减小代码尺寸。修改完地址调用VL53L0X_DataInit()函数进行模块的再次初始化,使修改生效。注意:VL53L0X不能保存地址,如果掉电后地址会恢复为默认的0X52,同时修改完地址后只能执行一次初始化,更多的初始化次数会也会导致地址复位。这在硬件的处理上要加倍注意。
在这里我翻车了,因为硬件不在我的手边,我都是远程帮助调试,没看到硬件,我的朋友一直反应各种问题,最多的就是测距有问题,测出的数据都是错的,或者只有一个传感器可以使用。我检查了很多遍的代码,始终找不到原因,还好他自己也想到了硬件的问题(因为他们硬件干过很多错事,都是一些小白容易犯的,但是那个老员工比较粗心,也会犯错),最后发现是线的质量太差,线的长度太长,IVL53L0X模块安装的位置不好,因为模块安装在可动部件上的,导致每次移动都会导致模块短暂的掉电,导致地址复位。后来加装模块的减震装置更换屏蔽线解决问题。
复位完成便可以测试: 
- VL53L0X_Error vl53l0x_start_single_test(VL53L0X_Dev_t *pdev, \
-
- VL53L0X_RangingMeasurementData_t *pdata)
-
- {
-
- int i=0,j=0,sum=0;
-
- VL53L0X_Error status = VL53L0X_ERROR_NONE;
-
-
-
- if(vl53l0x_status != VL53L0X_ERROR_NONE)
-
- return vl53l0x_status;
-
-
-
- status = VL53L0X_PerformSingleRangingMeasurement(pdev, pdata); 执行单次测距并获取测距测量数据
-
- if(status != VL53L0X_ERROR_NONE){
-
- printf("error:Call of VL53L0X_PerformSingleRangingMeasurement\n");
-
- return status;
-
- }
-
-
-
- for(i=0;i<5;i++)
-
- sum+=pdata->RangeMilliMeter;
-
- pdata->RangeMilliMeter=sum/5;
-
- printf("%d\r\n",pdata->RangeMilliMeter);
-
- return status;
-
- }
打印测试结果,通过! 
主函数循环测试,因为项目对代码的速度要求不高,所以一些状态判断代码中还有保留,这里跟着原子走,没做太多改变。
因为这个项目是帮助朋友做的调试,而且他们的项目还在研发期,太多的东西不能介绍,照片啥的都放弃了。一个简短的帖子,希望能帮到大家把握住该模块,蟹蟹。
---------------------
作者:呐咯密密
|
.png) STMCU小助手
发布时间:2022-12-10 23:00
STMCU小助手
发布时间:2022-12-10 23:00
 微信公众号
微信公众号
 手机版
手机版