.png) STMCU小助手
发布时间:2023-2-5 18:50
STMCU小助手
发布时间:2023-2-5 18:50
|
前言 了解DHT11温湿度传感器相关知识,进行DHT11传感器的开发及数据获取,并通过串口调试助手查看 一、温湿度传感器相关知识 1. DHT11简介 DHT11温湿度传感器是一种比较便宜的常见的温湿度传感器,它的内部由两个元件构成,一个是电阻式的感湿元件用来检测环境湿度,另一个是NTC测温元件来测量温度,在测得数据后,两个元件会将数据传送给内部一个集成的8位的处理器来对数据进行处理,并将它们转换为数字量,这些数据可以通过串口传送给主机。DHT11温湿度传感器有四个管脚,只有一条是数据线接口,所以在传输数据时仅需要1个I/O就能同时传输测得的温度以及湿度,在进行程序编写时更加简洁方便。因为DHT11集成度较好,体积比较小,所以消耗也很小,抗干扰能力更强,稳定性较好,不易受到外界干扰。 Pin1 VDD 供电 3-5.5V DC Pin2 DATA 串行数据,单总线 Pin3 NC 空脚,悬空 Pin4 GND 接地,电源负极 DHT11集成度很高,封装的很简洁,只有四个管脚,所以连接也是相对比较方便。DHT11管脚Pin1接一个3-5.5V的直流电源的正极,管脚Pin2为数据端,主要用于传输数据,但是在接线时需要加一个5KΩ的上拉电阻连接到主机MCU上,用来保证数据传输的稳定性,同时还要注意这个5KΩ是在管脚Pin2与主机之间的接线小于20m时才有用,在大于20m时就需要根据实际情况来确定需要加多大的上拉电阻来保持稳定性。管脚Pin3不起什么作用,只需要将其悬空不接线即可,管脚Pin4接地。 2.数据格式 DHT11和DS18B20不同,DHT11不需要配置,可以直接读取数据,一次完整的数据传输为40bit,先传输高字节的数据再传输低字节的数据,也就是低位后出,高位先出模式。 数据格式: 8bit湿度整数数据 + 8bit湿度小数数据 +8bit温度整数数据 + 8bit温度小数数据 +8bit校验和 数据传送正确时校验和数据等于 8bit湿度整数数据 + 8bit湿度小数数据 +8bit温度整数数据 + 8bit温度小数数据 所得结果的末8位。 3.数据传输 数据线一开始处于高电平状态,用户MCU将总线电平拉低,表示用户要开始获取数据,然后将电平拉高并延时等待一段时间,等待DHT11回复,如果DHT11将总线拉低,表示已经收到主机信号,并响应主机信号,准备输出,然后将总线电平拉高,并延时一段时间,表示准备传输40bit的数据。然后将数据总线拉低一段时间开始传输数据,主要是进行2进制数据传输,传输0和1,并用不同的拉高电平延时时间来表示数据0和1。用户可以选择读取湿度还是温度,整数还是小数。并且数据传输是需要DHT11收到主机MCU发送的开始信号,才会开始采集数据传输数据,而且此时DHT11会转到低速模式。 
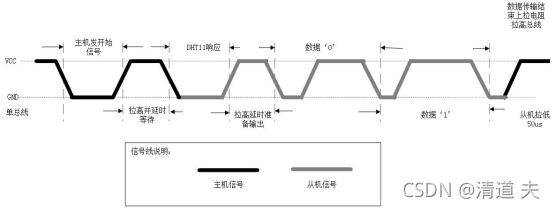
总线在空闲时因为上拉电阻会处于高电平状态,主机用户MCU会发送信号将电平拉低至少18us,太短DHT11可能会检测不到主机的起始信号。之后主机会再将电平拉高20-40us,DHT11识别到后,会将电平拉低80us,表示DHT11已经接收到主机发送的开始信号,之后再将总线切换到输入模式,然后DHT11会再将电平拉高80us表示竹北开始传输数据。之后会再将电平拉低,然后开始传输数据。 当接收到主机的开始信号后,DHT11会将总线拉低80us来发送响应信号,表示已经接收到,然后会将总线拉高80us,并准备发送数据,每一位的数据都以50us的低电平间隙开始,就是每两个数据之间都有一个50us的低电平信号来表示一位数据传输完成。DHT11用电平拉高延时的时间来表示数据为位0还是1。通常用拉高26-28us来表示数据‘0’,用拉高70us来表示数据‘1’。当最后一位数据传输完成后,DHT11会将总线拉低50us,随后总线又会因为上拉电阻将总线拉高,并处于空闲状态。 DHT11读取数据“0”时序图 
DHT11读数据“1”时序图 
二、程序实现 1.dht11.h DHT11的程序实现主要是根据它的读写时序来实现的,因此在进行程序的编写时要根据它的读写时序进行模拟,实现单片机与DHT11之间的数据通信。 代码如下(示例):
DHT11用到的数据总线是PE6,接线时,DHT11数据线接到PE6,以及我们需要用到的函数的声明: Void DHT11_Init(void)为DHT11的初始化函数; uint8_t DHT11_Read_TempAndHumidity ( DHT11_Data_TypeDef * DHT11_Data )为DHT11的数据读取函数,这个函数会将读取到的数据赋值给DHT11_Data结构体里的变量,然后还会有一个返回值判断是否读取成功; 2.dht11.c 代码如下(示例):
3.main.c
4.串口显示 将开发板连接电脑,然后打开串口调试助手,就会看到温度以及湿度的数据 
总结 做到这一步算是已经完成温湿度采集并串口显示,有需要的话可以进行LCD显示。 ———————————————— 版权声明:清道 夫 |
【福利三:雨露均沾·逢7狂欢】之三:AI帮我查BUG
福利三:雨露均沾·逢7狂欢】之二:STM32F407VG串口通信乱码故障的排除
基于STM32F103的I2C主从机通信
OpenBLT移植到STM32F103战舰开发板上适用于所有STM32F103系列的Bootloader
TFT LCD 与 FSMC 的硬件连接大容量 STM32F10xxx FSMC 接口
单片机:初学者该了解的STM32F103基础知识
2025软件工具兔哥知道
STM32之继电器模块
STM32固件库分享,超全系列整理
【MCU实战经验】基于STM32F103的二轮平衡车(6轴上位机 源代...
 微信公众号
微信公众号
 手机版
手机版