|
一、CAN控制器简介 STM32自带了基本扩展CAN外设,又称bxCAN,bxCAN的特点如下: 1、支持CAN协议2.0A和2.0B主动模式 2、波特率最高达1Mbps 3、支持时间触发通信 4、具有3个发送邮箱 5、具有3级深度的2个接收FIFO 6、可变的筛选器组(也称过滤器组,最多28个) CAN控制器简介-模式 工作模式 1)初始化模式(INRQ=1,SLEEP=0) 2)正常模式(INRQ=0,SLEEP=0) 3)睡眠模式(SLEEP=1) 通过CAN_MCR寄存器控制INRQ和SLEEP 测试模式 1)静默模式(LBKM=0,SILM=1) (静默模式下bxCAN可以接收CANRX但是不会发送任何CANTX,可以监控总线上的数据) 2)环回模式(LBKM=1,SILM=0) (环回模式下bxCAN可以发送CANTX但是不会接收任何CANRX。它发送的数据,发送与接收会形成一个环路,从而达到自发自收的作用,可以自己检测发送的数据是否发送出去) 3)环回静默模式(LBKM=1,SILM=1) (不管总线上如何都不影响,自发自收,“闭关锁国”) 通过CAN_BTR寄存器控制LBKM和SILM 标识符筛选器 1、CAN的标识符不表示目的地址而是表示发送优先级。接收节点根据标识符的值来决定是否接收对应消息。 2、STM32 CAN控制器提供了28个可配置的筛选器组,可以降低CPU处理CAN通信的开销。 3、STM32 CAN控制器每个筛选器组由2个32位寄存器组成(CAN_FxR1和CAN_FxR2,x=0~27)。根据位宽不同,每个筛选器组可提供:1个32位筛选器,包括:STDID[10:0]、EXTID[17:0]、IDE和RTR位;2个16位筛选器,包括:STDID[10:0]、IDE、RTR和EXTID[17:15]位 4、筛选器可配置为:屏蔽位模式和标识符列表模式。在屏蔽位模式下,标识符寄存器和屏蔽寄存器一起,指定报文标识符的任何一位,应该按照“必须匹配”或“不用关心”处理。在标识符列表模式下,屏蔽寄存器也被当作标识符寄存器用。因此,不是采用一个标识符加一个屏蔽位的方式,而是使用2个标识符寄存器。接收报文标识符的每一位都必须跟筛选器标识符相同。 通过CAN_FM1R和CAN_FS1R可配置筛选器的位宽和模式 
1、为了过滤出一组标识符,应该设置筛选器组工作在屏蔽位模式。 2、为了过滤出一个标识符,应该设置过滤器组工作在标识符列表模式 3、应用程序不用的筛选器组,应该保持在禁用状态(通过CAN_FA1R设置)。 筛选器组中的每个筛选器,都被编号为(筛选器编号)从0开始,到某个最大数值,取决于筛选器组的模式和位宽的设置。 4、通过CAN_FFA1R的设置,可以将筛选器组关联到FIFO0/FIFO1 CAN发送流程: 
程序选择1个空置的邮箱(TME=1)—>设置标识符(ID),数据长度和发送数据—>设置CAN_TIxR的TXRQ位为1,请求发送—>邮箱挂号(等待成为最高优先级)—>预定发送(等待总线空闲)—>发送—>邮箱空置 挂号期间和预定期间如果不想发送了可以ABRQ=1强制停止发送,发送的时候如果发送失败会进行再次发送尝试,当尝试次数达到最大时就会停止发送。 CAN发送流程: 
FIFO空—>收到有效报文—>挂号_1(存入FIFO的一个邮箱。这个由硬件控制我们不需要理会) —>收到有效报文—>挂号_2—>收到有效报文—>挂号_3—>收到有效报文—>溢出。 CAN收到的有效报文,存储在3级邮箱深度的FIFO中。FIFO接收到的报文数,我们可以通过查询CAN_RFxR的FMP寄存器来得到,只要FMP不为0,我们就可以从FIFO读出收到的报文。 报文FIFO具有锁定功能(由CAN_MCR,RFLM位控制),锁定后,新数据将丢弃,不锁定则新数据将代替老数据。 ~~STM32的CAN位时序,如下图所示:~~ 
(STM32的CAN将传播时间段和相位缓冲时间段1合并为时间段1) STM32F407,设TS1=6、TS2=5、BRP=5,波特率=42000/[(7+6+1)*6]=500Kps。 二、CAN控制器--寄存器简介 
CAN主控制寄存器(CAN_MCR) 
INRQ位:设置INRQ=0,可使CAN从初始化模式进入正常工作模式。设置INRQ=1,可使CAN从正常工作模式进入初始化模式。 CAN初始化时,先设置INRQ=1,进入初始化模式,进行初始化(尤其是CAN_BTR的设置,该寄存器必须在CAN正常工作之前设置),之后再设置INRQ=0进入正常工作模式。 CAN位时序寄存器(CAN_BTR) 
CAN接收FIFO寄存器(CAN_RF0R/CAN_RF1R) 
CAN_RF0R用于控制FIFO0;CAN_RF1R用于FIFO1控制。 CAN发送邮箱标识符寄存器(CAN_TIxR)(x=0~2) 
CAN发送邮箱数据长度和时间戳寄存器(CAN_TDTxR)(x=0~2) 
CAN发送邮箱数据寄存器(CAN_TDLxR/CAN_TDHxR)(x=0~2) 
图为CAN_TDLxR寄存器的描述,用于存储低4个字节的数据。CAN_TDHxR寄存器与之类似,用于存储高4个字节的数据。要发送的数据就是存储在这两个寄存器。 CAN接收FIFO邮箱标识符寄存器(CAN_RIxR)(x=0/1) 
CAN接收FIFO邮箱数据长度和时间戳寄存器(CAN_RDTxR)(x=0/1) 
CAN筛选器模式寄存器(CAN_FM1R) 
该寄存器设置筛选器的工作模式,必须再CAN_FMR寄存器FINIT=1时配置。 CAN筛选器尺度寄存器(CAN_FS1R) 
该寄存器用于设置筛选器的位宽,必须在CAN_FMR寄存器FINIT=1时配置。 CAN筛选器FIFO关联寄存器(CAN_FFA1R) 
该寄存器设置报文通过筛选器组之后,被存入的FIFO,如果对应位为0,则存储到FIFO0;如果为1,则存放到FIFO1。该寄存器只能在过滤器处于初始化模式(CAN_FMR寄存器的FINIT=1)下配置。 CAN筛选器激活寄存器(CAN_FA1R) 
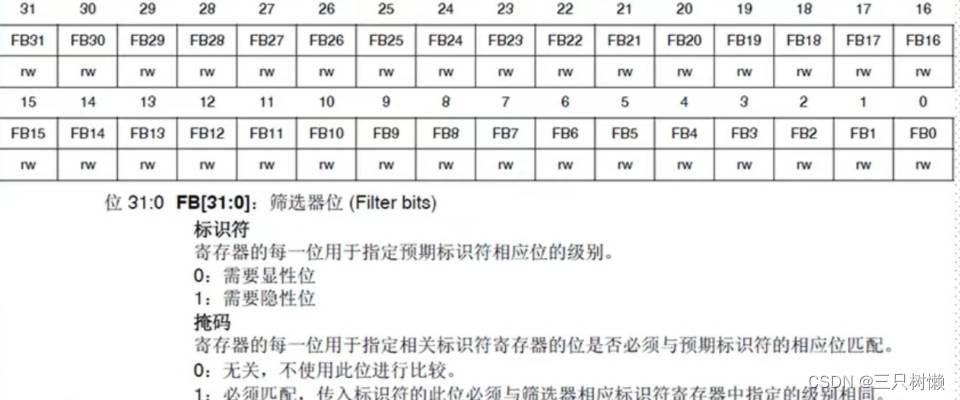
该寄存器用于设置筛选器组的开启和关闭。对应位置1,即开启对应的筛选器组;置0则关闭该筛选器组。 CAN筛选器组i寄存器x(CAN_FiRx)(i=0~27,x=1/2) 
每个筛选器组的CAN_FiRx都由2个32位寄存器构成,即:CAN_FiR1和CAN_FiR2。根据过滤器位宽和模式的不同设置,这两个寄存器的功能也不尽相同。 三、初始化流程 1、配置相关引脚的复用功能,使能CAN时钟。 要用CAN,先要使能CAN的时钟,CAN的时钟通过APB1ENR的第25位来设置。其次要设置CAN的相关引脚为复用输出,这里我们需要设置PA1为上拉输入(CAN_RX引脚)PA12为复用输出(CAN_TX1引脚),并使能PA口的时钟。 2、设置CAN工作模式及波特率等。 通过先设置CAN_MCR寄存器的INRQ位,让CAN进入初始化模式,然后设置CAN_MCR的其它相关控制位。再通过CAN_BTR设置波特率和工作模式(正常模式/环回模式)等信息。最后设置INRQ为0,退出初始化模式。 3、设置滤波器。 例:使用筛选器组0,并工作在32位标识符屏蔽位模式下。先设置CAN_FMR的FINIT位,进入初始化模式,然后设置筛选器组0的工作模式以及标识符ID和屏蔽位。最后激活筛选器,并退出初始化模式。 ———————————————— 版权声明:三只树懒 如有侵权请联系删除 |
基于stm32平台上的IC-MU磁绝对值编码器SPI通讯和码盘数据处理
使用STM32 MCU和MPU连接PDM数字麦克风
分享STM32资料-采用 STM32U031R8 MCU 的 STM32 Nucleo-64 开发板,官方资料,数据手册等资料
HRTIM 指南
使用 STM32 的 DWT 单元监控内存
DAC,COMP,HRTIM Fault 功能的使用
一个软件引起的 LSE 驱动不良的问题
STM32 GUI LTDC 最大像素时钟评估方法
STM32 Cordic 运算速度评估
全新OpenSTLinux 6.1版本发布
 微信公众号
微信公众号
 手机版
手机版