在这里我们配置编码器模式,开启时钟和溢出中断

在中断回调函数里,我们将TIM4->CR1的第5位不变,假如第五位是0,应选择递增计数,我们让计数器增加1。(0x0010==0000 0000 0001 0000)这里的次数我们是在计算溢出次数。要注意我们在TIM4_Init() 是把计数器CNT的值设为了1000,而ARR设置成了2000,这样计数器每次开始工作都是从1000->2000,0->2000,0->2000这样循环,Interupt_Num的值就是我们记录的溢出总数,而最开始的一次溢出是从1000开始,所以总的脉冲数就是 (溢出总数-1)*2000+1000(最开始的1000)+ CNT(计数器内未达到2000的值),之所以用溢出总数-1是因为我们总的脉冲数里把最开始1000->2000的值加进去了,所以要减去1000->2000的一次溢出次数。 TIM4_Init(2000,3);在主函数内初始化TIM4时设置了ARR为2000。
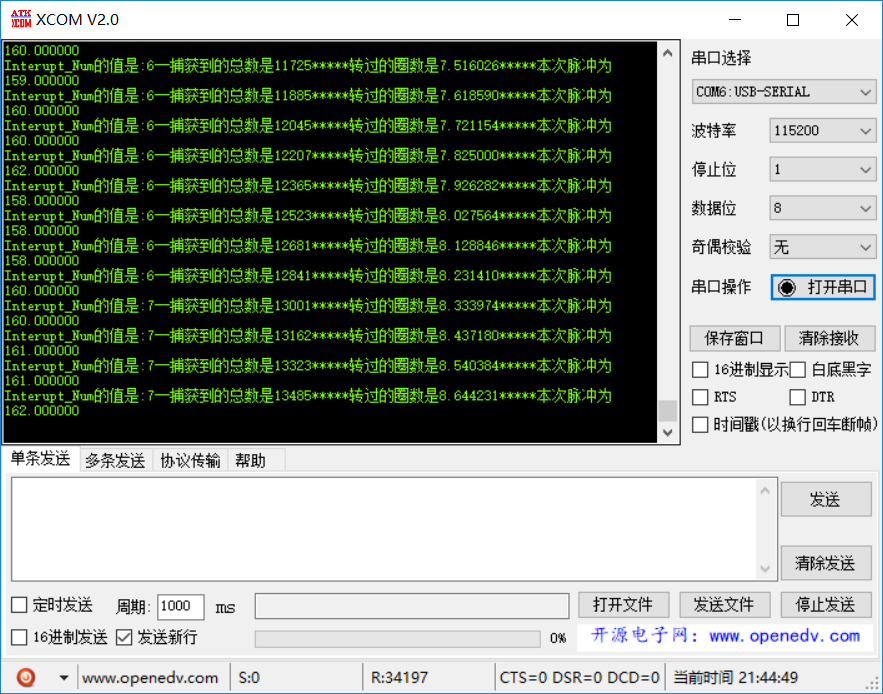
AAA是我设置用来计算速度的变量。在每次最开始调用Circle_Print()的时候我们首先把测过的总的脉冲数赋给变量AAA,此时AAA=0,,然后在Pulse_Num = 1000 + (Interupt_Num - 1) *2000 +TIM4->CNT ; //在第一圈完成之后,计算脉冲数多的方法这一句计算总的脉冲数,计算原理我们已经在上一条说过了。然后在这一句speed =(Pulse_Num-AAA);我们用至今为此总的脉冲数减去AAA即为每两次调用Circle_Print()的脉冲差,而我们在主函数中使用一个100ms的延时,所以时间差为100ms,脉冲反映小车路程,可以得到速度。 ***硬件*** 我使用的编码器(6线,分AB相,客服叫做13相?不太懂)转一圈是390个脉冲,使用四倍频,转一圈即为1560个脉冲。用总脉冲数除以1560即为至今为止转过的圈数。 小车直径为6.3cm(没找到参数,手动测量的0.0), 周长约为0.204m. ***下载验证*** 
可以看到,第一个返回总的溢出数,第二个为总圈数,第三个为速度。 因为在主函数中使用一个100ms的延时,每0.1秒转过的脉冲数为160左右,约为0.1圈,每秒转过1圈。 中断回调函数程序里有一句PB0!=PB0;而我的电机一IN1接的就是PB0,我改的时候忘记删掉了这句,然后我的第一个轮子(编码器接的第二个轮子)就一会转一会不转0.0 在文件中写入了函数之后要在头文件和主函数里添加初始化,否则不会识别。 TIM4_Init(2000,3);在主函数内初始化TIM4时设置了ARR为2000。 ———————————————— 版权声明:被大佬糊弄的只会点灯的小菜鸡 如有侵权请联系删除 |
【福利三:雨露均沾·逢7狂欢】之四:用一个定时器同步另外两个定时器输出PWM
【逢7发帖赢大礼】STM32开发之WIFI实时时钟
【逢7发帖赢大礼】STM32开发之指纹识别!
【逢7发帖赢大礼】STM32开发之环境空气质量监测
【逢7发帖赢大礼】STM32开发之人体实时运动信息监测!
【逢7发帖赢大礼】STM32开发之IC门禁卡UID读取方法!
【逢7发帖赢大礼】全网最简单的Arduino_STM32开发环境搭建教程!
STM32F4中文用户手册
STM32F400、STM32F402 Cortex-M4超值单片机
SPI 高温读错最后一位?STM32F42xx 官方根治方案
 微信公众号
微信公众号
 手机版
手机版