|
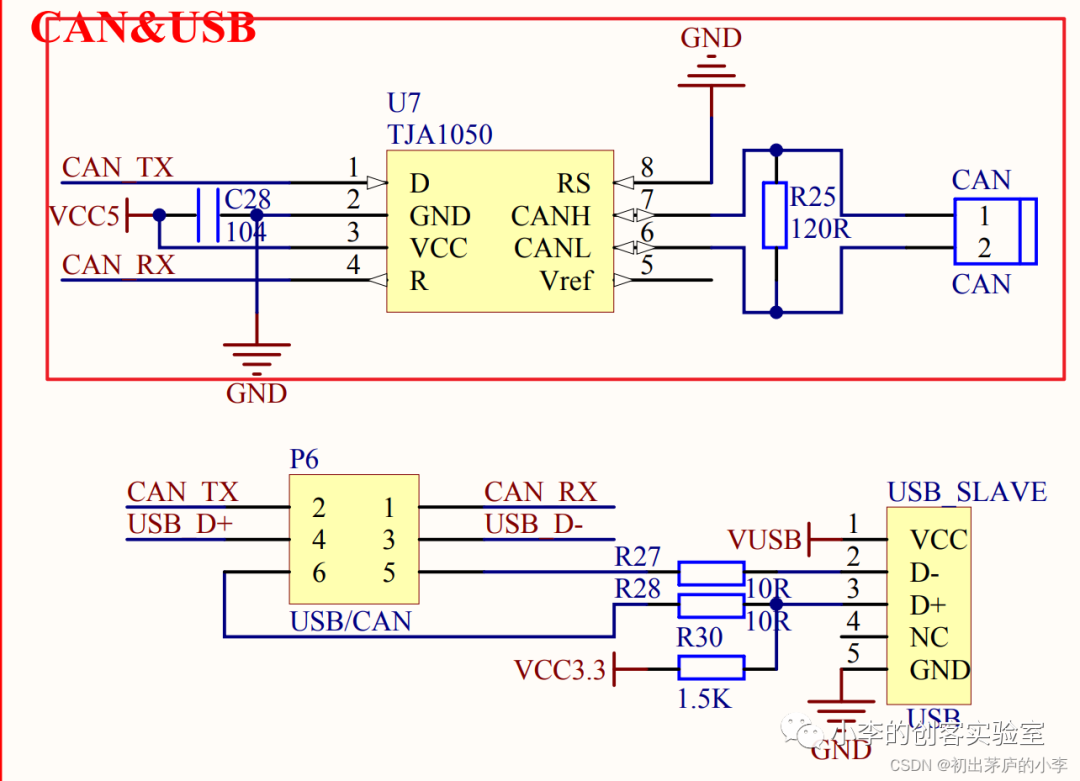
原理图

代码实现思路发送思路:定时发送 按键测试发送 接收思路:中断接收
CAN代码实现定义了两个全局变量TxMessage和RxMessage, 分别用于发送和接收CAN消息的邮箱结构体。 - CanTxMsg TxMessage = {0};//发送邮箱结构体
- CanRxMsg RxMessage = {0};//接收邮箱结构体
配置对应的引脚模式 通过GPIO_InitTypeDef结构体初始化了GPIOA的引脚12,配置为复用推挽输出。接着,初始化了引脚11,配置为浮空输入。
CAN_RX的模式对于CAN接收引脚,可以选择使用浮空输入模式或上拉输入模式,具体取决我们硬件设计和应用要求。 浮空输入模式(Floating Input)是指将引脚置为高阻态,不连接到任何电平源,允许外部信号自由驱动引脚电平。在CAN总线中,通常使用终端电阻(通常为120欧姆)来驱动CAN引脚电平。这样可以确保在总线空闲状态时,引脚电平为高阻态。 上拉输入模式(Pull-up Input)是指在引脚和VDD之间连接一个上拉电阻,将引脚电平拉高到VDD(逻辑高电平)或外部信号源。在CAN总线中,上拉输入模式可用于引脚电平的恢复和传输。 选择浮空输入模式还是上拉输入模式取决于具体应用的要求。通常,如果CAN总线上的其他设备已经提供了终端电阻,可以选择使用浮空输入模式。如果的硬件设计中没有终端电阻,您可以选择使用上拉输入模式,并使用外部上拉电阻将引脚电平拉高到逻辑高电平。
CAN_TX的模式在CAN通信中,CAN_TX模式是用于配置CAN发送引脚的模式。选择适当的CAN_TX模式取决于我们的硬件设计和应用需求。 常见的CAN_TX模式有以下两种: 推挽输出模式(Push-Pull Output):在该模式下,CAN发送引脚被配置为推挽输出,可以提供较高的驱动能力,能够输出高电平和低电平两种电平状态。这种模式适用于直接驱动总线上的终端电阻,提供较强的信号驱动能力。 开漏输出模式(Open-Drain Output):在该模式下,CAN发送引脚被配置为开漏输出,只能提供低电平输出,而高电平状态是通过外部上拉电阻拉高到逻辑高电平。这种模式适用于与其他设备共享总线的情况,需要使用外部上拉电阻来拉高总线电平。
选择CAN_TX模式取决于我们的硬件设计和连接配置。如果我们的硬件设计中包含终端电阻,并且CAN总线上没有其他设备需要共享总线,您可以选择推挽输出模式。如果我们的硬件设计中没有终端电阻或需要与其他设备共享总线,则可以选择开漏输出模式。 - RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能PORTA时钟
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);//使能CAN1时钟
- GPIO_InitTypeDef GPIO_InitStructure;
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽
- GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化IO
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//上拉输入
- GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化IO
- 第三步配置CAN相关参数 定义了一个CAN_InitTypeDef结构体CAN_InitStructure,用于配置CAN的工作模式和速率。在这里,设置了CAN的模式为正常模式,速率为1Mbps。同时,设置了同步跳转宽度(SJW)为1个时间单位,位时间1(BS1)为2个时间单位,位时间2(BS2)为3个时间单位,预分频器(Prescaler)为6。
通过CAN_Init函数对CAN进行初始化,传入了上述配置结构体。 然后,定义了一个CAN_FilterInitTypeDef结构体CAN_FilterInitStructure,用于配置CAN的过滤器。在这里,设置了过滤器0,使用标识符屏蔽模式,并且过滤掉所有的标识符和掩码。将过滤器与FIFO0相关联,并激活过滤器。通过CAN_FilterInit函数对CAN过滤器进行初始化,传入了上述配置结构体。 - CAN_InitTypeDef CAN_InitStructure;
-
- CAN_InitStructure.CAN_TTCM=DISABLE;
- CAN_InitStructure.CAN_ABOM=DISABLE;
- CAN_InitStructure.CAN_AWUM=ENABLE;
- CAN_InitStructure.CAN_NART=DISABLE;
- CAN_InitStructure.CAN_RFLM=DISABLE;
- CAN_InitStructure.CAN_TXFP=DISABLE;
- CAN_InitStructure.CAN_Mode= CAN_Mode_Normal; //模式设置
- //1Mbits 500K
- CAN_InitStructure.CAN_SJW = CAN_SJW_1tq;
- CAN_InitStructure.CAN_BS1 = CAN_BS1_2tq;
- CAN_InitStructure.CAN_BS2 = CAN_BS2_3tq;
- CAN_InitStructure.CAN_Prescaler = 6; //6分频
- CAN_Init(CAN1, &CAN_InitStructure);
- CAN_FilterInitTypeDef CAN_FilterInitStructure;
- CAN_FilterInitStructure.CAN_FilterNumber = 0; //过滤器0
- CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdMask;
- CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_32bit; //32位
- CAN_FilterInitStructure.CAN_FilterIdHigh = 0x0000;////32位ID
- CAN_FilterInitStructure.CAN_FilterIdLow = 0x0000;
- CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0x0000;//32位MASK
- CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0x0000;
- CAN_FilterInitStructure.CAN_FilterFIFOAssignment = CAN_Filter_FIFO0;//过滤器0关联到FIFO0
- CAN_FilterInitStructure.CAN_FilterActivation = ENABLE;
- CAN_FilterInit(&CAN_FilterInitStructure);
- 第四步
- 通过CAN_ITConfig函数使能CAN1的FIFO0接收中断。
然后,定义了一个NVIC_InitTypeDef结构体NVIC_InitStructure,用于配置CAN接收中断的中断优先级。在这里,设置了中断通道为USB_LP_CAN1_RX0_IRQn,主优先级为1,次优先级为0,并使能中断。 最后,在CAN_Config函数中进行了CAN总线的配置和初始化,并完成了中断的设置。
CAN接收逻辑实现中断方式 - //CAN接收数据的函数
- void USB_LP_CAN1_RX0_IRQHandler(void)
- {
- if(CAN_GetITStatus(CAN1, CAN_IT_FMP0) != RESET)//查询标志位
- {
- CAN_Receive(CAN1, CAN_FIFO0, &RxMessage); //接收信息
-
- // 打印接收到的数据
- printf("Rece CAN message: ID:0x%02X, DLC:%d, Data:", RxMessage.StdId, RxMessage.DLC);
- for(uint8_t i = 0; i < RxMessage.DLC; i++)
- {
- printf("%02X ", RxMessage.Data[i]);
- }
- printf("\n");
- //CAN_BAOWENJIANCE()
- //打印信息 串口1 串口2 printf都可以
-
- CAN_ClearITPendingBit(CAN1, CAN_IT_FMP0); // 清除中断标志位
- }
- }
CAN发送逻辑的实现- //CAN发送数据的接口函数
- uint8_t CAN_SendMessage(uint32_t StdId, uint8_t* pData, uint8_t Length)
- {
- uint8_t MailBox = 0;
- TxMessage.StdId = StdId;
- TxMessage.ExtId = 0x00;
- TxMessage.IDE = CAN_ID_STD;
- TxMessage.RTR = CAN_RTR_DATA;
- TxMessage.DLC = Length;
- for (uint8_t i = 0; i < Length; i++)
- {
- TxMessage.Data[i] = pData[i];//发送的数据赋值
- }
-
- // 打印接发送的数据
- printf("Send CAN message: ID:0x%02X, DLC:%d, Data:", TxMessage.StdId, TxMessage.DLC);
- for(uint8_t i = 0; i < TxMessage.DLC; i++)
- {
- printf("%02X ", TxMessage.Data[i]);
- }
- printf("\n");
-
- MailBox = CAN_Transmit(CAN1, &TxMessage);
- while((CAN_TransmitStatus(CAN1, MailBox)==CAN_TxStatus_Failed));
- return TxMessage.DLC; //返回值是发送了几个字节
- }
发送信息这是一条标准数据帧 由MCU发出 - //发送信息在这里填写
- uint32_t StdId = 0x55;//数据帧ID
- uint8_t TxData[8] = {0x01, 0x23, 0x45, 0x67, 0x89, 0xAB, 0xCD, 0xEF};//8字节数据内容
- uint8_t Length = 8;//发送字节个数
接收信息这是一条标准数据帧 由

上位机CAN调试助手发出
测试效果

转载自: 小李的创客实验室
如有侵权请联系删除
|  微信公众号
微信公众号
 手机版
手机版