|
1.DS18B20简介 DS18B20是由DALLAS半导体公司推出的一种单总线接口的温度传感器,与传统的热敏电阻等测温元件相比,它是一种新型的体积小、用电压宽、与微处理器接口简单的数字化温度传感器。DS18B20的内部结构如下图示 
ROM中的64位序列号是出厂前就被光刻好的,可以看做是DS18B20的地址序列号。64位光刻ROM的排列是:8位产品类型标号+48位DS18B20序列号+8位循环冗余校验码。光刻ROM 的作用是使每一个DS18B20都各不相同,这样就可以实现一根总线上挂接多个DS18B20 DS18B20的内部存储器(9个字节)包括一个高速暂存器RAM和一个EEPROM,EEPROM里存放高温和低温触发器和配置寄存器,存储器详细组成见下图: 
配置寄存器是配置不同的位数来确定温度和数字的转化,其结构下图示:低五位都是1,TM是测试模式位(设置工作模式或测试模式,默认为0即工作模式),R1和R0用来设置精度,可设9~12位精度,对应的温度分辨率为0.5, 0.25, 0.125, 0.0625℃ 
所有的单总线器件都要求采样严格的信号时序,以保证设局的完整性。DS18B20的时序有:初始化时序、写(0和1)时序、读(0和1)时序。DS18B20发送所有的命令和数据都是字节的低位在前,下面介绍这几个信号的时序: ⏩ 初始化时序 内置闪存模块可以在通用地址空间直接寻址,任何32位数据的读操作都能访问闪存模块的内容并得到相应的数据。 
⏩ 写时序 写时序包括写0和写1时序。所有写时序至少需要60us,并且在2次独立的写时序之间至少需要1us的恢复时间,两种写时序均起始于主机拉低总线。写1时序,主机输出低电平,延时2us,然后释放总线,延时60us;写0时序,主机输出低电平,延时60us,然后释放总线,延时2us。写时序图如下 
⏩ 读时序 单总线器件仅在主机发出读时序时,才向主机传输数据,所以在主机发出读数据命令后,必须马上产生读时序,以便从机能够传输数据。所有读时序至少需要60us,且在2次独立的读时序之间至少需要1us的恢复时间。每个读时序都由主机发起,至少拉低总线1us,主机在读时序器件必须释放总线,并且在时序起始后的15us之内采样总线状态。典型的读时序过程为,主机输出低电平延时2us,然后主机转入输入模式延时12us,然后读取单总线当前的电平,然后延时50us 
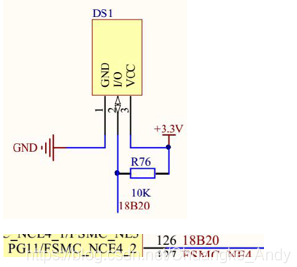
DS18B20的典型温度读取过程:复位 --> 发SKIP ROM命令(0XCC) --> 发开始转换命令(0X44) --> 延时 --> 复位 --> 发SKIP ROM命令(0XCC) --> 发读存储器命令(0XBE) --> 连续读出两个字节数据(即温度) --> 结束 2.硬件设计 D1指示灯用来提示系统运行状态,DS18B20温度传感器用来检测环境温度,串口1用来打印温度值 指示灯D1 USART1串口 DS18B20 TIM7(提供us延时) 
3.软件设计 3.1 STM32CubeMX设置 ➡️ RCC设置外接HSE,时钟设置为72M ➡️ PC0设置为GPIO推挽输出模式、上拉、高速、默认输出电平为高电平 ➡️ USART1选择为异步通讯方式,波特率设置为115200Bits/s,传输数据长度为8Bit,无奇偶校验,1位停止位 ➡️ PG11设置为GPIO推挽输出模式、上拉、高速 ➡️ 激活TIM7,预分频因子设为72-1,向上计数,自动重载值为65535;因此计数器CNT_CLK = 1MHz,计数器周期为1us 
➡️输入工程名,选择路径(不要有中文),选择MDK-ARM V5;勾选Generated periphera initialization as a pair of ‘.c/.h’ files per IP ;点击GENERATE CODE,生成工程代码 3.2 MDK-ARM软件编程 ➡️ 在tim.c文件下实现微秒延时(us)函数
➡️ 创建按键驱动文件ds18b20.c 和相关头文件ds18b20.h
➡️ 在main.c文件下编写ds18b20测试代码
4.下载验证 编译无误下载到开发板后,可以看到D1指示灯不断闪烁,串口不断打印出当前温度值 
转载自: 嵌入式攻城狮 如有侵权请联系删除 |
【STM32U3评测】使用INS5699 RTC模组
【 逢7发帖赢大礼】1、利用CubeMX生成正点原子H7R7开发板的STM32CubeIDE工程
CubeMX生成CubeIDE工程代码乱码
【逢7发帖赢大礼】STM32开发之指纹识别!
【逢7发帖赢大礼】STM32开发之环境空气质量监测
【逢7发帖赢大礼】STM32开发之人体实时运动信息监测!
【逢7发帖赢大礼】全网最简单的Arduino_STM32开发环境搭建教程!
【STM32U3评测】低功耗模式功耗测量
【STM32N6570-DK评测】3.CubeMX关于DCMIPP和CSI的BUG整理及摄像头使用
【STM32U3评测】并不优雅的点亮WS2812
 微信公众号
微信公众号
 手机版
手机版