PWM舵机控制
硬件清单- 180°舵机
- 270°舵机
- 360°舵机
- STM/GD32F103C8T6核心板
- 杜邦线
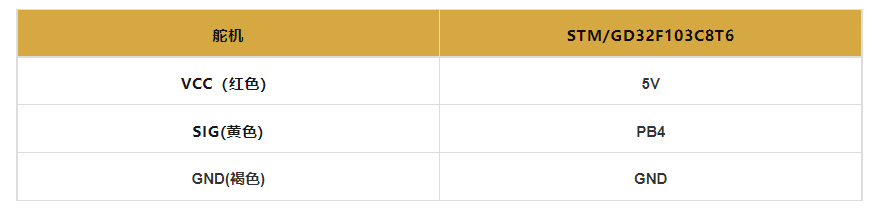
硬件接线
一、标准/连续旋转舵机
PWM舵机的控制原理基于脉宽调制技术。
1、标准舵机(180°/270°)通过改变PWM信号来控制脉冲的高电平时间,从而来控制舵机旋转的角度2、连续旋转舵机(360°)
通过改变PWM信号来控制脉冲的高电平时间,从而来控制舵机的速度和方向
二、舵机控制思路
控制信号以固定频率的方波形式发送给舵机;这个方波的周期通常为20ms,即50Hz的频率;
在控制信号中,脉冲的高电平时间决定舵机旋转的角度或旋转速度和方向。

三、PWM实现思路 1、时钟使能 - //TIM3时钟使能
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
- //使能GPIOB端口时钟和AFIO时钟
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
2、配置GPIO为复用功能及时钟使能 - // 配置GPIO为复用功能
- GPIO_InitTypeDef GPIO_InitStructure;
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; // 设置要配置的引脚
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 设置引脚模式为复用推挽模式
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 设置引脚的速度
- GPIO_Init(GPIOB, &GPIO_InitStructure); // 初始化GPIO配置
- // 禁用JTAG 启用SWD
- GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);
- // 把TIM3_CH1功能部分映射到PB4引脚上
- GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);
由于使用的是PB4引脚,需要将TIM3_CH1功能部分映射到PB4引脚上
3、配置定时器3为PWM模式 - // 配置TIM3为PWM模式
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- TIM_TimeBaseStructure.TIM_Period = 20000 - 1; // PWM周期,即计数周期20ms,PWM信号频率为50HZ
- TIM_TimeBaseStructure.TIM_Prescaler = 72 - 1; // 预分频系数,定时器时钟频率为72MHz/72=1MHz
- TIM_TimeBaseStructure.TIM_ClockDivision = 0; // 时钟分频
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; // 计数模式为向上计数
- TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
4、配置TIM3的通道1为PWM输出 - // 配置TIM3的通道1为PWM输出
- TIM_OCInitTypeDef TIM_OCInitStructure;
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // PWM模式1
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 输出使能
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; // 输出极性为高电平
- TIM_OCInitStructure.TIM_Pulse = 0; // 初始占空比
- TIM_OC1Init(TIM3, &TIM_OCInitStructure);
- TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable); // 开启OC1预加载寄存器
- TIM_ARRPreloadConfig(TIM3, ENABLE);// 使能自动重装载寄存器
- // 使能TIM3定时器
- TIM_Cmd(TIM3, ENABLE);
四、主要函数 此处代码以180°舵机演示 1、main.c - if(Data_Flag == 1)
- {
- int Servo_Degree = strtol(Data_Buffer, NULL, 10);//将数组中的数据转换成整数
- printf("%s\n",Data_Buffer);//打印数组中的字符串
- printf("舵机目前角度 = %d°\n",Servo_Degree);//打印转化后的数据
- Degree_Conv_PWM(Servo_Degree);//控制舵机旋转角度
- Data_Flag = 0;//标志位重置
- memset(Data_Buffer, 0, sizeof(Data_Buffer));//清除数组中的数据
- }
使用轮询的方式判断是否接收到正确的数据,根据串口数据控制舵机运转
2、PWM.c - void Degree_Conv_PWM(int Servo_Degree)// 将接收的数据转换成PWM高电平脉宽
- {
- float PWM_Time;
- PWM_Time = (2000.0 * (Servo_Degree / 180.0)) + 500;
- TIM_SetCompare1(TIM3, (int)PWM_Time);//定时器设置比较值函数和通道有关 时间参数单位是us
- }
使用强制类型转换是为了保证精度,最后传递给定时器一个整数比较值
3、Usart.c - int fputc(int ch, FILE *f)// printf()函数重定向
- {
- // 发送一个字符到USART1
- USART_SendData(USART1, (uint16_t)ch);
- // 等待发送完成
- while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
- return ch;
- }
- void USART1_IRQHandler(void)//串口中断函数
- {
- if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
- {
- Rx_Buffer[Rx_Index] = USART_ReceiveData(USART1);// 从串口接收数据到缓冲区
- if(Rx_Buffer[Rx_Index] == '[/align][b][b][font=Tahoma][size=3][color=#000000][b][b][font=Tahoma][size=3][color=#000000]
- [/color][/size][/font][/b][/b]
- Usart1:串口中断接收以“$”开头,“#”结尾的数据[/color][/size][/font][/b][/b]
- [align=left][b][b][b][b][font=Tahoma][size=3][color=#ff8c00]4、SysTick.c[/color][/size][/font][/b][/b][/b][/b][/align][align=left][code]void Delay_us(uint16_t us)
- {
- SysTick->CTRL = 0;// SysTick控制寄存器清零,停止SysTick定时器
- SysTick->LOAD = 72*us - 1;// 设置SysTick加载寄存器的值,确定延时的时间
- SysTick->VAL = 0;// 将SysTick当前值寄存器清零
- SysTick->CTRL = 5;// 设置SysTick控制寄存器,使其开始倒数计数,并启用SysTick定时器
- while((SysTick->CTRL & 0x00010000) == 0);// 等待SysTick定时器倒数完成
- SysTick->CTRL = 0;// 再次将SysTick控制寄存器清零,停止SysTick定时器
- }
五、实践 通过串口发送指令控制舵机(180°舵机演示) 1、UartAssist 注意:串口、波特率、以及数据格式等
2、现象 180°/270°舵机可以通过串口发送的指令控制舵机旋转的角度; 360°舵机可以通过串口发送的指令控制舵机旋转的方向和速度。
转载自: W-ML 如有侵权请联系删除
)// 如果数据是以$开头则开始存储数据
{
memset(Rx_Buffer, 0, sizeof(Rx_Buffer));// 清空接收缓冲区
Rx_Buffer[0] = '
Usart1:串口中断接收以“$”开头,“#”结尾的数据
4、SysTick.c - void Delay_us(uint16_t us)
- {
- SysTick->CTRL = 0;// SysTick控制寄存器清零,停止SysTick定时器
- SysTick->LOAD = 72*us - 1;// 设置SysTick加载寄存器的值,确定延时的时间
- SysTick->VAL = 0;// 将SysTick当前值寄存器清零
- SysTick->CTRL = 5;// 设置SysTick控制寄存器,使其开始倒数计数,并启用SysTick定时器
- while((SysTick->CTRL & 0x00010000) == 0);// 等待SysTick定时器倒数完成
- SysTick->CTRL = 0;// 再次将SysTick控制寄存器清零,停止SysTick定时器
- }
五、实践 通过串口发送指令控制舵机(180°舵机演示) 1、UartAssist 注意:串口、波特率、以及数据格式等
2、现象 180°/270°舵机可以通过串口发送的指令控制舵机旋转的角度; 360°舵机可以通过串口发送的指令控制舵机旋转的方向和速度。
转载自: W-ML 如有侵权请联系删除
;
Rx_Index = 1;
}
else if(Rx_Buffer[Rx_Index] == '#' && Rx_Buffer[0] == '
Usart1:串口中断接收以“$”开头,“#”结尾的数据
4、SysTick.c [ DISCUZ_CODE_7 ] 使用系统滴答定时器来控制延时
五、实践 通过串口发送指令控制舵机(180°舵机演示) 1、UartAssist 注意:串口、波特率、以及数据格式等
2、现象 180°/270°舵机可以通过串口发送的指令控制舵机旋转的角度; 360°舵机可以通过串口发送的指令控制舵机旋转的方向和速度。
转载自: W-ML 如有侵权请联系删除
)// 如果数据是以#结尾则结束数据存储并打印数据信息
{
printf("Received: %sundefined", Rx_Buffer);// 打印接收到的数据
memcpy(Data_Buffer, Rx_Buffer + 1, 3);// 使用memcpy函数进行数组内容复制
memset(Rx_Buffer, 0, sizeof(Rx_Buffer));// 清空接收缓冲区
Rx_Index = 0;// 重置索引
Data_Flag = 1;// 数据标志位
}
else
{
Rx_Index++;// 增加索引,准备接收下一个字符
}
}
}[/code]
Usart1:串口中断接收以“$”开头,“#”结尾的数据
4、SysTick.c [ DISCUZ_CODE_7 ] 使用系统滴答定时器来控制延时
五、实践 通过串口发送指令控制舵机(180°舵机演示) 1、UartAssist 注意:串口、波特率、以及数据格式等
2、现象 180°/270°舵机可以通过串口发送的指令控制舵机旋转的角度; 360°舵机可以通过串口发送的指令控制舵机旋转的方向和速度。
转载自: W-ML 如有侵权请联系删除
| 

 微信公众号
微信公众号
 手机版
手机版