01. 概述
FreeRTOS中创建和删除任务API函数的应用。使用静态方法创建任务,任务的堆栈、任务控制块就需要有用户来指定。
02. 功能描述
设计三个任务:start_task、task1_task和task2_task,这三个任务的功能分别如下:
start_task: 用来创建其它两个任务。
task1_task: 当此任务运行5秒以后就会调用函数vTaskDelete()删除任务task2_task,该任务控制LED0的闪烁,并且周期性的输出信息到串口中。
task2_task:普通的应用任务,此任务控制LED1的闪烁,并且周期性的输出信息到串口中。
03. 任务设计
系统设置
在FreeRTOSConfig.h文件中需要将宏configSUPPORT_STATIC_ALLOCATION设置为1.
- #define configSUPPORT_STATIC_ALLOCATION 1 //静态内存
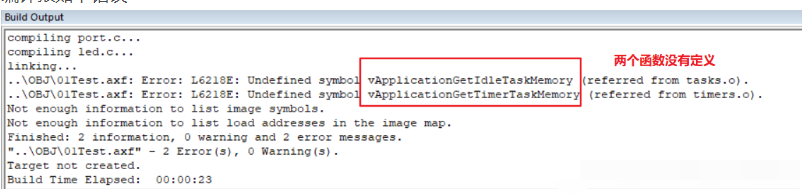
编译报如下错误
![]L770WQ6NJGA4QU~59]7%K0.png](data/attachment/forum/202203/25/143658ql50z4h2ayc6y0tc.png "]L770WQ6NJGA4QU~59]7%K0.png")
使用静态的方法创建任务我们需要自己实现函数vApplicationGetTimerTaskMemory()和函数vApplicationGetIdleTaskMemory()。
- //空闲任务任务堆栈
- static StackType_t IdleTaskStack[configMINIMAL_STACK_SIZE];
- //空闲任务控制块
- static StaticTask_t IdleTaskTCB;
- //定时器服务任务堆栈
- static StackType_t TimerTaskStack[configTIMER_TASK_STACK_DEPTH];
- //定时器服务任务控制块
- static StaticTask_t TimerTaskTCB;
- //ppxIdleTaskTCBBuffer:任务控制块内存
- //ppxIdleTaskStackBuffer:任务堆栈内存
- //pulIdleTaskStackSize:任务堆栈大小
- void vApplicationGetIdleTaskMemory(StaticTask_t **ppxIdleTaskTCBBuffer,
- StackType_t **ppxIdleTaskStackBuffer,
- uint32_t *pulIdleTaskStackSize)
- {
- *ppxIdleTaskTCBBuffer=&IdleTaskTCB;
- *ppxIdleTaskStackBuffer=IdleTaskStack;
- *pulIdleTaskStackSize=configMINIMAL_STACK_SIZE;
- }
- //获取定时器服务任务的任务堆栈和任务控制块内存
- //ppxTimerTaskTCBBuffer:任务控制块内存
- //ppxTimerTaskStackBuffer:任务堆栈内存
- //pulTimerTaskStackSize:任务堆栈大小
- void vApplicationGetTimerTaskMemory(StaticTask_t **ppxTimerTaskTCBBuffer,
- StackType_t **ppxTimerTaskStackBuffer,
- uint32_t *pulTimerTaskStackSize)
- {
- *ppxTimerTaskTCBBuffer=&TimerTaskTCB;
- *ppxTimerTaskStackBuffer=TimerTaskStack;
- *pulTimerTaskStackSize=configTIMER_TASK_STACK_DEPTH;
- }
任务优先级,堆栈大小,任务句柄和任务函数
start_task函数- //开始任务任务函数
- void start_task(void *pvParameters)
- {
- taskENTER_CRITICAL(); //进入临界区
- //创建TASK1任务
- Task1Task_Handler=xTaskCreateStatic((TaskFunction_t )task1_task,
- (const char* )"task1_task",
- (uint32_t )TASK1_STK_SIZE,
- (void* )NULL,
- (UBaseType_t )TASK1_TASK_PRIO,
- (StackType_t* )Task1TaskStack,
- (StaticTask_t* )&Task1TaskTCB);
- //创建TASK2任务
- Task2Task_Handler=xTaskCreateStatic((TaskFunction_t )task2_task,
- (const char* )"task2_task",
- (uint32_t )TASK2_STK_SIZE,
- (void* )NULL,
- (UBaseType_t )TASK2_TASK_PRIO,
- (StackType_t* )Task2TaskStack,
- (StaticTask_t* )&Task2TaskTCB);
- vTaskDelete(StartTask_Handler); //删除开始任务
- taskEXIT_CRITICAL(); //退出临界区
- }
task1_task函数
- //任务1
- void task1_task(void *pvParameters)
- {
- u8 task1_num = 0;
-
- while(1)
- {
- task1_num++;
- LED0 = !LED0;
- printf("任务1已经运行%d次\r\n", task1_num);
-
- if (5 == task1_num)
- {
- //任务1删除任务2
- vTaskDelete(Task2Task_Handler);
- printf("任务1删除了任务2\r\n");
- }
-
- //延时1秒 1000个时钟节拍
- vTaskDelay(1000);
- }
- }
task2_task函数
- //任务2
- void task2_task(void *pvParameters)
- {
- u8 task2_num = 0;
-
- while(1)
- {
- task2_num++;
- LED1 = !LED1;
- printf("任务2已经执行了%d次\r\n", task2_num);
-
- //延时1秒 1000个时钟节拍
- vTaskDelay(1000);
- }
- }
04. 程序设计
main.c文件
- #include "sys.h"
- #include "delay.h"
- #include "usart.h"
- #include "led.h"
- #include "FreeRTOS.h"
- #include "task.h"
- //空闲任务任务堆栈
- static StackType_t IdleTaskStack[configMINIMAL_STACK_SIZE];
- //空闲任务控制块
- static StaticTask_t IdleTaskTCB;
- //定时器服务任务堆栈
- static StackType_t TimerTaskStack[configTIMER_TASK_STACK_DEPTH];
- //定时器服务任务控制块
- static StaticTask_t TimerTaskTCB;
- //任务优先级
- #define START_TASK_PRIO 1
- //任务堆栈大小
- #define START_STK_SIZE 128
- //任务堆栈
- StackType_t StartTaskStack[START_STK_SIZE];
- //任务控制块
- StaticTask_t StartTaskTCB;
- //任务句柄
- TaskHandle_t StartTask_Handler;
- //任务函数
- void start_task(void *pvParameters);
- //任务优先级
- #define TASK1_TASK_PRIO 2
- //任务堆栈大小
- #define TASK1_STK_SIZE 50
- //任务堆栈
- StackType_t Task1TaskStack[TASK1_STK_SIZE];
- //任务控制块
- StaticTask_t Task1TaskTCB;
- //任务句柄
- TaskHandle_t Task1Task_Handler;
- //任务函数
- void task1_task(void *pvParameters);
- //任务优先级
- #define TASK2_TASK_PRIO 3
- //任务堆栈大小
- #define TASK2_STK_SIZE 50
- //任务堆栈
- StackType_t Task2TaskStack[TASK2_STK_SIZE];
- //任务控制块
- StaticTask_t Task2TaskTCB;
- //任务句柄
- TaskHandle_t Task2Task_Handler;
- //任务函数
- void task2_task(void *pvParameters);
- //ppxIdleTaskTCBBuffer:任务控制块内存
- //ppxIdleTaskStackBuffer:任务堆栈内存
- //pulIdleTaskStackSize:任务堆栈大小
- void vApplicationGetIdleTaskMemory(StaticTask_t **ppxIdleTaskTCBBuffer,
- StackType_t **ppxIdleTaskStackBuffer,
- uint32_t *pulIdleTaskStackSize)
- {
- *ppxIdleTaskTCBBuffer=&IdleTaskTCB;
- *ppxIdleTaskStackBuffer=IdleTaskStack;
- *pulIdleTaskStackSize=configMINIMAL_STACK_SIZE;
- }
- //获取定时器服务任务的任务堆栈和任务控制块内存
- //ppxTimerTaskTCBBuffer:任务控制块内存
- //ppxTimerTaskStackBuffer:任务堆栈内存
- //pulTimerTaskStackSize:任务堆栈大小
- void vApplicationGetTimerTaskMemory(StaticTask_t **ppxTimerTaskTCBBuffer,
- StackType_t **ppxTimerTaskStackBuffer,
- uint32_t *pulTimerTaskStackSize)
- {
- *ppxTimerTaskTCBBuffer=&TimerTaskTCB;
- *ppxTimerTaskStackBuffer=TimerTaskStack;
- *pulTimerTaskStackSize=configTIMER_TASK_STACK_DEPTH;
- }
- //主函数
- int main(void)
- {
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组4
- delay_init(168); //初始化延时函数
- uart_init(115200); //初始化串口
- LED_Init(); //初始化LED端口
-
- //创建开始任务
- StartTask_Handler=xTaskCreateStatic((TaskFunction_t )start_task, //任务函数
- (const char* )"start_task", //任务名称
- (uint32_t )START_STK_SIZE, //任务堆栈大小
- (void* )NULL, //传递给任务函数的参数
- (UBaseType_t )START_TASK_PRIO, //任务优先级
- (StackType_t* )StartTaskStack, //任务堆栈
- (StaticTask_t* )&StartTaskTCB); //任务控制块
- vTaskStartScheduler(); //开启任务调度
- }
- //开始任务任务函数
- void start_task(void *pvParameters)
- {
- taskENTER_CRITICAL(); //进入临界区
- //创建TASK1任务
- Task1Task_Handler=xTaskCreateStatic((TaskFunction_t )task1_task,
- (const char* )"task1_task",
- (uint32_t )TASK1_STK_SIZE,
- (void* )NULL,
- (UBaseType_t )TASK1_TASK_PRIO,
- (StackType_t* )Task1TaskStack,
- (StaticTask_t* )&Task1TaskTCB);
- //创建TASK2任务
- Task2Task_Handler=xTaskCreateStatic((TaskFunction_t )task2_task,
- (const char* )"task2_task",
- (uint32_t )TASK2_STK_SIZE,
- (void* )NULL,
- (UBaseType_t )TASK2_TASK_PRIO,
- (StackType_t* )Task2TaskStack,
- (StaticTask_t* )&Task2TaskTCB);
- vTaskDelete(StartTask_Handler); //删除开始任务
- taskEXIT_CRITICAL(); //退出临界区
- }
- //任务1
- void task1_task(void *pvParameters)
- {
- u8 task1_num = 0;
-
- while(1)
- {
- task1_num++;
- LED0 = !LED0;
- printf("任务1已经运行%d次\r\n", task1_num);
-
- if (5 == task1_num)
- {
- //任务1删除任务2
- vTaskDelete(Task2Task_Handler);
- printf("任务1删除了任务2\r\n");
- }
-
- //延时1秒 1000个时钟节拍
- vTaskDelay(1000);
- }
- }
- //任务2
- void task2_task(void *pvParameters)
- {
- u8 task2_num = 0;
-
- while(1)
- {
- task2_num++;
- LED1 = !LED1;
- printf("任务2已经执行了%d次\r\n", task2_num);
-
- //延时1秒 1000个时钟节拍
- vTaskDelay(1000);
- }
- }
05. 结果验证
任务1运行5秒中之后删除了任务2,任务2被删除之后就不会被运行。最后只剩下任务1运行了。
|
.png) STMCU小助手
发布时间:2022-3-26 14:00
STMCU小助手
发布时间:2022-3-26 14:00
 微信公众号
微信公众号
 手机版
手机版