.png) STMCU小助手
发布时间:2022-4-15 11:00
STMCU小助手
发布时间:2022-4-15 11:00
|
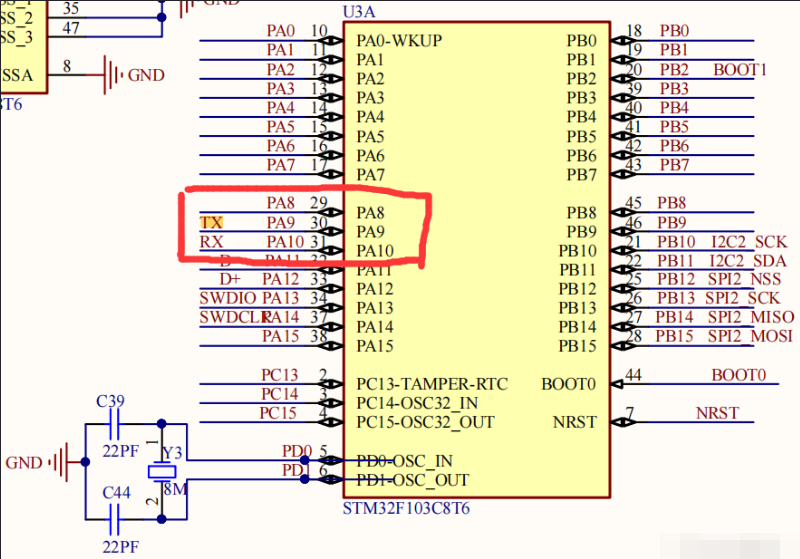
前言 这次我用的板子是一个用STM32F103C8T6作为主控芯片的一个数据采集卡,两个LED灯连接的引脚是PB3与PB4,TX与RX引脚分别是PA9和PA10。 ![5]{B4~8{`U1E9]{KV)1P5%I.png](data/attachment/forum/202204/14/110859s0m9r2wmjt89ot26.png "5]{B4~8{`U1E9]{KV)1P5%I.png")
![Z}QVG)L}6`41VSN1_J)]39B.png](data/attachment/forum/202204/14/110859a4xgd94mls24gind.png "Z}QVG)L}6`41VSN1_J)]39B.png")
一、配置CubeMX 1、新建工程; 2、配置时钟源,在RCC里面的HSE配置的是晶振时钟; 3、配置程序烧录引脚SYS为SWD模式; 4、配置GPIO口,配置一个LED灯(我的板子是PB3),起到串口成功接收到数据时的指示作用; 5、配置串口收发引脚 此处我们采用的通信方式为UART通信(异步全双工串口通信),PA9作为TX,PA10作为RX使用。直接在可视框图里点击相应的引脚进行配置。 配置到目前,效果图为: WLE5206B@5M4D%)L5_5DH.png")
可以发现,TX和RX两个引脚配置完之后是黄色的,代表还没有配置完毕,下面继续进行配置。 6、在左边的"Connectivity”里面的USART1模式里选择异步全双工通信模式asynchronous ⮚点击USATR1 ⮚设置MODE为异步通信(Asynchronous) ⮚基础参数:波特率为115200 Bits/s。传输数据长度为8 Bit。奇偶检验无,停止位1,接收和发送都使能 ⮚GPIO引脚设置 USART1_RX/USART_TX ⮚NVIC Settings 一栏使能接收中断 这里简单扩展一下: STM32F103系列单片机共有5个串口,其中1-3是通用同步/异步串行接口USART(Universal Synchronous/Asynchronous Receiver/Transmitter),4,、5是通用异步串行接口UART(Universal Asynchronous Receiver/Transmitter)。 

LH7Q[)EF$JCO1(3M2HQ3.png")
7、配置时钟树,我还是开到最高的72MHz 8、进行项目设置,最后生成代码,CubeMX部分就大功告成了 二、HAL库UART相关函数简介 2.1 串口发送/接收函数
这六个函数参数基本一致,发送/接收各挑一个常用的函数进行简单介绍: 串口发送数据:
功能: 串口发送指定长度的数据。如果超时没发送完成,则不再发送,返回超时标志(HAL_TIMEOUT)。 参数: ⮚ UART_HandleTypeDef *huart UART的别名 如 : UART_HandleTypeDef huart1; 别名就是huart1 ⮚ *pData 需要发送的数据 ⮚ Size 发送的字节数 ⮚ Timeout 最大发送时间,发送数据超过该时间退出发送 举例: HAL_UART_Transmit(&huart1, (uint8_t *)ZZX, 3, 0xffff); //串口发送三个字节数据,最大传输时间0xffff 串口接收数据:
功能: 串口中断接收,以中断方式接收指定长度数据。 大致过程是,设置数据存放位置,接收数据长度,然后使能串口接收中断。接收到数据时,会触发串口中断。再然后,串口中断函数处理,直到接收到指定长度数据,而后关闭中断,进入中断接收回调函数,不再触发接收中断。(只触发一次中断) 参数: ⮚ UART_HandleTypeDef *huart UART的别名 ⮚ *pData 接收到的数据存放地址 ⮚ Size 接收的字节数 举例: HAL_UART_Receive_IT(&huart1,(uint8_t *)&value,1); //中断接收一个字符,存储到value中 2.2 串口中断函数
串口接收中断回调函数:
功能: HAL库的中断进行完之后,并不会直接退出,而是会进入中断回调函数中,用户可以在其中设置代码,串口中断接收完成之后,会进入该函数,该函数为空函数,用户需自行修改。 参数: ⮚ UART_HandleTypeDef *huart UATR的别名 举例: HAL_UART_RxCpltCallback(&huart1){ //用户设定的代码 // } 串口中断处理函数:
功能: 对接收到的数据进行判断和处理,判断是发送中断还是接收中断,然后进行数据的发送和接收,在中断服务函数中使用。 如果接收数据,则会进行接收中断处理函数
如果发送数据,则会进行发送中断处理函数
2.3 串口查询函数
举例:
三、逻辑代码部分 3.1 UART接收中断 因为中断接收函数只能触发一次接收中断,所以我们需要在中断回调函数中再调用一次中断接收函数。 具体流程: 1、初始化串口 2、在main中第一次调用接收中断函数 3、进入接收中断,接收完数据 进入中断回调函数 4、修改HAL_UART_RxCpltCallback中断回调函数,处理接收的数据, 5、回调函数中要调用一次HAL_UART_Receive_IT函数,使得程序可以重新触发接收中断 函数流程: ①HAL_UART_Receive_IT (中断接收函数) -> ②USART2_IRQHandler(void) (中断服务函数) -> ③HAL_UART_IRQHandler(UART_HandleTypeDef *huart) (中断处理函数) -> ④UART_Receive_IT(UART_HandleTypeDef *huart) (接收函数) -> ⑤HAL_UART_RxCpltCallback(huart) (中断回调函数) HAL_UART_RxCpltCallback函数就是用户要重写在main.c里的回调函数。 代码实现: 在main.c中添加下列定义:
在main()主函数中,调用一次接收中断函数
在main.c下方添加中断回调函数
现象: 使用USB转TTL(CH340)进行数据发送,XCOM V2.6串口助手进行调试,发送“1”(这里要注意波特率等参数要设置的和之前配置的相同) 
在debug模式下,将缓冲计数值UART1_Rx_Cnt加入监视器,串口接收到发来的数据后,计数值+1. 
同时也可以看到LED灯状态翻转 3.2 UART发送 重新定义printf函数 在 stm32f1xx_hal.c中包含#include <stdio.h>
在main.c中添加
现象: 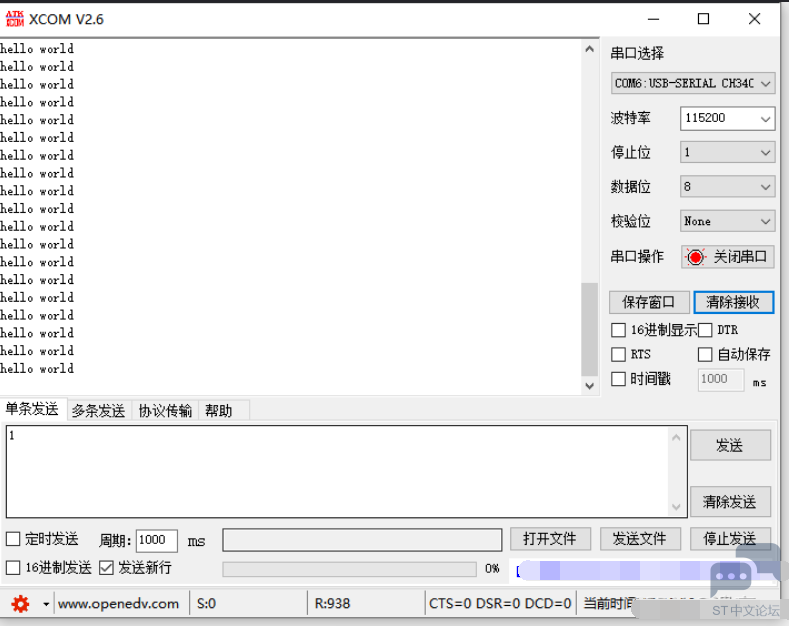
注意: 重定义printf后,必须在target里面勾选上MicroLIB,调用一下这个微型库,不然一直卡在里面。 [(M~RB2.png")
|
【福利三:雨露均沾·逢7狂欢】之三:AI帮我查BUG
福利三:雨露均沾·逢7狂欢】之二:STM32F407VG串口通信乱码故障的排除
基于STM32F103的I2C主从机通信
OpenBLT移植到STM32F103战舰开发板上适用于所有STM32F103系列的Bootloader
TFT LCD 与 FSMC 的硬件连接大容量 STM32F10xxx FSMC 接口
单片机:初学者该了解的STM32F103基础知识
2025软件工具兔哥知道
STM32之继电器模块
STM32固件库分享,超全系列整理
【MCU实战经验】基于STM32F103的二轮平衡车(6轴上位机 源代...
 微信公众号
微信公众号
 手机版
手机版