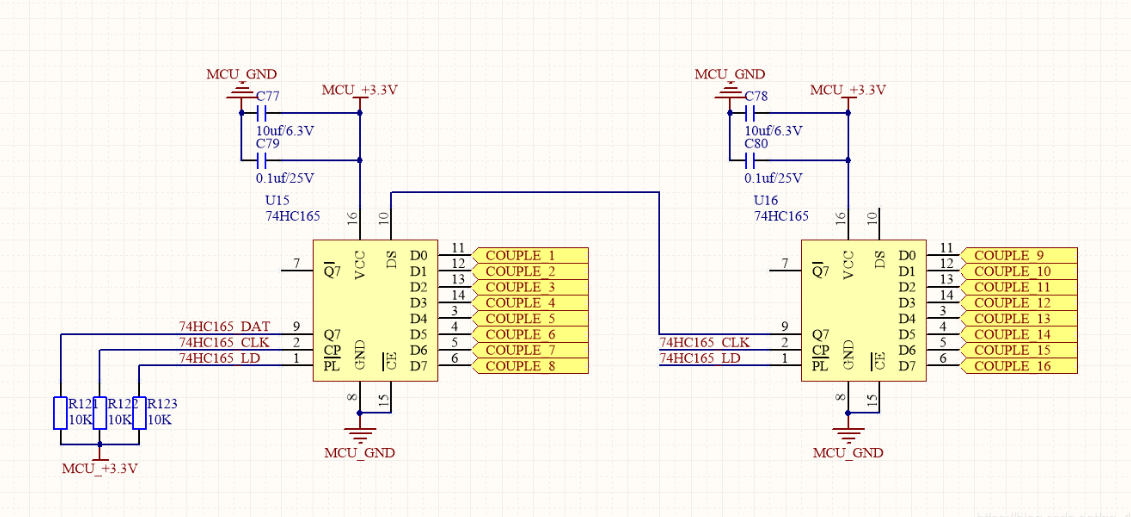
一、原理图
IGLR562[WW_@34@7WI.png")
二、时序图

三、驱动源码
- void couple_init(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOC|RCC_APB2Periph_AFIO, ENABLE); //使能PB,PE端口时钟
- GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
- GPIO_SetBits(GPIOB,GPIO_Pin_6);
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOC, &GPIO_InitStructure);
- GPIO_SetBits(GPIOC,GPIO_Pin_0);
- }
- void couple_delay(u8 i)
- {
- while(i--);
- }
- u16 read_couple(void)
- {
- u8 i;
- u16 temp = 0;
- couple_ld = 0; //PL拉低,读取按键状态
- couple_ld = 1; //PL拉高,停止按键读取
- if(couple_dat == 1) //等于1即并行输入D7引脚的按键被按下
- temp |= 0x01; //最低位置1表示按键被按下,反之则没按键被按下
- for(i = 0; i < 15; i ++) //因为最高位不用移位即可读取,故循环(16-1)次,依次把次高位移到最高位,第一级74HC165优先读取
- {
- temp = temp << 1;
- couple_clk = 0; //HC165_CLK = 0 ——> HC165_CLK = 1 产生上升沿,次高位D(n-1)移到高位D(n)
- couple_delay(10);
- couple_clk = 1;
- if(couple_dat == 1)
- temp |= 0x01;
- }
- return temp;
- }
|
.png) STMCU小助手
发布时间:2022-4-22 22:00
STMCU小助手
发布时间:2022-4-22 22:00
 微信公众号
微信公众号
 手机版
手机版