.png) STMCU小助手
发布时间:2022-5-5 16:45
STMCU小助手
发布时间:2022-5-5 16:45
|
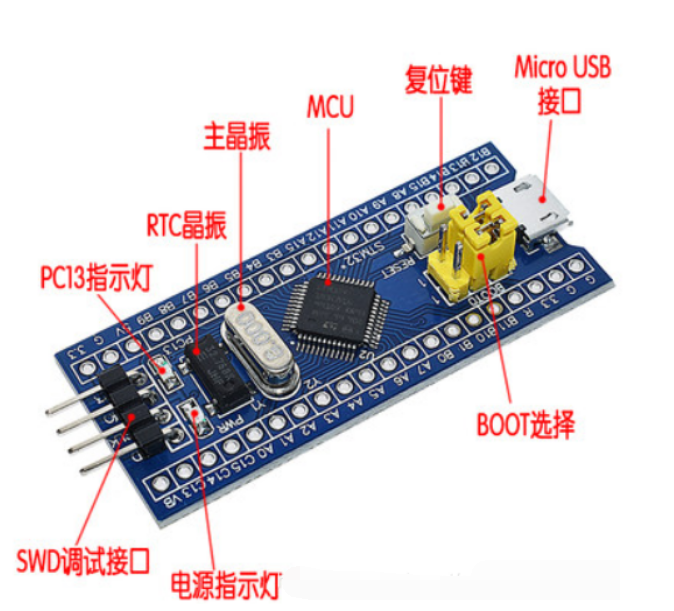
1 概述 部分实验代码已经上传。另外最小系统板和SPI触摸屏均购买于某宝,总成本42元包邮。 1.1 最小系统板资源概述 开发板:STM32F103C8T6最小系统板 CUBEMX版本:1.3.0 MDK版本:5.27 主控芯片型号:STM32F103C8T6 LCD屏幕参数:3.2寸LCD,SPI口,带触摸功能。 最小系统板如下 ![VA%2]OGDV5F[ISXY5$~LH$E.png](data/attachment/forum/202205/05/165354mb0n40umvphk3kns.png "VA%2]OGDV5F[ISXY5$~LH$E.png")
SPI触摸屏如下 ![]3`C1[V`FZX{]$B]0%JKF.png](data/attachment/forum/202205/05/165354bfzop0mgt0f401o5.png "]3`C1[V`FZX{]$B]0%JKF.png")
1.2 实现功能 购买的屏幕提供了驱动程序,但是没有C8T6的型号,需要进行移植,在最小系统板上实现触摸屏显示功能。 2 硬件介绍 2.1 最小系统板硬件介绍 最小系统板,除了一个PC13作为用户按键灯外全部GPIO口进行了引出,另外最小系统板不带EEPROM。无法移植屏幕触摸功能。 
2.2 LCD屏原理图 LCD屏集成触摸检测,集成一个SD卡插座,这里我们都用不到。 
2.3 连接关系 使用杜邦线进行连接,连接关系如下 
3 程序实现 3.1 代码架构 在原程序的基础上,进行删减工作,程序架构如下。 ![{_V7D_`~GS{H)0I]5447C10.png](data/attachment/forum/202205/05/165356vyn65fj0bf3zs7rj.png "{_V7D_`~GS{H)0I]5447C10.png")
3.2移植工作 1,删除hd.s文件增加md.s文件,,删除触摸相关部分代码,如IIC等。删除了touch相关的代码(最小系统板没有IIC,不支持)。 ![994GP~W7_Y23G9N4X]RLWT7.png](data/attachment/forum/202205/05/165356tzeitlfi46yztmth.png "994GP~W7_Y23G9N4X]RLWT7.png")
2,点击Keil的魔术棒,选择器件类型为STM32F103C8。 ![ECT1NP0(]OCH[TXJTT~8YGJ.png](data/attachment/forum/202205/05/165356spy237o5z14oo2py.png "ECT1NP0(]OCH[TXJTT~8YGJ.png")
3,在全局宏定义define中,hd改为md。 
4,修改GPIO口的定义 将购买SPI屏幕附赠的Demo程序里的GPIO口修改为实际单板的GPIO口。 3.3 SPI部分代码讲解 SPI2初始化,需要特别注意的是,SPI2是在APB1上,但是其使用的GPIO口是在APB2上,均需要使能其对应时钟。分频系数为2,时钟频率为36MHz/2=18MHz。使用SPI2的步骤为: 1,初始化SPI2的GPIO口; 2,初始化SPI2功能; 3,使能SPI2。 若需要将SPI2改到SPI1,在初始化这里,不仅需要改动GPIO口,还要注意SPI1在APB1上,另外最大时钟不能超过18MHz,因此分频系数需要改为4(72MHz/4)。在使用CUBEMX配置时,若分频系数设置错误,将会弹出错误警示框。
4 实验结果 实验结果与预期相同,实现了相关功能。64k的flash和20k的ram可以驱动显示屏,由于SPI速率的问题,刷新速度不如FSMC这种接口。 
5 迁移到RBT6开发板 5.1 单板连接 后续做了一个20PIN转14PIN的转接板,将程序移植到了RBT6开发板上。这样就不需要繁杂的飞线,便于拆装,也不容易出现硬件故障。转接板的连接关系如下。 ![XT_1BXU)0U5AC]D{3B$SV7A.png](data/attachment/forum/202205/05/165358tyk90h94vvrrosok.png "XT_1BXU)0U5AC]D{3B$SV7A.png")
移植后的效果图如下 6 STM32F407的LCD程序的移植 后续将正点原子F407的LCD显示程序移植到了启明欣欣开发板,类似方法。这个屏幕时使用FSMC进行驱动,屏幕的主控芯片是9341,在移植过程中遇到了一个问题,折腾了好久才搞定。 
开发板LCD第2脚连接F407的A12,而正点原子定义的2脚连接到芯片的A6,这将导致读写数据指令时偏移地址的改变。在lcd.h文件中正点原子定义的偏移地址为0x7E,未改动时移植到启明开发板上LCD屏幕一直花屏。后来将偏移地址改为0x00001FFE后成功解决了此问题。
程序移植成功显示如下图,启明的开发板相对正点原子便宜非常多,但是例程很少,在解决LCD显示问题后,正点原子的大多数例程包括FreeRTOS等就可以愉快的进行移植修改玩耍了。正点原子的LCD.h文件兼容了很多他们家的屏幕,编译后比较臃肿,经过一番优化后,lcd.c源码减少了近千行,编译后的空间占用也减少了几十KB。 ![0OC~)5}K~2UQ]91I)I]H()O.png](data/attachment/forum/202205/05/165408wd61jwtlar81ayyk.png "0OC~)5}K~2UQ]91I)I]H()O.png")
总结经验教训,对于这种程序的移植还是要对本身的原理比较清楚,否则遇到稍微复杂一些的就容易发生失败,而且还找不到原因,比较打击自信心。 |

【福利三:雨露均沾·逢7狂欢】之三:AI帮我查BUG
福利三:雨露均沾·逢7狂欢】之二:STM32F407VG串口通信乱码故障的排除
基于STM32F103的I2C主从机通信
OpenBLT移植到STM32F103战舰开发板上适用于所有STM32F103系列的Bootloader
TFT LCD 与 FSMC 的硬件连接大容量 STM32F10xxx FSMC 接口
单片机:初学者该了解的STM32F103基础知识
2025软件工具兔哥知道
STM32之继电器模块
STM32固件库分享,超全系列整理
【MCU实战经验】基于STM32F103的二轮平衡车(6轴上位机 源代...
 微信公众号
微信公众号
 手机版
手机版