.png) STMCU小助手
发布时间:2022-5-11 13:48
STMCU小助手
发布时间:2022-5-11 13:48
|
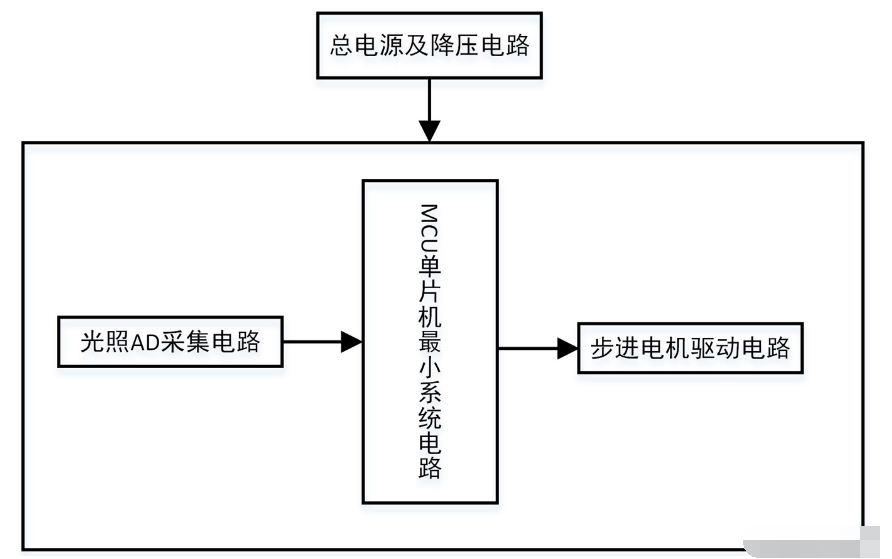
一.硬件方案 本设计采用光电跟踪的方法,利用步进电机驱动,由光电传感器根据入射光线的强弱变化产生反馈信号到微机处理器。微机处理器运行程序,通过对跟踪机构进行控制,调整太阳能电池板的角度实现对太阳的跟踪。 主要由STM32单片机、2路光敏电阻、步进电机控制及电源组成;如图: ![]H2}$P5K7OJZ~0G2A]Z(N%5.png](data/attachment/forum/202205/11/134842cgqbn3gbibws78bi.png "]H2}$P5K7OJZ~0G2A]Z(N%5.png")
二.设计功能 (1)通过2个光敏电阻来检测光照,光敏电阻放在板子的2端,如果两个光敏电阻的阻值相同,则说明阳光正对,如果两个光敏阻值不同 ,则说明阳光没有正对,则,步进电机调整板子正对。 (2)预留一路光敏,属于预留未使用。 三.设计原理图 (1)原理图主要采用AD软件进行设计,如图: %_N_L3~9$LGDOK1QR.png")
(2)PCB图如下: 
四.软件设计 (1)程序流程图 
(2)主程序源码
|
【经验分享】STM32 HAL库移植FreeModbus详细步骤
【逢7发帖赢大礼】STM32开发之IC门禁卡UID读取方法!
实战经验 | Keil工程使用NEAI库的异常问题
经验分享 | FDCAN数据段波特率增加后发送失败的问题分析
STM32几种流行开发环境的优缺点
好用软件推荐-TouchGFX Designer
OpenSTLinux 6.1发布:M33-TD加持+安全升级,STM32MPU开发效率翻倍!
【经验分享】STM32CubeIDE汉化
手把手教你VSCode搭建STM32开发环境
RTOS在STM32中的应用
 微信公众号
微信公众号
 手机版
手机版