.png) STMCU小助手
发布时间:2022-8-30 19:13
STMCU小助手
发布时间:2022-8-30 19:13
|
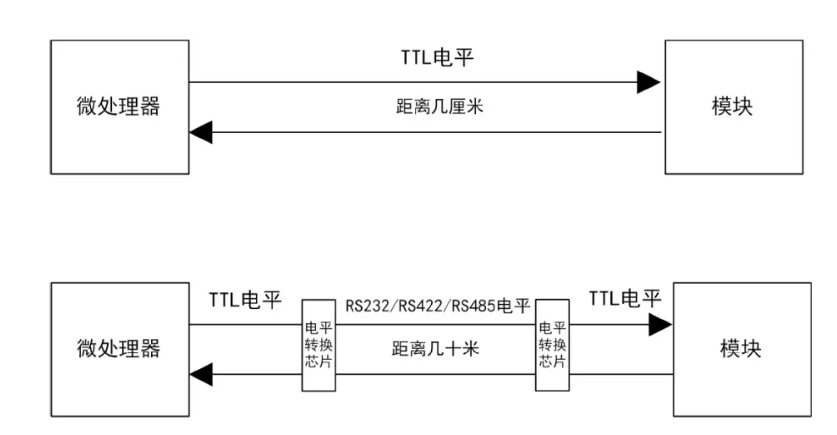
15.1 关于串口 15.1.1 串口理论知识 说到串口,经常提到TTL、RS232、RS422、RS485,简单的说,就是为了适应不同的环境条件,使用了不同的电平标准。假如微处理器和板载的蓝牙透传模块通信时,一般就使用TTL电平,引脚直接连接即可。假如微处理器在工业现场,需要连接一个几十米外的装置,则应该考虑将TTL电平转为RS232、RS422、RS485。 )_Q@N@M.png")
图 15.1.1 不同通信电平应用的场景 如下表 15.1.1 是几个通信接口标准总结。可以发现为了加大传输距离,人们依次尝试了增加电压、差分传输等方式。 ![1@UV5]AMK}AM[NR4F3@LY%I.png](data/attachment/forum/202208/30/191450um2ewi25w2euzjed.png "1@UV5]AMK}AM[NR4F3@LY%I.png")
表 15.1.1 常见通信接口标准 以TTL电平的接口为例讲解串口怎么传输数据,对于RS232/RS422/RS485等接口,仅仅是把TTL电平转换为不同的电平值,或者转换为差分信号。 TTL接口的串口,硬件连接如图 15.1.2 所示。 ![N3O9@]2J})D516_SYV($RSF.png](data/attachment/forum/202208/30/191450n1ho6jcr9s3z7s2k.png "N3O9@]2J})D516_SYV($RSF.png")
图 15.1.2 TTL电平的串口硬件连接示意图 串口传输中的一些概念如下: 波特率:一般选波特率都会有9600,19200,115200等选项。其实意思就是每秒传输这么多个比特位数(bit); 起始位:先发出一个逻辑”0”的信号,表示传输数据的开始; 数据位:可以是5~8位逻辑”0”或”1”,先传输bit 0,再传输bit 1,依次类推; 校验位:数据位加上这一位后,使得“1”的位数应为偶数(偶校验)或奇数(奇校验),以此来校验数据传送的正确性。校验位是可选的,可以不传输; 停止位:它是一个字符数据的结束标志,数据线变回逻辑”1”; 怎么发送一字节数据,比如“A”?“A”的ASCII值是0x41,二进制就是01000001,怎样把这8位数据发送给对方呢? 双方约定好波特率、数据格式(数据位个数、停止位个数、是否使用校验位、奇校验还是偶校验),假设数据位是8,停止位是1,校验位是1; 初始电平为逻辑1; 发送方输出逻辑0,并保持1位的时间;接收方检测到逻辑0,就知道对方准备发送数据了; 发送方根据数据的bit 0设置引脚电平,并保持1位的时间;接收方读取引脚电平,得到bit 0; 发送方根据数据的bit 1设置引脚电平,并保持1位的时间;接收方读取引脚电平,得到bit 1; 以此类推,发出8位数据; l发送方计算出校验值,设置引脚,并保持1位的时间;接收方读取引脚电平,得到校验值;注意,这步可以省略; 发送方输出逻辑1,并保持1位的时间;接收方读取引脚电平,直到数据传输结束; 信号的波形图如图 15.1.3 所示。 SUXG9K{{G.png")
图 15.1.3 串口信号传输波形图 15.1.2 STM32的串口 在嵌入式中,很多MCU和外设模块都集成有UART外设。STM32F103系列最多有3个通用同步异步收发器(Universal synchronous asynchronous receiver transmitter,USART),2个通用异步收发器(Universal asynchronous receiver transmitter,UART)。USART和UART的主要区别在于,USART支持同步通信,该模式有一根时钟线提供时钟。 串口在嵌入式中经常使用,一般使用UART就足够了,常见的用途如下: 1. 作为调试口,打印程序运行的状态信息; 2. 连接串口接口的模块(比如GPS模块),传输数据; 3. 通过电平转换芯片变为RS232/RS485电平,连接工控设备; STM32F103系列不同USART所支持的功能如表 15.1.2 所示,STM32F103C8T6只有USART1/2/3。 ![WA_]89NVGL3ZZF[MYVW}D.png](data/attachment/forum/202208/30/191451nfa8mi1wbiw1amb1.png "WA_]89NVGL3ZZF[MYVW}D.png")
表 15.1.2 STM32F103系列不同USART所支持功能 USART内部结构的结构如图 15.1.4 所示。 ![SLW(WF`F]D8$D$ITP33XVA9.png](data/attachment/forum/202208/30/191451f8udvpexd8v8pdsd.png "SLW(WF`F]D8$D$ITP33XVA9.png")
图 15.1.4 USART内部结构 可以把USART分成四部分: ①:USART引脚 TX:数据发送; RX:数据接收; SW_RX:在单线和智能卡模式下接收数据,属于内部引脚,没有具体外部引脚; RTS:在硬件流控制时,用于指示本设备准备好可接收数据,低电平说明本设备可以接收数据; CTS:在硬件流控制时,用于指示本设备准备好可发送数据,低电平说明本设备可以发送数据; CK:在同步模式时,用于输出时钟; ②:波特率发生器 通过设置USART_BRR寄存器的值,实现串口通信数据传输速率的设置。由《参考手册》可知计算公式为: 
其中“Tx/Rx Baudrate”为波特率,“f_PCLK”为该外设USART的时钟频率,“USARTDIV”为USART_BRR寄存器的值。 假设所需波特率为115200,当前USART时钟为72MHz,则USARTDIV=72000000/(115200*16)=39.0625。USART_BRR寄存器使用高12位[15:4]存放整数部分,低4位[3:0]存放小数部分,小数部分每一位对应1/24=0.0625。因此,整数39对应16进制为0x27,左移4位为0x270,小数0.0625,对应0x1,USART_BRR=0x271即可。 在利用寄存器配置USART的波特率的时候需要依据此公式计算USART_BRR的值,而在HAL库中无需计算,只需传入所需波特率,自动写USART_BRR寄存器值,但是我们仍然要学习这个波特率的计算公式,也许的开发调试过程中会使用到。 前面计算波特率需要知道外设时钟的值,由前面图 6.1.2 可知,USART1挂载APB1上,USART2/3和USART4/5挂载APB2上。由前面图 9.1.1 可知,APB1时钟最大为36MHz,APB2时钟最大为72MHz。因此,只有USART1的波特率计算中的能取最大系统时钟72MHz,而其它的USART/UART只能取36MHz。 ③:发送器/接收器控制单元 通过向控制寄存器CR1、CR2、CR3和状态寄存器SR写入相应的位,可实现对USART数据的发送和接收控制。其中CR1主要用于配置USART的数据位、校验位和中断使能,CR2用于配置USART的停止位和SCLK时钟控制,CR3用于CTS硬件流控制、DMA多缓冲控制等。通过读取状态寄存器SR的值,可查询USART的状态。 ④:数据收发寄存器单元 该部分主要由发送数据寄存器(TDR)、发送移位寄存器、接收数据寄存器(RDR)、接收移位寄存器组成。发送移位寄存和接收移位寄存器,分别负责将发送数据并串转换和接收数据串并转换,从而实现数据在传输时,是一位一位的发送和接收。 15.2 硬件设计 如图 15.2.1 为开发板USB串口部分的原理图,U2是UART转USB的芯片CH340G,可自动将UART信号转换为USB信号,右边是串口自动下载电路,在前面5.2.4 调试/下载电路有过分析,这里不再赘述。 MCU的USART1_TX(PA9)和USART1_RX(PA10)接到U2,U2收到数据后自动将UART信号转换成USB信号。 如图 15.2.2 所示为开发板USB切换电路,拨码开关P2决定开关芯片U4、U5的6脚电平高低。如果6脚为低,开关芯片3脚与4脚接通,即串口的USB信号连接USB口;如果6脚为高,开关芯片1脚与4脚接通,即MCU的USB信号连接USB口,实现了USB口的两种状态。 ![7JWY{{OTAJ]LVVQC2HMMIJD.png](data/attachment/forum/202208/30/191452q7zb17n7p0tfnrxr.png "7JWY{{OTAJ]LVVQC2HMMIJD.png")
图 15.2.1 USB调试串口电路 
图 15.2.2 USB切换电路 15.3 软件设计 15.3.1 软件设计思路 实验目的:本实验使用USART1向电脑发送打印信息。 1) 初始化USART:设置波特率,收发选择,有效数据位等 2) 串口引脚初始化:USART使能、GPIO端口时钟使能、GPIO引脚设置为USART复用; 3) 重定向printf和scanf; 4) 主函数调用USRAT初始化函数,使用printf打印输出,使用scanf获取输入; 本实验配套代码位于“5_程序源码\7_通信—调试串口\”。 15.3.2 软件设计讲解 1) GPIO引脚选择与串口选择 代码段 15.3.1 引脚宏定义(driver_usart.h)
定义使用串口、对应GPIO、时钟使能,方便代码复用。 2) 初始化USART USART初始化包含两部分:协议部分和硬件部分。 协议部分与硬件无关,比如USART的波特率、奇偶校验、停止位等,通过“HAL_UART_Init()”设置。 硬件部分指承载的硬件载体,比如串口所使用的发送、接收引脚的复用,通过“HAL_UART_MspInit()”设置。函数名中的Msp(MCU Specific Package,MCU特定软件包),就是指MCU相关的硬件初始化。 代码段 15.3.2 USART初始化(driver_usart.c)
4行:定义一个“UART_HandleTypeDef”结构体(官方也称句柄)变量husart,用于保存串口参数设置; 15~21行:设置串口参数,也就是husart: Instance:USART寄存器及地址,即哪一个USART; Init.BaudRate:“UART_HandleTypeDef”结构体里“UART_InitTypeDef”结构体成员,该属性为波特率; Init.WordLength:每次发送的字节长度,通常设置为8bit; Init.StopBits:每次发送后停止位长度,通常设置为1bit; Init.Parity:奇偶校验,通常设置为不校验; Init.Mode:收发模式,通常设置为可收可发; Init.HwFlowCtl:流控设置,没有用到(CTS/RTS),通常设置为None; 24行:调用“HAL_UART_Init()”,传入设置的husart,初始化串口; “HAL_UART_Init()”会调用“HAL_UART_MspInit()”,从而实现对涉及的硬件初始化,用户需要覆写(HAL库提供函数名,函数内容需要自己编写)该函数,完成使能串口时钟、初始化TX/RX的引脚、设置USART1的中断优先级且使能中断等。 代码段 15.3.3 USART MSP初始化(driver_usart.c)
11行:定义一个“GPIO_InitTypeDef”结构体变量GPIO_InitStruct,用于保存GPIO参数设置; 12行:当系统中用到多个串口时,都会调用“HAL_USART_MspInit”进行硬件初始化,因此需要判断是否为USARTx(宏定义对应USART1); 15行:使能USART1时钟; 18行:使能USART1_TX(PA9)和USART1_RX(PA10)所在组时钟; 23~26行:设置USART的发送引脚: Pin:指定引脚号; Mode:配置为复用推挽功能; Pull:默认上拉即可; Speed:作为通信信号引脚,设置为High; 27行:使用“HAL_GPIO_Init()”初始化该引脚; 29~31行:设置USART的接收引脚; 3) 重定向打印函数 以上初始化完成后,就可以使用HAL库提供的“HAL_UART_Transmit()”从串口发送数据,使用“HAL_UART_Receive()”接收数据,但这样使用不方便,需要自己处理数据类型。在学习C语言时,通常使用printf将数据格式化打印,比较方便。因此,这里需要重定向打印函数,在使用printf时调用“HAL_UART_Transmit()”打印。 代码段 15.3.4 重定向打印函数(driver_usart.c)
printf和scanf会分别调用“fputc()”和“fgetc()”,因此这里覆写这两个函数,使用HAL提供的函数实现收发数据。 同时,还需要需要点击“ ”,打开工程选项界面,切换到“Target”标签,勾选上“Use MicroLIB”,如图 15.3.1 所示。 ![]_YM_6{13H)747O$W9AIA(C.png](data/attachment/forum/202208/30/191453vgwq47w97njv4579.png "]_YM_6{13H)747O$W9AIA(C.png")
图 15.3.1 勾选“Use MicroLIB” 也可以添加如下代码,就不用勾选“Use MicroLIB”,两个方法二选其一即可。 代码段 15.3.5 可选添加内容(driver_usart.c)
4) 主函数测试
主函数直接使用“printf()”便可调用USART1打印,使用“scanf()”便可调用USART1接收数据。 2行:初始化USART1,设置波特率为常用的115200; 6~7行:中文打印测试;如果编译报错,需要点击“ ”,打开工程选项界面,切换到“C/C++”标签,在“Misc Controls”里加上“"--locale=english"”,如图 15.3.2 所示。 8行:字符打印测试; 9~10行:字符串打印测试; 11~12行:正负整打印疑测试; 13~14行:十六进制打印测试; 15~16行:浮点数打印测试; 21~29行:通过“scanf()”函数获取输入,如果输入的指定内容,则打印指定内容; ![OC2D)]W44]SSJ7V_S%_6AXG.png](data/attachment/forum/202208/30/191454u7gd39ddg7gp0bb0.png "OC2D)]W44]SSJ7V_S%_6AXG.png")
图 15.3.2 指定本地编译环境 15.4 实验效果 本实验对应配套资料的“5_程序源码\7_通信—调试串口\”。首先如图 15.4.1 所示将开发板插入电脑USB口连接,注意拨码开关拨向非ON一端。打开MobaXterm,设置串口会话,如图 15.4.2 所示。 ①点击做上角“Session”,创建会话; ②在中间弹出的窗口,选择“Serial”,即串口; ③下拉选择串口端口,我这里是COM6,读者可能编号不一样,但后面显示的芯片型号是一样的,选择“USB-SERIAL CH340 ”即可; ④波特率选择115200,与主函数中串口初始化设置的波特率保持一致; ⑤以为串口是异步通信,需要双方统一传输规则,这里和代码段 15.3.2 中的设置保持一致。数据位8位,停止位1位,无校验,无流控; ⑥设置完后,点击“OK”; 打开代码工程,使用Keil编译,下载程序,MobaXtrem显示如图 15.4.3 所示界面,所有打印正常显示。在电脑键盘输入“C”或“c”,即可控制串口打印“Hello World”。 ![JJS4UC9~]}PJN`ZWC){6S_E.png](data/attachment/forum/202208/30/191454eznfibwsi2w5iimn.png "JJS4UC9~]}PJN`ZWC){6S_E.png")
图 15.4.1 调试串口连接实物图 ![91Y]{ZS)J{85`}0PXOFZA%G.png](data/attachment/forum/202208/30/191454n4t34n3tgg4oyy3a.png "91Y]{ZS)J{85`}0PXOFZA%G.png")
图 15.4.2 创建串口会话 3.png")
图 15.4.3 串口打印效果 作者:攻城狮子黄 |
【逢7发帖赢大礼】STM32开发之WIFI实时时钟
【逢7发帖赢大礼】STM32开发之指纹识别!
【逢7发帖赢大礼】STM32开发之环境空气质量监测
【逢7发帖赢大礼】STM32开发之人体实时运动信息监测!
【STM32U3 评测】CAN报文接收及过滤
STM32 硬核调试技巧:用 DWT 硬件监控内存读写与函数调用
OpenBLT移植到STM32F103战舰开发板上适用于所有STM32F103系列的Bootloader
巧用 Linker 自定义变量,破解 STM32 Flash 全片自检 ROM 大小配置难题
经验分享 | LAT1471 Flash全片自检过程中巧用Linker自定义变量
STM32 LSE 不起振排查指南:五大核心原因与快速解决方案
 微信公众号
微信公众号
 手机版
手机版