一、SPI 实验----I/O端口配置
在本次 SPI 实验中,STM32芯片做主控,主要使用 SPI1 功能。
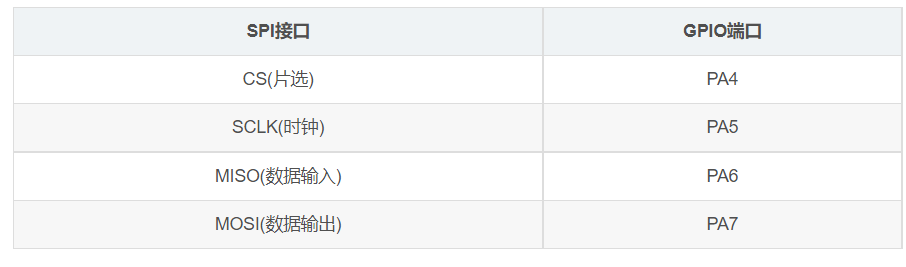
具体引脚配置如下:

具体引脚初始化程序如下:
- /*
- SPI引脚初始化配置
- **PA4------CS
- **PA5------SCLK
- **PA6------MISO
- **PA7------MOSI
- */
- void SPI1_GPIO_Config(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
-
- RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE );//PORTA时钟使能
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5| GPIO_Pin_6|GPIO_Pin_7;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //PA5/6/7复用推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化GPIOA
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //PA4推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化GPIOA
- GPIO_SetBits(GPIOA,GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7); //初始上拉输出
- }
二、SPI 实验----SPI初始化配置
1. SPIC初始化句柄
具体结构体如下:
- typedef struct
- {
- uint16_t SPI_Direction; //设置SPI通信方式:半双工,全双工,串行发送和串行接收。
- uint16_t SPI_Mode; //设置SPI主从模式:主机模式,从机模式。
- uint16_t SPI_DataSize; //设置数据帧结构:8位,16位。
- uint16_t SPI_CPOL; //设置时钟极性CPOL:空闲状态低电平或者高电平。
- uint16_t SPI_CPHA; //设置时钟相位CPHA:第一个或者第二个跳边沿采样。
- uint16_t SPI_NSS; //片选信号由硬件控制还是软件控制。
- uint16_t SPI_BaudRatePrescaler; //设置波特率预分频值:2、4、8、16、32、64、128和256。
- uint16_t SPI_FirstBit; //设置数据传输顺序:MSB高位在前、LSB低位在前。
- uint16_t SPI_CRCPolynomial; //设置CRC校验多项式,提高通信可靠性,大于1即可。
- }SPI_InitTypeDef;
2. SPI初始化配置
具体如下:
- void SPI1_Init(void)
- {
- SPI1_GPIO_Config();//SPI引脚初始化配置
- SPI_InitTypeDef SPI_InitStructure;
-
- RCC_APB2PeriphClockCmd( RCC_APB2Periph_SPI1, ENABLE );//SPI1时钟使能
-
- SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;//SPI设置为双线双向全双工
- SPI_InitStructure.SPI_Mode = SPI_Mode_Master;//SPI设置为主机模式
- SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;//设置SPI为8位帧数据结构
- SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行同步时钟的空闲状态为高电平
- SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;//串行同步时钟的第二个跳变沿(上升或下降)数据被采样
- SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;//片选信号由软件控制
- SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256;//定义波特率预分频的值:波特率预分频值为256
- SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;//指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
- SPI_InitStructure.SPI_CRCPolynomial = 7;//CRC值计算的多项式为7
- SPI_Init(SPI1, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
-
- SPI_Cmd(SPI1, ENABLE); //使能SPI外设
- SPI1_ReadWriteByte(0xFF);//启动传输
- }
三、SPI 实验----SPI 读写操作
具体程序如下:
- /*
- SPI的读写操作
- **TxData:要写入的字节
- **返回值:读取到的字节
- */
- uint8_t SPI1_ReadWriteByte(uint8_t TxData)
- {
- while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET) //检查指定的SPI标志位设置与否:发送缓存空标志位
- {
- //等待发送完成
- }
- SPI_I2S_SendData(SPI1, TxData); //通过外设SPIx发送一个数据
- while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET) //检查指定的SPI标志位设置与否:接受缓存非空标志位
- {
- //等待接收完成
- }
- return SPI_I2S_ReceiveData(SPI1); //返回通过SPIx最近接收的数据
- }
————————————————
版权声明:根号五
|
.png) STMCU小助手
发布时间:2022-9-6 22:54
STMCU小助手
发布时间:2022-9-6 22:54
 微信公众号
微信公众号
 手机版
手机版