.png) STMCU小助手
发布时间:2022-11-10 17:00
STMCU小助手
发布时间:2022-11-10 17:00
|
前言 STM32U5 系列微控制器内嵌两个可选为系统时钟源的内部 RC 振荡器。它们是 HSI16(高速内部)和 MSI(多速内部)振荡器,其可驱动两个独立的输出:MSIS(用于系统时钟)和 MSIK(用于某些外设作为内核时钟)。HSI16 振荡器的典型频率为 16MHz。MSI 振荡器为多速低功耗时钟源。 STM32U5 系列微控制器(称为 STM32U5 器件)具有三个辅助内部时钟源: • LSI:32kHz(内部低速) • HSI48:48MHz(内部高速),可直接用于 USB、RNG(真随机数发生器)和 SDMMC(SD/SDIO MMC 卡主机接口)。 • SHSI:48MHz(+抖动)内部安全 RC 振荡器,专用于为 SAES 外设提供时钟 工作温度对 RC 振荡器的精度有影响。在 30°C 时,HSI16 精度为±0.5%,MSI 精度为±0.6%,HSI48 精度为±4%。但在–40°C 至125°C 的温度范围内,精度会降低。为补偿温度对内部 RC 振荡器精度的影响,STM32U5 器件内置一些功能用于校准 HSI16、 MSI 和 HSI48 振荡器及测量 LSI 振荡器频率。 当系统中有 32.768kHz 的 LSE(低速外部)时钟源可用时,MSI 振荡器的频率可通过硬件自动微调,从而达到优于±0.25%的精度。这种使用 LSE 进行的自动硬件校准被称为 PLL(锁相环)模式。本应用笔记尚未对 PLL 模式进行介绍,仅侧重于用户微调。 本文档还详细介绍了如何校准 HSI16、MSI 和 HSI48 内部 RC 振荡器,方法如下: • 基于找到具有最小误差的频率的方法 • 基于找到最大允许频率误差的方法 • 制定一个预先测量值的表然后在其中搜索相应变化的方法 LSI 振荡器的测量是通过将振荡器连接到定时器输入捕获来实现的。 本应用笔记随附的 X-CUBE-RC-CALIB 扩展包包含执行这些内部振荡器校准的源代码,以及运行示例所需的所有嵌入式软件模块。 1 STM32U5 系统时钟 STM32U5 器件具有下列时钟源可用于驱动系统时钟: • HSI16:16 MHz 高速内部 RC 振荡器时钟 • HSE:4 至 50 MHz 高速外部振荡器时钟 • MSI(MSIS):100 kHz 到 48 MHz 多速内部 RC 振荡器时钟 • PLL:1 MHz 到 160 MHz 锁相环(PLL),由 HSI16、MSI 或 HSE 振荡器提供时钟 HSI16 振荡器的典型频率为 16 MHz,功耗为 150 μA。 MSI RC 振荡器基于四个内部 RC 振荡器:MSIRC0 = 48 MHz、MSIRC1 = 4 MHz、MSIRC2 = 3.072 MHz、MSIRC4 = 400 kHz。每个 MSIRCx 振荡器具有四个分频器:/1、/2、/3 和/4。MSI 共提供了 16 个频率范围,可选 择用于两种输出:MSIS(用于系统时钟)和 MSIK(用于外设内核时钟)。MSI 的设计为工作电流与频率成正比 (请参考产品手册以获得 MSI 功耗与所选频率范围之间关系的更详细信息),当 CPU 在低频运行时,可最小化内 部振荡器功耗。在从复位重启或待机、关断低功耗模式唤醒后,MSIS 时钟被用作系统时钟。从停机模式唤醒后, 可选择 MSI 时钟而不是 HSI16 作为系统时钟。 HSI48 时钟信号由内部 48 MHz RC 振荡器生成,可直接用于 USB、RNG 和 SDMMC。 内部 RC 振荡器(HSI16、MSI 和 HSI48)提供了一个低成本时钟源(无需外部元件)。它们还具有比外部振荡器 更快的启动时间和更低的功耗。可校准 HSI16、MSI 和 HSI48 振荡器以提高其精度。但即使校准后,内部 RC 振荡 器频率精度也不如外部晶振或陶瓷谐振器的频率精度(几十 ppm)高。 注: 若外部振荡器发生故障,则 MSI 内部 RC 振荡器还可作为备份时钟源(辅助时钟)使用。 ![F]ISM5C7[{OWS1]Q@~BW7CB.png](data/attachment/forum/202211/09/174201ubth59j5s8y5hlyz.png "F]ISM5C7[{OWS1]Q@~BW7CB.png")
STM32U5 器件还嵌入了以下次级时钟源(不能用作系统时钟): • LSI:32kHz 低速内部 RC,可在停机和待机模式下保持运行用于 IDWG(独立看门狗)、RTC 和 LCD。LSI振荡器无法校准,但可通过测量来评估任何频率偏差(由于温度和电压变化)。 • LSE 晶振:32.768 kHz 低速外部晶振 RC,可选地驱动 RTC(实时时钟) • HSI48:48 MHz 高速内部 RC,设计用于通过特制 CRS(时钟恢复系统)电路为 USB 外设提供高精度时钟。它还可驱动 RNG 和 SDMMC。 • MSIK:多速内部 RC 振荡器时钟,用于外设内核时钟(源自 MSIRCx 振荡器) • SHSI:48 MHz 内部 RC 振荡器,专为 SAES 外设提供时钟 2 内部 RC 振荡器校准 由于生产过程的不同,每个器件的内部 RC 振荡器的频率都可能不同。因此,MSI 和 HSI16 RC 振荡器由意法半导体在 TA = 30 °C 时进行工厂校准。复位后,工厂校准值自动加载到内部校准位中。 可微调内部 RC 振荡器的频率,以在更宽的温度和供电范围内达到更好的精度。这就是微调位的作用。 对于 HSI16 振荡器,复位后校准值加载于 HSICAL[11:0]中。使用五个微调位 HSITRIM[4:0]进行微调。默认微调值为 16。增加/降低此微调值会增加/降低 HSI16 频率。HSI16 振荡器微调步长为 0.18%(约 29 kHz),具体如下: • 将微调值写为 17 至 31 会增加 HSI16 频率。 • 将微调值写为 0 至 15 会降低 HSI16 频率。 • 将微调值写为 16,HSI16 频率会保持为默认值。 下图显示了随校准值变化的 HSI16 振荡器行为。HSI16 振荡器频率随校准值增加(校准值 = 默认的 HSICAL[11:0]+ HSITRIM[4:0])。 ![TC[XX_{WYY~K9N19CEP6]IG.png](data/attachment/forum/202211/09/174201q090nzddgngq99uu.png "TC[XX_{WYY~K9N19CEP6]IG.png")
对于 MSIRCx 振荡器(x = 0..3),复位后校准值加载于 MSICALx[4:0]位中。五个微调位 MSITRIM[4:0]使微调范围更宽。校准基于将默认的 MSICALx[4:0](复位值)加上 MSITRIMx[4:0]。 结果存储在 MSICALx[4:0] = 默认 MSICALx[4:0] + MSITRIMx[4:0]中。 示例 假设默认的 MSI 校准值 MSICALx[4:0]为 0x10: 1. 将 0x01 和 0x0F 之间的值写入 MSITRIM[4:0],会使校准值 MSICALx[4:0]处于 MSICALx[4:0] = 0x10 + 0x01= 0x11 到 MSICALx[4:0] = 0x10 + 0x0F = 0x1F 的范围内。 这些结果大于 0x10(默认的 MSICALx[4:0]值),因此 MSIRCx 频率增加 1 步(0x11 - 0x10)至 15 步(0x1F - 0x10)。 2. 将 0x11 和 0x1F 之间的值写入 MSITRIM[4:0],会使校准值 MSICALx[4:0]处于 MSICALx[4:0] = 0x10 + 0x11 =0x01 到 MSICALx[4:0] = 0x10 + 0x1F = 0x0F 的范围内。这些结果小于 0x10(默认的 MSICALx[4:0]值),因此 MSIRCx 频率降低 1 步(0x01)至 15 步(0x0F)。 3. 在 MSITRIM[4:0]中写入默认校准值 0x10 会导致校准值 MSICALx[4:0]等于MSICALx[4:0] = 0x10 + 0x10 = 0x00,因此 MSIRCx 频率会降低 16 步(最低频率)。 下图显示了 MSIRCx 相比于 MSICALx[4:0]在 4MHz 时的行为。 [13~YLN.png")
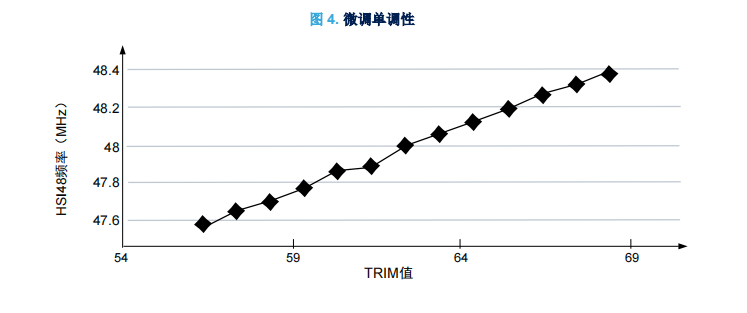
对于 HSI48 振荡器,复位后校准值加载于 HSI48CAL[8:0]中。使用六个微调位 TRIM[6:0](在 CRS_CR 寄存器中)进行微调。默认微调值为 64。增加/降低此微调值会增加/降低 HSI48 频率。 HSI48 振荡器微调步长为 0.12%(约 57 kHz),具体如下: • 将微调值写为 65 至 127 会增加 HSI48 频率。 • 将微调值写为 0 至 63 会降低 HSI48 频率。 • 将微调值写为 64,HSI48 频率会保持为默认值。 下图显示了随校准值变化的 HSI48 振荡器行为。HSI48 振荡器频率随校准值增加(校准值 = 默认的 HSI48CAL[8:0] + TRIM[6:0])。 ![)ZTP]JEC_~1VF7W{KZ1YL.png](data/attachment/forum/202211/09/174200qq0bz93sx9qqsods.png ")ZTP]JEC_~1VF7W{KZ1YL.png")
2.1 校准原理 校准原理包括以下步骤: 1. 将(需要校准的)内部 RC 振荡器设置为系统时钟。 2. 测量每个微调值的内部 RC 振荡器(HSI16 或 MSIRCx)频率。 3. 计算每个微调值的频率误差。 4. 将微调位设置为最优值(对应于最低频率误差)。 内部振荡器频率并非直接测量,而是使用定时器计算时钟脉冲个数,与典型值比较。为此,必须有一个非常精确的参考频率,比如由外部 32.768 kHz 晶振或 50 Hz/60 Hz 电源频率(请参考第 2.2.2 节 用例 2:其他源用作参考频率)。 下图显示了怎样使用定时器计数个数测量参考信号周期。 
启用定时器计数后,当第一个参考信号上升沿发生时,捕捉定时器计数值,储存于 IC1ReadValue1 中。在第二个上升沿,又捕捉到定时器计数,储存于 IC1ReadValue2 中。在两个连续上升沿之间的时间(IC1ReadValue2 -IC1ReadValue1)表示了参考信号的整个周期。 因为定时器计数器的时钟由系统时钟提供(HSI16 或 MSIRCx),因此与参考信号有关的内部 RC 振荡器生成的真正频率为: 测量频率 = (IC1ReadValue2 – IC1ReadValue1) × REFERENCE_FREQUENCY 误差(单位 Hz)为测量频率与典型值之差的绝对值。 因此,内部振荡器频率误差表示为: 频率误差(Hz) = 测量频率 - 系统时钟频率 稳定时间和频率过冲/下冲 写入微调值后,振荡器频率从原始频率变为最终频率。这种频率变化需要一定的时间才能稳定到新的频率值。 HSI16、HSI48 和 MSI 振荡器的稳定时间约为 15 μs(设置最终频率的时间)。 在稳定时间内,频率值可以高于(当新的频率值大于原来的频率值时)或低于(当新的频率值小于原来的频率值时)最终频率。该过冲/下冲值取决于应用于微调值的微调步长大小。最坏情况下的过冲变化(整个范围内的微调变化)约为 2.5%。中等变化约为 1.5%。 校准过程须在微调值变化和振荡器频率读取之间实施等待时间。 对每个微调值计算误差之后,算法会决定最优微调值(对应于最接近典型值的频率),编程于微调位中(请参考第 2.3 节 )。 完整版请查看:附件 |

zh.DM00794778.pdf
下载670.05 KB, 下载次数: 11
STM32U5 Timer+GPDMA 2D 通道实现多波形交替输出 实操方案与优化
安全篇:STM32L5/U5—— 高性能 + 高安全超低功耗 MCU
经验分享 | STM32U5 ADC+TIM+DMA 2D传输应用演示
【经验分享】LAT1496 基于 USBD库CDC Standalone例程中的一个Bug解析
STM32U5A9JDK试用---MIPI-DSI屏幕驱动
STM32U5 ADC 自校准失败终极解决:VDDA 隔离解除 + 电压调整器就绪实操指南
《STM32U3线上课程》学习笔记+STM32U3 超低功耗 MCU,超低功耗及数据安全
立即在GitHub上抢先体验面向STM32U5的最新STM32Cube HAL更新
STM32开发五大误区,新手别傻傻信了
实战经验 | STM32U5周期性异常复位问题分析
 微信公众号
微信公众号
 手机版
手机版