.png) STMCU小助手
发布时间:2022-12-5 21:00
STMCU小助手
发布时间:2022-12-5 21:00
|
前言本应用笔记讲解了当使用基于 cortex-M3 微控制器的 medium-density STM32F103xx 系列产品驱动双极步进电机时,怎样做到体积小、速度高、成本低、资源少。它提供一种简单的方法,实现全步进和半步进工作模式控制步进电机。 步进电机是一种机电设备,可将电脉冲转换为离散的机械步进运动。当以适当顺序施加电命令脉冲时,步进电机的轴将以离散步进旋转。当需要受控的运动时,步进电机是一个很好的选择。尤其是当应用需要控制旋转角、速度、位置和同步时,它们非常有用。 步进电机的主要优势在于它们不需要反馈器件;与其它运动控制系统相比,它们很便宜;它们有极佳的低速扭矩且很稳定。很多步进电机应用都得益于 STM32F10xxx 器件的功耗、特性及灵活性。包括机器人控制器、车床工具、摄影机及其它精确的轴位置控制环境。 此外,STM32F10xxx 微控制器的高性能为设计者们提供了仅需控制器的很低计算资源,就可以稳定控制步进电机。 本应用笔记给出了一个简单的方法来实现按照典型运行曲线运行 (先加速,再匀速,最后减速)的步进电机控制。用户可选择工作模式 (全步进或半步进)、电机的旋转方向 (顺时针或逆时针)、控制电流模式(快衰减或慢衰减)。此方法使用 medium-density STM32F103xx及 L6208 全集成两相步进电机驱动。此方法价格最低、实现最简单、使用的 CPU 负荷最小。 1 步进电机基础 1.1 步进电机类型 有三种基本的步进电机类型: ● 可变磁阻 ● 永磁 ● 混合 可变磁阻 (VR)电机类型已经存在了很长时间。从构造角度,它可能是最容易理解的。此类电机包含一个软铁多齿转子和一个绕线定子。当向定子绕组输入 DC 电流时,定子励磁为磁极,当转子的齿被吸到通电的定子磁极时,会发生旋转。 永磁(PM)电机类型向电机结构增加了永磁体。转子不像 VR 电机中那样有齿,而是磁化为交替的北极和南极,两极位置在与转子轴平行的直线上。这些磁化转子极提供了增强的磁通量密度,与 VR 类型相比,它为 PM 电机带来了更好的扭矩特性。 混合(HB)电机类型在步进分辨率、扭矩和速度方面有更好的性能。此类电机融合了 PM 和VR 步进电机这两种类型的最佳特性。与在 VR 电机中一样,转子是多齿的,在其转轴周围包含轴向磁化的同心磁。转子上的齿提供了更好的路径,有助于将磁通引导至气隙中的所需位置。与 VR 和 PM 电机类型相比,此特性增加了电机的制动、保持和动态磁通特性。 步进电机可为双极或单极绕组。 单极步进电机有两个相同的线圈,它们不做电连接,都有中心抽头。双线无感线圈组的任一端通电,共用中心抽头,则磁通反转。单极步进电机的优势在于它们仅需要一个切换开关。然而,它们需要双线无感线圈组,这意味着对于一个给定的体积因子,线更细,电阻更高。 除了线圈没有中心抽头外,双极步进电机与单极电机相同。对于双极电机,可使用 H 桥反转绕组的极性及通。双极步进电机的优势在于它们仅使用一个线圈,因此具有较好的体积因子 (较低的线圈电阻)。 单极电机仍被广泛使用,因为当与分立器件一起实现时,它们的驱动电路更简单。然而,对于现今的集成电路,驱动双极电机所需的元件也不比单极电机多。 ![4TL]{H~(@UUN6RA3X}0TY5Q.png](data/attachment/forum/202212/03/222310rucxcutq8t3zex35.png "4TL]{H~(@UUN6RA3X}0TY5Q.png")
1.2 驱动信号 当供电时,直流电机可自行运行,而步进电机需要换向信号。 可使用不同模式驱动步进电机,包括全步进和半步进模式。通常全步进模式被全步进电机驱动使用。在此模式中,两个相位都一直被供电,电机具有全额定扭矩。此控制模式仅需四个矩形信号,也可由 PWM 生成 (在一步的时间内有固定的占空比)。取决于超前相位,电机轴会顺时针或逆时针旋转。 半步进模式更复杂一些。若使用了半步进驱动,则在每个时钟沿后,电机会前进半步,这样能得到更高的位置分辨率及降低不稳定性。 然而,在两种模式中,信号都以确定的方式互相相关,因此可用标准逻辑生成。较好的逻辑实现最好使用专业应用集成电路,当然芯片价格也很高。简单讲,专业应用集成电路包含内部转换电路,由步长和方向输入控制。 IC (集成电路)电机控制器仅有三种工作模式:全步进两相开、半步进、波形驱动。此类 IC 需要输入四个信号至控制器,它们由微电脑或其它专用控制芯片提供。此外,此解决方案需要一个功率驱动电路和一个微处理器,来产生不同电机的驱动控制信号。 一些已知应用需要能改变步进电机速度,以生成确定的速度曲线 (例如,一个典型的运行曲线)。在此情况下,在这三种可能的模式中,驱动步进电机的最好方式为软件解决方案,使用能代替任何其它控制器的微控制器电路。在基于微控制器的应用中,可使用软件和 PWM 定时器,因此不需要外部控制器。 使用此方法可用最少的硬件及非常低的微控制器 CPU 负荷实现高速应用。 2 使用中密度 STM32F103xx 驱动双极步进电机 本章说明了如何根据图 2 中所示的典型运行曲线,使用 medium-density STM32F103xx 来驱动全步进和半步进模式的步进电机。 
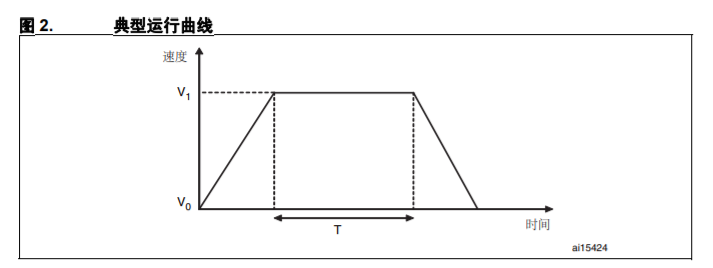
图 2. 典型运行曲线 根据图 2,步进电机从速度 V0 加速至速度 V1 ,在此速度保持时间 T。之后,电机减速至初始速度 V0。速度曲线在加速和减速期间的斜率相同。 完整版请查看:附件 |

使用中密度 STM32F103xx 微控制器驱动双极步进电机.pdf
下载618.5 KB, 下载次数: 0
【福利三:雨露均沾·逢7狂欢】之三:AI帮我查BUG
福利三:雨露均沾·逢7狂欢】之二:STM32F407VG串口通信乱码故障的排除
基于STM32F103的I2C主从机通信
OpenBLT移植到STM32F103战舰开发板上适用于所有STM32F103系列的Bootloader
TFT LCD 与 FSMC 的硬件连接大容量 STM32F10xxx FSMC 接口
单片机:初学者该了解的STM32F103基础知识
2025软件工具兔哥知道
STM32之继电器模块
STM32固件库分享,超全系列整理
【MCU实战经验】基于STM32F103的二轮平衡车(6轴上位机 源代...
 微信公众号
微信公众号
 手机版
手机版