本系列为ARM开发的进阶知识,讲解与ARM芯片进行通信的大部分高级外设的原理及使用方法,不局限于ARM芯片内部,实操性较强且晦涩,需要一定的读者具备一定代码阅读和理解能力。
1.两条总线线路:一条串行数据SDA,一条串行时钟线SCL(主从设备使用同一时钟,属于同步通信)来完成数据的传输及外围器件的扩展 2.I2C总线上的每一个设备都可以作为主设备或者从设备,而且每一个设备都会对应一个唯一的地址,通常是7位,有时候是10位 3.I2C总线数据传输速率在标准模式下可达100kbit/s,快速模式下可达400kbit/s,高速模式下可达3.4Mbit/s。在开发配置的时候,最好检查从设备的传输速率从而对主设备(一般是MCU)进行相应的配置。一般通过I2C总线接口可编程时钟来实现传输速率的调整,同时也跟所接的上拉电阻的阻值有关。 4.I2C总线上的主设备与从设备之间以字节(8位)为单位进行单双工的数据传输。
I2C 总线在物理连接上分别由SDA(串行数据线)和SCL(串行时钟线)及上拉电阻组成,SCL由主机发出,SCL越快,通讯速率越快。通信原理是通过对SCL和SDA线高低电平时序的控制来产生I2C总线协议所需要的信号进行数据的传递。在总线空闲状态时,这两根线一般被上面所接的上拉电阻拉高,保持着高电平。 
1.I2C协议规定: 总线上数据的传输必须以一个起始信号作为开始条件,以一个结束信号作为传输的停止条件。起始和结束信号总是由主设备产生。 2.空闲状态:SCL和SDA都保持着高电平。 3.起始信号: 当SCL为高电平而SDA由高到低的跳变,表示产生一个起始条件,所有的从设备都能感受到这个跳变,做好准备等待被选择。 4.结束信号:当SCL为高而SDA由低到高的跳变,表示产生一个 停止条件 
5.数据传输:数据传输以字节为单位 , 主设备在SCL线上产生每个时钟脉冲的过程中将在SDA线上传输一个数据位,数据在时钟的高电平被采样这时候采集到是1就是1,是0就是0,所以在传输数据时,当时钟处于高电平时一定要保持稳定,时钟处于低电平时可以变换数据。(高电平采样,低电平变换)一个字节按数据位从高位到低位的顺序进行传输。主设备在传输有效数据之前 要先指定从设备的地址,一般为7位,然后再发生数据传输的方向位, 0表示主设备向从设备写数据,1表示主设备向从设备读数据。主从设备以字节为单位(8位)进行数据传输,开始传输数据时把从设备地址加上方向位组成一个8位的字节进行发送并接收一个应答。 6.应答信号:接收数据的器件在接收到 8bit 数据后,向发送数据的器件发出低电平的应答信号,表示已收到数据。这个信号可以是主控器件发出,也可以是从动器件发出。总之,由接收数据的器件发出。 
a.主设备向从设备写数据: 
b.主设备读从设备的数据: 
c.主设备读从设备的某个寄存器:读设备的寄存器首先应该对该设备发送写命令,很多设备都可以看成是一段内存,所以写命令写给从设备,指明要读取哪个地址(寄存器)的数据,接下来才是真正的读数据。不同的从设备是由区别的,在驱动I2C从设备时应当查明设备的时序图,又怎样的要求,不同的时序对应了不同的命令。 
软件模拟I2C时序:由于直接控制 GPIO 引脚电平产生通讯时序时,需要由 CPU 控制每个时刻的引脚状态,所以称之为“软件模拟协议”方式。我们知道,驱动I2C设备只需要两根管脚,即使单片机上没有I2C控制器,根据协议控制每根管脚每一时刻的电平状态,一根模拟数据线,一根模拟时钟线,就可以驱动从设备,相对而言效率低,但是可以实现控制驱动。STM32内部具备专门的I2C控制器,使用时只需对其进行相应的配置即可。 硬件控制产生I2C时序:STM32 的 I2C 片上外设专门负责实现 I2C 通讯协议,只要配置好该外设,它就会自动根据协议要求产生通讯信号,收发数据并缓存起来,CPU只要检测该外设的状态和访问数据寄存器,就能完成数据收发。这种由硬件外设处理I2C协议的方式减轻了 CPU 的工作,且使软件设计更加简单。 控制器功能:配置主从模式(一般都把STM32当作主机使用,作为从机时应当对其赋一个地址),通过配置其内部的寄存器产生一些中断和错误信号,配置通信速率位标准模式、快速模式、超快速模式等 STM32芯片有3组I2C外设,可以同时进行3组I2C传输。它们的I2C通讯信号引出到不同的GPIO引脚上,使用时必须配置到这些指定的引脚。 
一个典型的I2C接口的从设备,专门用于存储数据的芯片。EEPROM (Electrically ErasableProgrammable read only memory),带电可擦可编程只读存储器,一种掉电后数据不丢失的存储芯片。EEPROM可以在电脑上或专用设备上擦除已有信息,重新编程。 EEPROM常用来存储一些配置信息,以便系统重新上电的时候加载之,容量不会很高。EEPOM 芯片最常用的通讯方式就是I2C协议。XX表示容量,常用值为01、02、04、16、32、64等,单位Kbit。一般的存储芯片都具有写保护功能,对WP管脚加一个高电平就开启了写保护功能,就无法往芯片内写数据了。在开发中通常将该管脚接地,确保能够写数据 典型24CXX芯片引脚如下: 
例:24C65的设备地址为7位,高4位恒定为1010,低3位取决于A0-A2的电平状态,般主机在读写24CXX都是把设备地址连同读写位组合成一个字节一起发送。 
24C65的电气连线如下,根据电气连线可知,A0-A2均接地,因此读地址为1010 0001,即0xA1;写地址为10100000,即0xA0 ,且WP接地,用户随时可向芯片内部写入数据。 
24C65写时序:首先发送一个起始信号,接着发送从设备地址以及方向位,收到应答后,向从设备发送要写的存储区域的首地址,24C65的存储地址是16位,先发送高8位,收到应答后再发送低8位,再次收到应答后开始写数据。64Kbit大小位8K字节,需要13位即可表示,所以高3位固定定为0,如下图。 这里是BYTE WRITE,一次写一个字节,此芯片还支持PAGE WRITE,一次写一页,也就是8个字节,如果想写更多,可设置一个for循环实现。 
24C65 读时序与写时序基本相同,只不过在读之前要发送再发送重复开始位进行读操作。 
由电气原理图可知SCL和SDA分别接入了PB6和PB7管脚,读地址为1010 0001,即0xA1;写地址为10100000,即0xA0 步骤: 1.配置RCC 2.配置PB6和PB7管脚 
3.配置I2C协议参数 
4.编写代码
SPI接口是Motorola 首先提出的全双工三线同步串行外围接口,采用主从模式(Master Slave)架构;支持多slave模式应用,一般仅支持单Master。时钟由Master控制,在时钟移位脉冲下,数据按位传输,是高位在前还是低位在前是可以配置的,配置时根据从设备的通信进行相应配置,一般是高位在前,低位在后(MSB first)。SPI接口有2根单向数据线,为全双工通信,目前应用中的数据速率可达几Mbps的水平。 SPI总线被广泛地使用在FLASH、ADC、LCD等设备与MCU间,要求通讯速率较高的场合。 
SPI接口共有4根信号线,分别是:设备选择线、时钟线、串行输出数据线、串行输入数据线。 
(1)MOSI:主器件数据输出,从器件数据输入,连接从机的MOSI,与串口不同,串口需要反着连接(Rx-----Tx) (2)MISO:主器件数据输入,从器件数据输出,连接从机的MISO (3)SCLK :时钟信号,由主器件产生 (4)/SS:从器件使能信号,由主器件控制(片选),一般情况下为地电平选中设备,高电平释放设备。
1.数据交换逻辑:主机和从机都包含一个串行移位寄存器,主机通过向它的SPI串行寄存器写入一个字节发起一次传输。寄存器通过MOSI信号线将字节传送给从机,从机也将自己的移位寄存器中的内容通过MISO信号线返回给主机。这样两个移位寄存器中的内容就被交换了。从机的写操作和读操作时同步完成的,因此SPI成为一个很有效的协议。 如果主机只想写不想读,只需把数据放在数据寄存器,SPI控制器会自动传给外设,同时忽略掉外设传过来的数据即可;如果主机只想读不想写,主机写给外设一个空字符或者随便写一个数据,外设就会把数据传过来,不管是只读还是只写,主机与外设的读和写都h会发生且同时进行。 
2.起始信号: NSS信号线由高变低,是SPI通讯的起始信号。 3.结束信号:NSS信号由低变高,是SPI通讯的停止信号。 4.数据传输:SPI使用MOSI及MISO信号线来传输数据,使用SCK信号线进行数据同步。MOSI及MISO数据线在SCK的每个时钟周期传输一位数据,按位传输,且数据输入输出是同时进行的。SPI每次数据传输可以 8 位或 16 位为单位,每次传输的单位数不受限制,要么是8位,要么是16位,可以配置。 
在SPI操作中,最重要的两项设置就是时钟极性(CPOL)和时钟相位(CPHA)这两项即是主从设备间数据采样的约定方式。由CPOL及CPHA的不同状态,SPI分成了四种模式,主机与从机需要工作在相同的模式下才可以正常通讯,因此通常主机要按照从机支持的模式去设置。同样在配置时一定要弄明白从机支持什么通信模式进行相应的配置。 
1.时钟极性CPOL : 设置时钟空闲时的电平: a.当CPOL= 0 ,SCK引脚在空闲状态保持低电平; b.当CPOL= 1 ,SCK引脚在空闲状态保持高电平。 2.时钟相位CPHA :设置数据采样时的时钟沿: a.当 CPHA=0时,MOSI或 MISO 数据线上的信号将会在 SCK时钟线的奇数边沿被采样 b.当 CPHA=1时, MOSI或 MISO 数据线上的信号将会在 SCK时钟线的偶数边沿被采样 


1.通讯引脚: STM32F4芯片最多支持6个SPI外设控制器,它们的SPI通讯信号引出到不同的GPIO引脚上,使用时必须配置到这些指定的引脚,以《STM32F4xx规格书》为准。f407只有SPI1、SPI2、SPI3。 
其中SPI1、SPI4、SPI5、SPI6是APB2上的设备,最高通信速率达42Mbtis/s,SPI2、SPI3是APB1上的设备,最高通信速率为21Mbits/s。其它功能上没有差异。 2.时钟控制逻辑: SCK线的时钟信号,由波特率发生器根据“控制寄存器CR1”中的BR[0:2]位控制,该位是对f pclk 时钟的分频因子,对f pclk 的分频结果就是SCK引脚的输出时钟频率。 
其中的fpclk 频率是指SPI所在的APB总线频率,APB1为fpclk1 ,APB2为fpckl2 3.数据控制逻辑: STM32F4的MOSI及MISO都连接到数据移位寄存器上,数据移位寄存器的数据来源来源于接收缓冲区及发送缓冲区。 a.通过写SPI的“数据寄存器DR”把数据填充到发送缓冲区中。 b.通过读“数据寄存器DR”,可以获取接收缓冲区中的内容。 c.其中数据帧长度可以通过“控制寄存器CR1”的“DFF位”配置成8位及16位模式;配置“LSBFIRST位”可选择MSB先行(高位在前)还是LSB先行(低位在前)。 4.整体控制逻辑: a.整体控制逻辑负责协调整个SPI外设,控制逻辑的工作模式根据“控制寄存器(CR1/CR2)”的参数而改变,基本的控制参数包括前面提到的SPI模式、波特率、LSB先行、主从模式、单双向模式(同时发送和接收、只发送关掉接收、只接收关掉发送)等等。 b.在外设工作时,控制逻辑会根据外设的工作状态修改“状态寄存器(SR)”,只要读取状态寄存器相关的寄存器位,就可以了解SPI的工作状态了。除此之外,控制逻辑还根据要求,负责控制产生SPI中断信号、DMA请求及控制NSS信号线。 c.实际应用中,一般不使用STM32 SPI外设的标准NSS信号线,而是更简单地使用普通的GPIO,软件控制它的电平输出,从而产生通讯起始和停止信号。
FLSAH 存储器又称闪存,它与EEPROM都是掉电后数据不丢失的存储器,但FLASH存储器容量普遍大于 EEPROM,现在基本取代了它的地位。我们生活中常用的 U盘、SD卡、SSD 固态硬盘以及我们 STM32 芯片内部用于存储程序的设备,都是 FLASH 类型的存储器。在存储控制上,最主要的区别是FLASH 芯片只能一大片一大片地擦写,而EEPROM可以单个字节擦写。 W25X16有8192个可编程页,每页256字节。用“页编程指令”每次就可以编程256个字节。用扇区擦除指令每次可以擦除16页,即一个扇区包含16页,用块擦除指令每次可以擦除256页,用整片擦除指令即可以擦除整个芯片。W25X16有512个可擦除扇区或32个可擦除块。 
1.W25X16的硬件连线如下: 
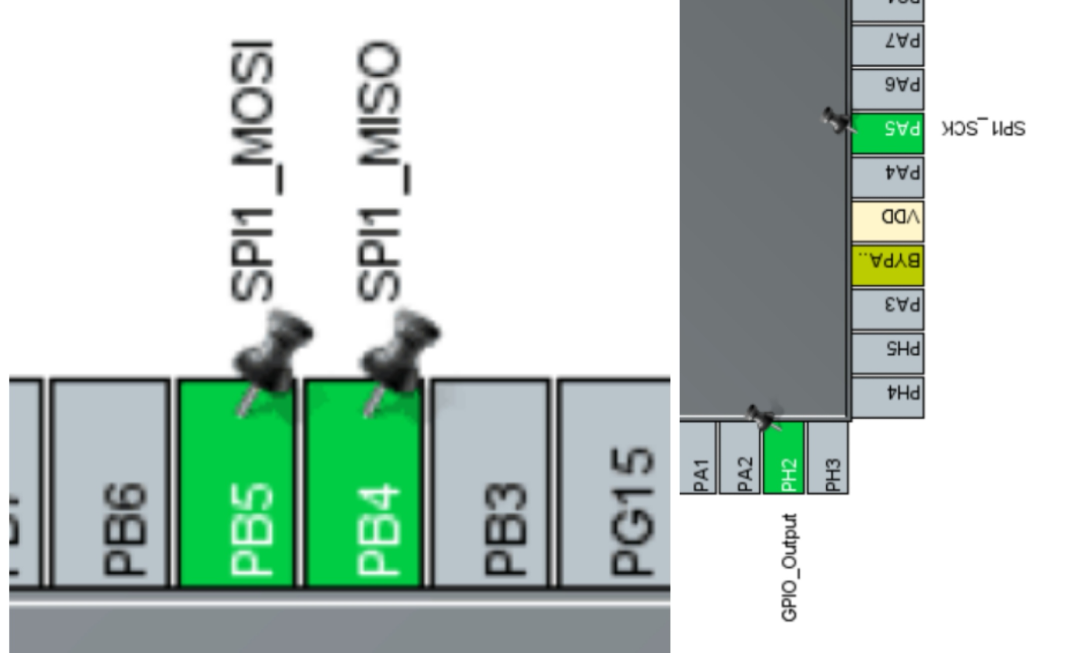
CS: 片选引脚,低电平有效,连接到STM32-PH2管脚 SO: 连接到STM32-PB4管脚(MISO) SI: 连接到STM32-PB5管脚(MOSI) CLK: 连接到STM32-PA5管脚(CLK) WP: 写保护管脚,低电平有效,有效时禁止写入数据。接电源未使用 HOLD: HOLD 引脚可用于暂停通讯,该引脚为低电平时,通讯暂停,未使用 2.W25X16控制指令: 我们需要了解如何对FLASH芯片进行读写。FLASH 芯片自定义了很多指令,我们通过控制 STM32利用 SPI总线向 FLASH 芯片发送指令,FLASH芯片收到后就会执行相应的操作。 而这些指令,对主机端(STM32)来说,只是它遵守最基本的 SPI通讯协议发送出的数据,但在设备端(FLASH 芯片)把这些数据解释成不同的意义,所以才成为指令。 
a.读制造商/设备ID(90):该指令通常在调试程序的时候用到,判断SPI通信是否正常。该指令通过主器件拉低/CS片选使能器件开始传输,首先通过DI线传输“90H”指令,接着传输000000H的24位地址(A23-A0),之后从器件会通过DO线返回制造商ID(EFH)和设备ID。(注:SPI为数据交换通信,主器件在发送“90H”指令时也会接收到一个字节FFH,但此数据为无效数据) 
b.写使能命令(06H):在向 FLASH 芯片存储矩阵写入数据前,首先要使能写操作,通过“Write Enable”命令即可写使能。 
c.扇区擦除(20H):由于 FLASH 存储器的特性决定了它只能把原来为“1”的数据位改写成“0”,而原来为“0”的数据位不能直接改写为“1”。所以这里涉及到数据“擦除”的概念。 在写入前,必须要对目标存储矩阵进行擦除操作,把矩阵中的数据位擦除为“1”,在数据写入的时候,如果要存储数据“1”,那就不修改存储矩阵 ,在要存储数据“0”时,才更改该位。 

d.读状态寄存器(05H):FLASH 芯片向内部存储矩阵写入数据需要消耗一定的时间,并不是在总线通讯结束的一瞬间完成的,所以在写操作后需要确认FLASH芯片“空闲”。我们只需要读取FLASH芯片内部的状态寄存器SRP的S0即可(当这个位为“1”时,表明 FLASH芯片处于忙碌状态,它可能正在对内部的存储矩阵进行“擦除”或“数据写入”的操作) 

e.读数据(03H):读数据指令可从存储器依次一个或多个数据字节,该指令通过主器件拉低/CS电平使能设备开始传输,然后传输“03H”指令,接着通过DI管脚传输24位芯片存储地址,从器件接到地址后,寻址存储器中的数据通过DO引脚输出。每传输一个字节地址自动递增,所以只要时钟继续传输,可以不断读取存储器中的数据。 
f.写数据——页编程(02H):页编程指令可以在已擦除的存储单元中写入256个字节。该指令先拉低/CS引脚电平,接着传输“02H”指令和24位地址。后面接着传输至少一个数据字节,最多256字节。 注:当数据写到一个新的扇区的时候,需要重新发起一个页编程信号才能继续写入数据。 
根据如下的硬件连线图进行配置 
步骤: 1.使能时钟RCC 2.使能SPI1,配置相应管脚 

3.配置SPI协议 
4.编码
1.无法突破页限制,超过一页需要重新发起页编程信号。另外如果要写的数据大于剩余一页剩余的容量,那么超出的数据会写到当前页起始地址出。例如,初始输入的写地址为200,而要写的数据大小为100,那么要写的前56个字节会从地址200开始依次写入,剩下的44个字节会从当前页的0地址开始依次写入,这很有可能覆盖之前的数据。 2.无法突破扇区的限制,当数据写到一个新的扇区的时候,需要重新发起一个页编程信号才能继续写入数据。 转载自: 骆驼听海 如有侵权请联系删除 |
基于stm32平台上的IC-MU磁绝对值编码器SPI通讯和码盘数据处理
使用STM32 MCU和MPU连接PDM数字麦克风
分享STM32资料-采用 STM32U031R8 MCU 的 STM32 Nucleo-64 开发板,官方资料,数据手册等资料
HRTIM 指南
使用 STM32 的 DWT 单元监控内存
DAC,COMP,HRTIM Fault 功能的使用
一个软件引起的 LSE 驱动不良的问题
STM32 GUI LTDC 最大像素时钟评估方法
STM32 Cordic 运算速度评估
全新OpenSTLinux 6.1版本发布
 微信公众号
微信公众号
 手机版
手机版