.png) STMCU小助手
发布时间:2023-4-22 12:03
STMCU小助手
发布时间:2023-4-22 12:03
|
前言 MotionFX 是 X-CUBE-MEMS1 软件的中间件库组件,可在 STM32 上运行。它可提供实时运动传感器数据融合。它还执行陀螺仪偏差和磁力计硬铁校准。 该算法以静态库格式提供,旨在用于基于 ARM® Cortex®-M4 架构的 STM32 微控制器。 它以 STM32Cube 软件技术为基础而构建,便于在不同 STM32 微控制器之间移植。 该 软 件 附 带 了 NUCLEO-F401RE 或 NUCLEO-L476RG 开 发 板 上 的 X-NUCLEO-IKS01A1 ( 可 选STEVAL-MKI160V1)或 X-NUCLEO-IKS01A2 扩展板上运行的示例实现。 1 缩写和缩略语 
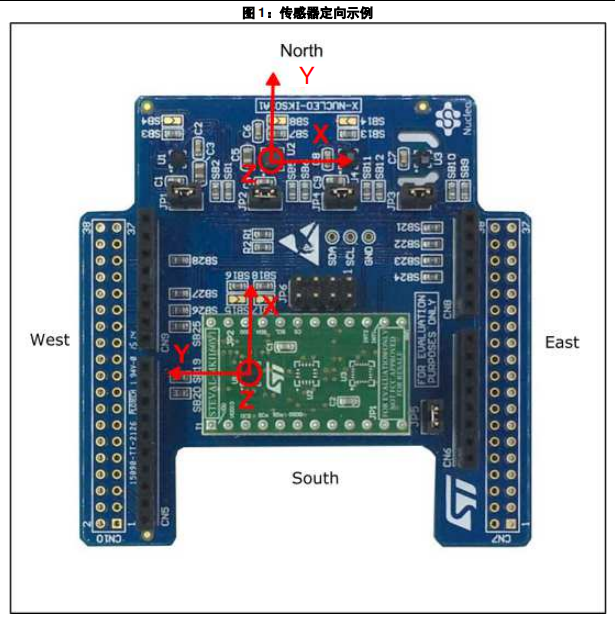
2 MotionFX middleware library in X-CUBE-MEMS1 software expansion for STM32Cube 2.1 MotionFX 概述 MotionFX 库扩展了 X-CUBE-MEMS1 软件的功能。 该库从加速度计、陀螺仪(6 轴融合)和磁力计(9 轴融合)获取数据,并提供实时运动传感器数据融合。 无论环境条件如何,MotionFX 滤波和预测软件都利用高级算法智能地对来自多个 MEMS 传感器的输出进行整合,可以实现最佳性能。 X-NUCLEO-IKS01A2 和 X-NUCLEO-IKS01A1(可选 STEVAL-MKI160V1)扩展板上提供了一个示例实现,安装在 NUCLEO-F401RE 或 NUCLEO-L476RG 开发板上。 2.2 MotionFX 库 在“Documentation”文件夹的 HTML 文件(使用 MotionFX_Package.chm 编译)中,提供了完整描述 MotionFX API 的功能和参数的技术信息。 2.2.1 MotionFX 库说明 MotionFX 传感器融合库可管理从加速度计、陀螺仪和磁力计传感器获取的数据;它能够: • 实时 9 轴运动传感器数据融合(加速度计,陀螺仪,磁力计) • 实时 6 轴运动传感器数据融合(加速度计,陀螺仪) • 计算旋转、四元数、重力和线性加速度数据 • 陀螺仪偏差校准 • 磁力计硬铁校准 • 建议传感器数据采样频率为 100 Hz • 45 kB 的代码和 8 kB 的数据存储器 实际空间大小对于不同的 IDE(工具链)可能不同 • 适用于 ARM Cortex-M4 架构 2.2.2 MotionFX 6 轴和 9 轴传感器融合模式 MotionFX 库实现了传感器融合算法,用来估算空间中的 3D 方向。它使用基于 Kalman 理论的数字滤波器来融合来自多个传感器的数据,并补偿单个传感器的限制。例如,陀螺仪数据可能会漂移,这会影响定向估计;这个问题可以通过使用磁力计提供绝对定向信息来解决。 类似地,磁力计带宽不高,并且受磁力干扰,但是这些弱点可利用陀螺仪来进行补偿。 9 轴传感器融合使用来自加速度计、陀螺仪和磁力计的数据,并提供 3D 空间中的绝对定向,包括航向(即磁性北方向)。 6 轴传感器融合仅使用加速度计和陀螺仪数据。它对计算要求较低,但不能提供有关器件绝对定向的信息。 6 轴传感器融合适用于快速移动(例如,游戏中)并且不需要绝对定位时的场景。 2.2.3 MotionFX 库操作 MotionFX 库将 6 轴和 9 轴传感器融合算法集成在一个库中;甚至可以同时运行它们。 该库实现了传感器融合计算相关的以下关键内部函数: 1. MotionFX_propagate 是用于估计 3D 空间中定向的预测函数;在此阶段给予了陀螺仪数据更高权重。 2. MotionFX_update 是校正函数,可在需要时调整预测值;这个阶段给予了加速度计和磁力计数据更高权重。 每当调用 MotionFX_propagate 时,都可调用 MotionFX_update 函数,在计算能力较小的系统中不经常调用该函数。 MotionFX_update 函数大约比 MotionFX_propagate 函数多花费三倍的 MCU 计算时间。 2.2.4 MotionFX 库参数 MotionFX 库使用 MFX_knobs_t 结构体进行“参数化”。 结构体参数如下: • ATime、MTime、FrTime 表示用于预测的传感器(信任因子)的加权稳定性,从 0 到 1。 建议使用默认值。 • LMode 代表陀螺仪偏差学习模式;库能够自动监测校准条件并进行零偏校准。 此可能的参数值是: − LMode = 0 – 学习关闭;如果陀螺仪已校准,则使用此模式 − LMode = 1 – 静态学习;仅当系统不动时进行学习 − LMode = 2 – 动态学习;系统移动时也进行学习 • gbias_acc/gyro/mag_th_sc_6X, gbias_acc/gyro/mag_th_sc_9X 表示阈值,低于这些阈值时 gbias 算法自动启动。这些值应通过测试来确定(不同型号器件对应不同的阈值)。 示例项目中的值通常是正确的 − modx 表示 MotionFX_update 调用频率的抽取 − output_type 用于定义融合库输出数据的坐标系统类型:0 = NED,1 = ENU − start_automatic_gbias_calculation 表示一个标志,当该标志设置为 1 时可重新启动陀螺仪偏差校准 − acc/gyro/mag_orientation 是由三个字符组成的 acc/gyro/mag 数据定向字符串,指示速度计数据输出使用的参考框架的每个正定向的方向,顺序为 x、y、z。有效值为:n(北)或 s(南),w(西)或 e(东),u(上)或 d(下)。 如下图所示,X-NUCLEO-IKS01A1 加速度计传感器采用 ENU 定向(x - 东,y - 北,z - 上),因此字符串为“enu”,而 STEVAL-MKI160V1 中的加速度计传感器为 NWU 定向(x-北,y-西,z-上),字符串为“nwu”。 WXKS.png")
MotionFX_propagate 和 MotionFX_update 函数从 MFX_input_t 结构体获取传感器数据: • mag 表示校准后的磁力计数据,以 µT/ 50 计 • acc 表示加速度计数据,以 g 计 • gyro 表示陀螺仪数据,以 dps 计 MotionFX_propagate 和 MotionFX_update 将融合算法输出保存到 MFX_output_t 结构体中: • rotation_6/9X 表示系统定向为三角格式:偏航角,俯仰角,翻滚角 • quaternion_6/9X 表示系统定向四元素格式;此格式可提供与 rotation_6/9X 同样的信息,但它在计算方面具有优势,因此通常用于其他算法(基于传感器融合)。 • gravity_6/9X 表示从加速度数据中所得到的静态加速度(即,地球重力)向量 • linear_acceleration_6/9X 表示从加速度数据中得到的动态加速度(即,移动)向量。 完整版请查看:附件  UM2220 STM32Cube 的X-CUBE-MEMS1 扩展软件中MotionFX 传感器融合库使用入门.pdf.pdf
(1.34 MB, 下载次数: 73)
UM2220 STM32Cube 的X-CUBE-MEMS1 扩展软件中MotionFX 传感器融合库使用入门.pdf.pdf
(1.34 MB, 下载次数: 73)
|
ST MEMS 传感器六大应用领域全覆盖
ST MEMS 传感器全家族 —— 覆盖运动 / 环境 / 红外 / 生物 / 声学全品类
MEMS科普小课堂|小小MEMS大能量,解锁智能世界核心密码
【STEVAL-STWINKT1B评测】音频采集
如何使用 IIS2DULPX 实现鼓风机状态识别
白皮书|如何平衡便携设备的测量精度与续航焦虑?ST IMU给出破局之道
LSM6DSV320X模块开箱与在钢筋绑扎机器人上的试用
基于ST AIoT Craft与机器学习内核的边缘AI解决方案
【LSM6DSV320X评测】基于MLC机器学习的6D位置识别和振动强度检测
【LSM6DSV320X评测】有限状态机FSM与ASC功能结合实现自动低功耗
 微信公众号
微信公众号
 手机版
手机版