|
一:模块开箱与基础参数 评估套件以 STEVAL-MKI109D 主板为核心,搭配 LSM6DSV320X 传感器模块 。 开箱内容包括: 外观特征:
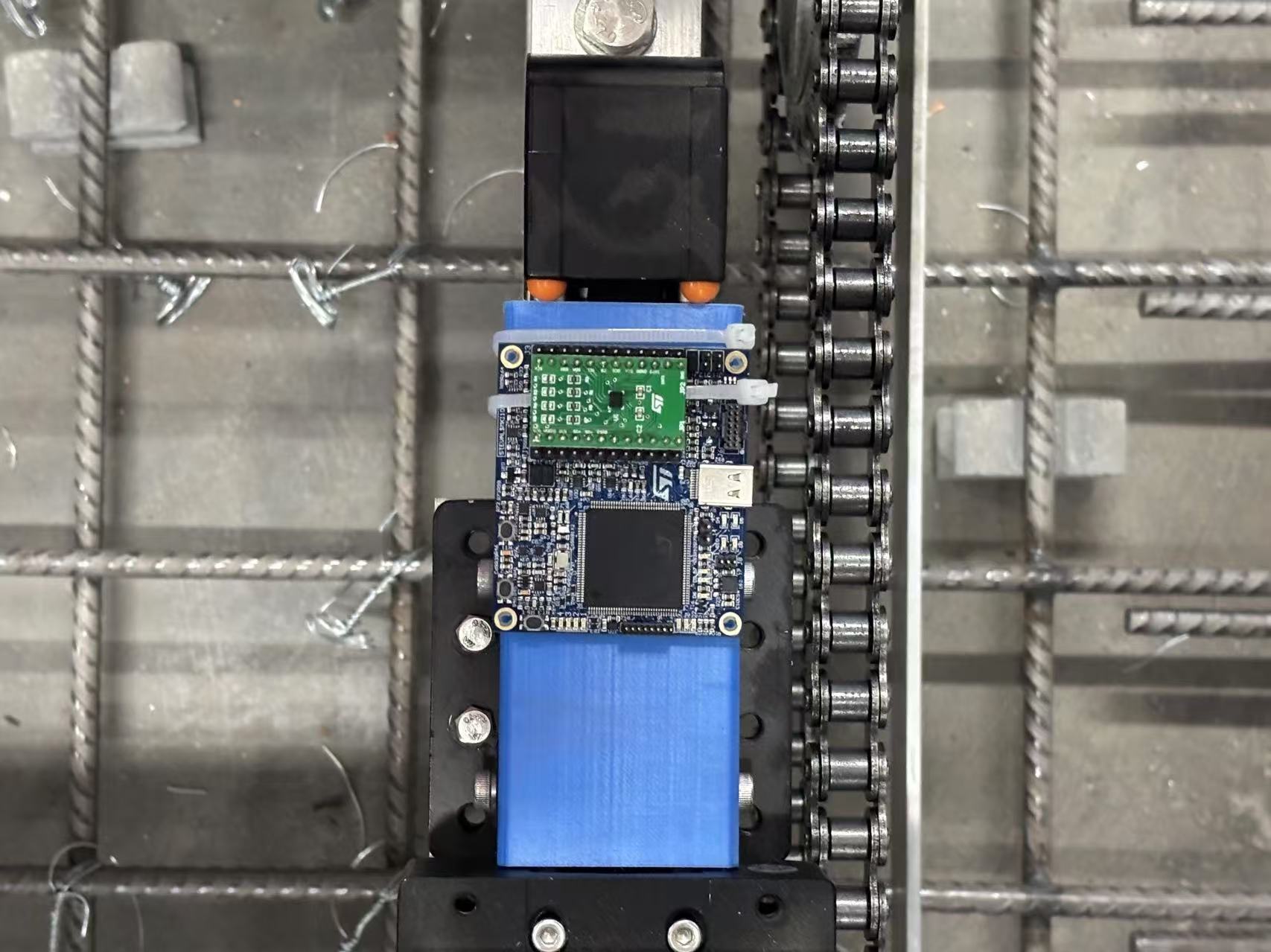
模块整体采用主控板和传感器分离的结构,小板可插拔,便于替换不同 MEMS 传感器。 主板提供 USB ,可直接连接电脑进行数据采集, SPI/I²C 接口,可接入自己传感器,扩展性强,预留有STlinkV3的接口,可开发自己的代码。 小板中央可见微型 LGA 封装的 LSM6DSV320X 芯片(2.5 × 3.0 × 0.83 mm),周围引出了全部功能引脚。 开箱总体感觉:结构紧凑、接口完善、即插即用,非常适合实验室和开发测试使用。 二:模块的简单使用 在实验室环境下,我们将 LSM6DSV320X 插在 STEVAL-MKI109D 主板上,并且将主板安装在机器人上,通过USB将模块连接至电脑,利用 ST MEMS Studio 进行实时数据采集与可视化。
通过USB连接到 ST MEMS Studio,选择主板为 STEVAL-MKI251A ,配置模块的基本参数。
直接读取机器人静止时的姿态数据。
注:由于机器人目前还处于实验室阶段,放一段机器人的步态运动gif运动图,就不放高清视频了 注:发现论坛好像上传视频不方便,视频也上传不了了,就简单贴个截图算了。
1.机器人前后运动姿态及冲击加速度测量 

ST MEMS 传感器六大应用领域全覆盖
ST MEMS 传感器全家族 —— 覆盖运动 / 环境 / 红外 / 生物 / 声学全品类
MEMS科普小课堂|小小MEMS大能量,解锁智能世界核心密码
【STEVAL-STWINKT1B评测】音频采集
【STEVAL-STWINKT1B评测】打印传感器数据
如何使用 IIS2DULPX 实现鼓风机状态识别
白皮书|如何平衡便携设备的测量精度与续航焦虑?ST IMU给出破局之道
【LSM6DSV320X评测】 -02-如何移植官方程序
【LSM6DSV320X评测】 -01-初步准备
基于ST AIoT Craft与机器学习内核的边缘AI解决方案
 微信公众号
微信公众号
 手机版
手机版












.gif")

(2).gif")

(1).gif")





