本文将带你从零实现LSM6DSV320X IMU传感器在Linux平台的驱动移植,并开发具备四元数和欧拉角解算的完整姿态感知应用。
<iframe src="https://player.bilibili.com/player.html?bvid=BV15W1wByESe&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>
项目背景
LSM6DSV320X是一款高端、低噪声、低功耗小型IMU,集成16 g三轴数字低g加速度计、320 g三轴数字高g加速度计及三轴数字陀螺仪,提供最佳IMU传感器性能,采用四个单独通道(用户界面、OIS、EIS和高g加速度计数据通道)独立处理加速度与角速率数据,具有专用配置、处理和滤波功能,并配备专用高g传感器实现高g冲击与汽车碰撞检测。
虽然在STM32生态中有完善的HAL驱动支持,但在Linux平台的资料相对较少。本项目成功将官方驱动移植到Linux环境,并实现了实时姿态感知功能。
第一次写Linux驱动的项目,可能有许多笔误 还希望各位大佬多多包涵。有错误帮忙指出
之所以选择树莓派是因为其底层IIC驱动已经相对完善 ,一致起来节省时间 目前也在学习MP2系列的MPU,后续有机会也会写一篇MP257移植LSM6D的帖子
硬件准备

树莓派的硬件pinout如上 我们使用的是IIC接口 所以需要使用GPIO2 GPIO3 两个引脚
EVM板硬件连接

主板侧面引出排针直接连接IIC接口就可以

需要注意的一点是板卡的供电 由于树莓派接口使用的是3V3通信的电平 所以我们将传感器板的供电冒取下 改为右侧两个针并联 将树莓派的3V3连接到VDD上,这样就完成了在无需软件修改主板供电的情况下给传感器供电,(主板给传感器的电压默认为1.1V 如果Typec给主板供电可能会出现通信问题和电流倒灌)。
连接完成后 我们使用i2c工具探测连接

如图 出现0X6A即为传感器已经被Linux板卡识别到
使用i2cget工具读取who am i寄存器

出现0x73即linux与传感器通信正常
软件准备
访问ST官网 查找ST的传感器驱动库
https://github.com/STMicroelectronics/lsm6dsv320x-pid.git
clone下来驱动库, 我们只需要重新实现在Linux平台下的IIC读写操作即可
项目结构说明

reg结尾是ST官方驱动库函数 其中包括了传感器的初始化 以及寄存器地址 配置枚举变量 我们直接引用即可
rpi是我们的应用文件 这三个文件要放在同一个目录之下
否侧GCC编译会报错。
项目流程
项目初始化流程如下所示 主要是初始化变量以及打开IIC总线并设置IIC从设备地址(0X6A)和异常处理 正常打开后计入后将句柄传入ST驱动库中提供的句柄进行初始化驱动上下文。

IIC总线打开正常后,会读取传感器的WHO_AM_I寄存器并验证,读取并验证无误后复位一次传感器, 开始配置传感器参数(ACC : 120HZ ±4g 陀螺仪: 120Hz ±2000dps BPU启用),并获取一次时间戳。参数设置原理可以参考我上一篇帖子中 使用MEMS_Studio 的Easy Config配置传感器

传感器参数配置完成后 就开始整个应用逻辑
- 计算时间间隔(dt)
↓
- 检查数据就绪状态
↓
- 如果数据就绪:
- 读取加速度计数据 → 转换为mg和g
- 读取陀螺仪数据 → 转换为mdps和dps
- 计算四元数姿态
- 计算欧拉角
↓
- 显示所有数据
↓
- 延迟50ms
↓
- 返回步骤1

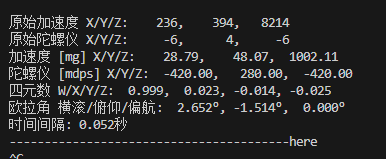
数据输出格式为四种:
原始加速度: [x, y, z] // 16位原始数据
物理加速度: [ax, ay, az] // 毫克单位
姿态四元数: [w, x, y, z] // 归一化四元数
欧拉角度: [横滚, 俯仰, 偏航] // 度单位
由于是先行评估验证 关于欧拉角的偏航角积分偏移问题还没有处理 所以在代码中并未进行转换,输出数据一直为0,后续可以移植AHRS的参考算法进行磁力计纠偏;
应用层代码解析
题主之前也不是linux开发者,目前只是新手 下文中如有错误还请多多海涵
这个操作框架设计如下

I2C驱动层实现
首先需要实现Linux平台的I2C读写接口:
static int32_t rpi_i2c_write(void *handle, uint8_t reg,
const uint8_t *buf, uint16_t len)
{
int fd = *(int *)handle;
struct i2c_msg msg;
struct i2c_rdwr_ioctl_data ioctl_data;
// 构建发送缓冲区(寄存器地址+数据)
uint8_t *tx_buf = malloc(len + 1);
tx_buf[0] = reg;
memcpy(&tx_buf[1], buf, len);
// 配置I2C消息
msg.addr = LSM6DSV320X_I2C_ADD;
msg.flags = 0; // 写操作
msg.len = len + 1;
msg.buf = tx_buf;
// 执行IOCTL调用
if (ioctl(fd, I2C_RDWR, &ioctl_data) < 0) {
perror("I2C写错误");
free(tx_buf);
return -1;
}
free(tx_buf);
return 0;
}
关于ioctl子系统的相关只是可以在bilibili搜索MP157 Ioctl子系统相关视频
传感器初始化配置
// 设备检测和初始化
int fd = open("/dev/i2c-1", O_RDWR);
ioctl(fd, I2C_SLAVE, 0x6A); // 设置传感器地址
// 初始化驱动上下文
stmdev_ctx_t dev_ctx;
dev_ctx.write_reg = rpi_i2c_write;
dev_ctx.read_reg = rpi_i2c_read;
dev_ctx.handle = &fd;
// 验证设备ID
uint8_t who_am_i;
lsm6dsv320x_device_id_get(&dev_ctx, &who_am_i);
printf("设备ID: 0x%02X\n", who_am_i);
// 传感器配置
lsm6dsv320x_xl_data_rate_set(&dev_ctx, LSM6DSV320X_ODR_AT_120Hz); // 加速度计120Hz
lsm6dsv320x_gy_data_rate_set(&dev_ctx, LSM6DSV320X_ODR_AT_120Hz); // 陀螺仪120Hz
lsm6dsv320x_xl_full_scale_set(&dev_ctx, LSM6DSV320X_4g); // ±4g量程
lsm6dsv320x_gy_full_scale_set(&dev_ctx, LSM6DSV320X_2000dps); // ±2000dps量程
这里实现的关键一步是
// 设备检测和初始化
int fd = open("/dev/i2c-1", O_RDWR);
ioctl(fd, I2C_SLAVE, 0x6A); // 设置传感器地址
// 初始化驱动上下文
stmdev_ctx_t dev_ctx;
dev_ctx.write_reg = rpi_i2c_write;
dev_ctx.read_reg = rpi_i2c_read;
dev_ctx.handle = &fd;
Linux中可以将文件视作操作的最小单位,这里iic1总线视作文件打开,并将上文中实现的操作接口函数以指针的形式赋值给ST驱动接口平台
打开文件对应Linux内核中通过VFS访问IIC驱动。。
ioctl工作原理 :
// ioctl调用流程:
用户空间 → 系统调用 → 内核VFS → I2C核心层 → I2C适配器驱动
// 在内核中的实现大致如下:
static long i2c_dev_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
switch (cmd) {
case I2C_SLAVE:
// 设置从设备地址到i2c_client结构体
client->addr = arg;
break;
}
}
其次是初始化一个接口体对象,这部分在St驱动代码中 我们直接引用
stmdev_ctx_t dev_ctx;
结构体的定义:
typedef struct {
int32_t (*write_reg)(void *handle, uint8_t reg, const uint8_t *buf, uint16_t len);
int32_t (*read_reg)(void *handle, uint8_t reg, uint8_t *buf, uint16_t len);
void *handle;
void (*mdelay)(uint32_t millisec);
} stmdev_ctx_t;
//write_reg:函数指针,指向寄存器写函数
//read_reg:函数指针,指向寄存器读函数
//handle:泛型指针,用于传递平台特定数据
//mdelay:函数指针,指向延迟函数(可选)
我们的设计模式是将IIC操作统一成抽象的接口,即上文中实现的rpi的iic驱动层实现
这样就可以在不同平台中复用相同业务逻辑的代码 只需要移植驱动层函数即可
所以在rpi驱动实现中,保持了和ST一样的参数
// ST驱动期望的函数签名
int32_t (*write_reg)(void *handle, uint8_t reg, const uint8_t *buf, uint16_t len);
int32_t (*read_reg)(void *handle, uint8_t reg, uint8_t *buf, uint16_t len);
// 我们的平台实现必须匹配这个签名
static int32_t rpi_i2c_write(void *handle, uint8_t reg, const uint8_t *buf, uint16_t len);
static int32_t rpi_i2c_read(void *handle, uint8_t reg, uint8_t *buf, uint16_t len);
通过以上实现思路 我们即可在Linux系统下完成通过IIC读写传感器寄存器的操作。
传感器的初始化操作
实现了寄存器的访问后,应用层上编写逻辑就和STM32这类MCU相差不大,就是封装函数在写入即可,具体封装实现逻辑可以参考文末附件
// 设备检测和初始化
int fd = open("/dev/i2c-1", O_RDWR);
ioctl(fd, I2C_SLAVE, 0x6A); // 设置传感器地址
// 初始化驱动上下文
stmdev_ctx_t dev_ctx;
dev_ctx.write_reg = rpi_i2c_write;
dev_ctx.read_reg = rpi_i2c_read;
dev_ctx.handle = &fd;
// 验证设备ID
uint8_t who_am_i;
lsm6dsv320x_device_id_get(&dev_ctx, &who_am_i);
printf("设备ID: 0x%02X\n", who_am_i);
// 传感器配置
lsm6dsv320x_xl_data_rate_set(&dev_ctx, LSM6DSV320X_ODR_AT_120Hz); // 加速度计120Hz
lsm6dsv320x_gy_data_rate_set(&dev_ctx, LSM6DSV320X_ODR_AT_120Hz); // 陀螺仪120Hz
lsm6dsv320x_xl_full_scale_set(&dev_ctx, LSM6DSV320X_4g); // ±4g量程
lsm6dsv320x_gy_full_scale_set(&dev_ctx, LSM6DSV320X_2000dps); // ±2000dps量程
姿态解算
本项目实现了基于互补滤波的实时姿态解算:
// 四元数计算函数
static void calculate_quaternion(float accel[3], float gyro[3],
float dt, float q[4])
{
// 加速度计数据归一化
float norm = sqrt(accel[0]*accel[0] + accel[1]*accel[1] + accel[2]*accel[2]);
if (norm > 0.0f) {
accel[0] /= norm; accel[1] /= norm; accel[2] /= norm;
}
// 陀螺仪数据转换(度/秒 → 弧度/秒)
float gx = gyro[0] * M_PI / 180.0f;
float gy = gyro[1] * M_PI / 180.0f;
float gz = gyro[2] * M_PI / 180.0f;
// 互补滤波误差校正
float vx = 2.0f * (q_prev[1]*q_prev[3] - q_prev[0]*q_prev[2]);
float vy = 2.0f * (q_prev[0]*q_prev[1] + q_prev[2]*q_prev[3]);
float vz = q_prev[0]*q_prev[0] - q_prev[1]*q_prev[1]
- q_prev[2]*q_prev[2] + q_prev[3]*q_prev[3];
// 误差积分和反馈校正
float ex = (accel[1]*vz - accel[2]*vy);
float ey = (accel[2]*vx - accel[0]*vz);
float ez = (accel[0]*vy - accel[1]*vx);
// 四元数微分方程数值积分
float qdot[4];
qdot[0] = 0.5f * (-q_prev[1]*gx - q_prev[2]*gy - q_prev[3]*gz);
qdot[1] = 0.5f * (q_prev[0]*gx + q_prev[2]*gz - q_prev[3]*gy);
// ... 其他分量计算
// 积分和归一化
for(int i = 0; i < 4; i++)
q[i] = q_prev[i] + qdot[i] * dt;
norm = sqrt(q[0]*q[0] + q[1]*q[1] + q[2]*q[2] + q[3]*q[3]);
for(int i = 0; i < 4; i++)
q[i] /= norm;
}
四元数转欧拉角
static void quaternion_to_euler(float q[4], float euler[3])
{
float w = q[0], x = q[1], y = q[2], z = q[3];
// 横滚角 (Roll)
float sinr_cosp = 2.0f * (w * x + y * z);
float cosr_cosp = 1.0f - 2.0f * (x * x + y * y);
euler[0] = atan2(sinr_cosp, cosr_cosp) * 180.0f / M_PI;
// 俯仰角 (Pitch)
float sinp = 2.0f * (w * y - z * x);
if (fabs(sinp) >= 1.0f)
euler[1] = copysign(90.0f, sinp);
else
euler[1] = asin(sinp) * 180.0f / M_PI;
// 偏航角 (Yaw)
float siny_cosp = 2.0f * (w * z + x * y);
float cosy_cosp = 1.0f - 2.0f * (y * y + z * z);
euler[2] = atan2(siny_cosp, cosy_cosp) * 180.0f / M_PI;
}
该部分参考可以参照哈尔滨工程大学创梦之翼战队 韭菜的菜开源
四元数EKF姿态更新算法 - 知乎
RoboMaster机器人姿态解算方案开源 - 知乎
代码编译
先前已经说了 驱动库和APP要放在一个目录下
gcc -o lsm6dsv320x_test lsm6dsv320x_rpi.c lsm6dsv320x_reg.c -lm
./lsm6dsv320x_test

执行效果
 微信公众号
微信公众号
 手机版
手机版