30.1 初学者重要提示
学习本章节前,务必优先学习第29章。
串口FIFO的实现跟前面章节按键FIFO的机制是一样的。
本章节比较重要,因为后面的ESP8266,GPS,RS485,GPRS等试验都是建立在这个驱动的基础上实现。
大家自己做的板子,测试串口收发是乱码的话,重点看stm32h7xx_hal_conf.h文件中的HSE_VALUE的大小跟板子上实际晶振大小是否一致,然后再看PLL配置。
CH340/CH341的USB转串口Windows驱动程序的安装包,支持32/64位 Windows 10/8.1/8/7。
30.2 硬件设计
STM32H743XIH6最多可以支持8个独立的串口。其中串口4和串口5和SDIO的GPIO是共用的,也就是说,如果要用到SD卡,那么串口4和串口5将不能使用。串口7和SPI3共用,串口8和RGB硬件接口共用。串口功能可以分配到不同的GPIO。我们常用的引脚分配如下:
串口USART1 TX = PA9, RX = PA10
串口USART2 TX = PA2, RX = PA3
串口USART3 TX = PB10, RX = PB11
串口UART4 TX = PC10, RX = PC11 (和SDIO共用)
串口UART5 TX = PC12, RX = PD2 (和SDIO共用)
串口USART6 TX = PG14, RX = PC7
串口UART7 TX = PB4, RX = PB3 (和SPI1/3共用)
串口UART8 TX = PJ8, RX =PJ9 (和RGB硬件接口共用)
STM32-V7开发板使用了4个串口设备。
串口1用于RS232接口,很多例子的pritnf结果就是输出到串口1
串口2用于GPS
串口3用于RS485接口
串口6 用于TTL串口插座,板子上有GPRS插座和串口WIFI插座。
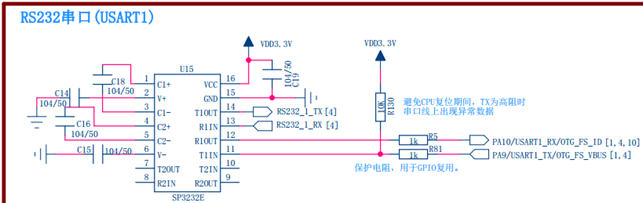
下面是RS232的原理图:
关于232的PHY芯片SP3232E要注意以下几个问题:
SP3232E的作用是TTL电平转RS232电平。
电阻R130的作用是避免CPU复位期间,TX为高阻时串口线上出现异常数据。
检测SP3232E的好坏可以采用回环的方式,即短接T1OUT和R1IN,对应到DB9插座上就是短接引脚2和引脚3。
实际效果如下:
通过这种方式,可以在应用程序中通过串口发送几个字符,查看是否可以正确接收来判断232 PHY芯片是否有问题。
由于这里是TTL转RS232,如果电脑端自带DB9串口,可以找根交叉线直接接上。如果电脑端没有,就需要用RS232转USB的串口线。这里要注意是RS232转USB,不是TTL转USB。像我们用的CH340就是RS232转USB芯片。
检测串口线的好坏跟板子上的232 PHY一样,将电脑端的串口助手打开,串口线接到电脑端并短接串口线的2脚和3脚,然后使用串口助手进行自收发测试即可。
30.3 串口FIFO驱动设计
30.3.1 串口FIFO框架
为了方便大家理解,先来看下串口FIFO的实现框图:
第1阶段,初始化:
通过函数bsp_InitUart初始化串口结构体,串口硬件参数。
第2阶段,串口中断服务程序:
接收中断是一直开启的。
做了发送空中断和发送完成中断的消息处理。
第3阶段,串口数据的收发:
串口发送函数会开启发送空中断。
串口接收中断接收到函数后,可以使用函数comGetChar获取数据。
30.3.2 串口FIFO之相关的变量定义
串口驱动的核心文件为:bsp_uart_fifo.c, bsp_uart_fifo.h。
这里面包括有串口硬件的配置函数、中断处理函数,以及串口的读写接口函数。还有ptinft函数的实现。
每个串口都有2个FIFO缓冲区,一个是用于发送数据的TX_FIFO,一个用于保存接收数据的RX_FIFO。
我们来看下这个FIFO的定义,在bsp_uart_fifo.h文件。
- /* 定义串口波特率和FIFO缓冲区大小,分为发送缓冲区和接收缓冲区, 支持全双工 */
- #if UART1_FIFO_EN == 1
- #define UART1_BAUD 115200
- #define UART1_TX_BUF_SIZE 1*1024
- #define UART1_RX_BUF_SIZE 1*1024
- #endif
- /* 串口设备结构体 */
- typedef struct
- {
- USART_TypeDef *uart; /* STM32内部串口设备指针 */
- uint8_t *pTxBuf; /* 发送缓冲区 */
- uint8_t *pRxBuf; /* 接收缓冲区 */
- uint16_t usTxBufSize; /* 发送缓冲区大小 */
- uint16_t usRxBufSize; /* 接收缓冲区大小 */
- __IO uint16_t usTxWrite; /* 发送缓冲区写指针 */
- __IO uint16_t usTxRead; /* 发送缓冲区读指针 */
- __IO uint16_t usTxCount; /* 等待发送的数据个数 */
- __IO uint16_t usRxWrite; /* 接收缓冲区写指针 */
- __IO uint16_t usRxRead; /* 接收缓冲区读指针 */
- __IO uint16_t usRxCount; /* 还未读取的新数据个数 */
- void (*SendBefor)(void); /* 开始发送之前的回调函数指针(主要用于RS485切换到发送模式) */
- void (*SendOver)(void); /* 发送完毕的回调函数指针(主要用于RS485将发送模式切换为接收模式) */
- void (*ReciveNew)(uint8_t _byte); /* 串口收到数据的回调函数指针 */
- uint8_t Sending; /* 正在发送中 */
- }UART_T;
bsp_uart_fifo.c文件定义变量。我们以串口1为例,其他的串口都是一样的代码。
- /* 定义每个串口结构体变量 */
- #if UART1_FIFO_EN == 1
- static UART_T g_tUart1;
- static uint8_t g_TxBuf1[UART1_TX_BUF_SIZE]; /* 发送缓冲区 */
- static uint8_t g_RxBuf1[UART1_RX_BUF_SIZE]; /* 接收缓冲区 */
- #endif
关于FIFO的机制,我们在按键FIFO驱动已经做过详细的介绍,这个地方就不赘述了。每个串口有两个FIFO缓冲区,每个FIFO对应一个写指针和一个读指针。这个结构中还有三个回调函数。回调函数就是一个通过函数指针调用的函数。如果你把函数的指针(地址)作为参数传递给另一个函数,当这个指针被用为调用它所指向的函数时,我们就说这是回调函数。
30.3.3 串口FIFO初始化
串口的初始化代码如下;
- /*
- ---
- * 函 数 名: bsp_InitUart
- * 功能说明: 初始化串口硬件,并对全局变量赋初值.
- * 形 参: 无
- * 返 回 值: 无
- ---
- */
- void bsp_InitUart(void)
- {
- UartVarInit(); /* 必须先初始化全局变量,再配置硬件 */
- InitHardUart(); /* 配置串口的硬件参数(波特率等) */
- RS485_InitTXE(); /* 配置RS485芯片的发送使能硬件,配置为推挽输出 */
- }
下面将初始化代码实现的功能依次为大家做个说明。
函数UartVarInit
这个函数实现的功能比较好理解,主要是串口设备结构体变量的初始化,代码如下:
- /*
- ---
- * 函 数 名: UartVarInit
- * 功能说明: 初始化串口相关的变量
- * 形 参: 无
- * 返 回 值: 无
- ---
- */
- static void UartVarInit(void)
- {
- #if UART1_FIFO_EN == 1
- g_tUart1.uart = USART1; /* STM32 串口设备 */
- g_tUart1.pTxBuf = g_TxBuf1; /* 发送缓冲区指针 */
- g_tUart1.pRxBuf = g_RxBuf1; /* 接收缓冲区指针 */
- g_tUart1.usTxBufSize = UART1_TX_BUF_SIZE; /* 发送缓冲区大小 */
- g_tUart1.usRxBufSize = UART1_RX_BUF_SIZE; /* 接收缓冲区大小 */
- g_tUart1.usTxWrite = 0; /* 发送FIFO写索引 */
- g_tUart1.usTxRead = 0; /* 发送FIFO读索引 */
- g_tUart1.usRxWrite = 0; /* 接收FIFO写索引 */
- g_tUart1.usRxRead = 0; /* 接收FIFO读索引 */
- g_tUart1.usRxCount = 0; /* 接收到的新数据个数 */
- g_tUart1.usTxCount = 0; /* 待发送的数据个数 */
- g_tUart1.SendBefor = 0; /* 发送数据前的回调函数 */
- g_tUart1.SendOver = 0; /* 发送完毕后的回调函数 */
- g_tUart1.ReciveNew = 0; /* 接收到新数据后的回调函数 */
- g_tUart1.Sending = 0; /* 正在发送中标志 */
- #endif
- /* 串口2-8的初始化省略未写 */
- }
函数InitHardUart
此函数主要用于串口的GPIO,中断和相关参数的配置。
- 1. /* 串口1的GPIO PA9, PA10 RS323 DB9接口 */
- 2. #define USART1_CLK_ENABLE() __HAL_RCC_USART1_CLK_ENABLE()
- 3.
- 4. #define USART1_TX_GPIO_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE()
- 5. #define USART1_TX_GPIO_PORT GPIOA
- 6. #define USART1_TX_PIN GPIO_PIN_9
- 7. #define USART1_TX_AF GPIO_AF7_USART1
- 8.
- 9. #define USART1_RX_GPIO_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE()
- 10. #define USART1_RX_GPIO_PORT GPIOA
- 11. #define USART1_RX_PIN GPIO_PIN_10
- 12. #define USART1_RX_AF GPIO_AF7_USART1
- 13.
- 14. /* 串口2-8的引脚和时钟宏定义未写 */
- 15.
- 16. /*
- 17. ******************************************************************************************************
- 18. * 函 数 名: InitHardUart
- 19. * 功能说明: 配置串口的硬件参数(波特率,数据位,停止位,起始位,校验位,中断使能)适合于STM32-H7开
- 20. * 发板
- 21. * 形 参: 无
- 22. * 返 回 值: 无
- 23. ******************************************************************************************************
- 24. */
- 25. static void InitHardUart(void)
- 26. {
- 27. GPIO_InitTypeDef GPIO_InitStruct;
- 28. RCC_PeriphCLKInitTypeDef RCC_PeriphClkInit;
- 29.
- 30. /*
- 31. 下面这个配置可以注释掉,预留下来是为了方便以后选择其它时钟使用
- 32. 默认情况下,USART1和USART6选择的PCLK2,时钟100MHz。
- 33. USART2,USART3,UART4,UART5,UART6,UART7和UART8选择的时钟是PLCK1,时钟100MHz。
- 34. */
- 35. RCC_PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART16;
- 36. RCC_PeriphClkInit.Usart16ClockSelection = RCC_USART16CLKSOURCE_D2PCLK2;
- 37. HAL_RCCEx_PeriphCLKConfig(&RCC_PeriphClkInit);
- 38.
- 39. #if UART1_FIFO_EN == 1 /* 串口1 */
- 40. /* 使能 GPIO TX/RX 时钟 */
- 41. USART1_TX_GPIO_CLK_ENABLE();
- 42. USART1_RX_GPIO_CLK_ENABLE();
- 43.
- 44. /* 使能 USARTx 时钟 */
- 45. USART1_CLK_ENABLE();
- 46.
- 47. /* 配置TX引脚 */
- 48. GPIO_InitStruct.Pin = USART1_TX_PIN;
- 49. GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
- 50. GPIO_InitStruct.Pull = GPIO_PULLUP;
- 51. GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
- 52. GPIO_InitStruct.Alternate = USART1_TX_AF;
- 53. HAL_GPIO_Init(USART1_TX_GPIO_PORT, &GPIO_InitStruct);
- 54.
- 55. /* 配置RX引脚 */
- 56. GPIO_InitStruct.Pin = USART1_RX_PIN;
- 57. GPIO_InitStruct.Alternate = USART1_RX_AF;
- 58. HAL_GPIO_Init(USART1_RX_GPIO_PORT, &GPIO_InitStruct);
- 59.
- 60. /* 配置NVIC the NVIC for UART */
- 61. HAL_NVIC_SetPriority(USART1_IRQn, 0, 1);
- 62. HAL_NVIC_EnableIRQ(USART1_IRQn);
- 63.
- 64. /* 配置波特率、奇偶校验 */
- 65. bsp_SetUartParam(USART1, UART1_BAUD, UART_PARITY_NONE, UART_MODE_TX_RX);
- 66.
- 67. SET_BIT(USART1->ICR, USART_ICR_TCCF); /* 清除TC发送完成标志 */
- 68. SET_BIT(USART1->RQR, USART_RQR_RXFRQ); /* 清除RXNE接收标志 */
- 69. // USART_CR1_PEIE | USART_CR1_RXNEIE
- 70. SET_BIT(USART1->CR1, USART_CR1_RXNEIE); /* 使能PE. RX接受中断 */
- 71. #endif
- 72. /* 串口2-8的初始化省略未写 */
- 73. }
第2-12行,以宏定义的方式设置串口1-8的GPIO时钟、引脚和串口时钟,方便修改。
第35-37行,这里的配置可以注释掉,预留下来仅仅是为了方便以后选择其它时钟使用。默认情况下,USART1和USART6选择的PCLK2,时钟100MHz。USART2,USART3,UART4,UART5,UART6,UART7和UART8选择的时钟是PLCK1,时钟100MHz。
第61-62行,配置串口中断优先级并使能串口中断,用户可以根据实际工程修改优先级大小。
第65行,配置串口的基本参数,具体配置在函数里面有注释。
- /*
- *********************************************************************************************************
- * 函 数 名: bsp_SetUartParam
- * 功能说明: 配置串口的硬件参数(波特率,数据位,停止位,起始位,校验位,中断使能)适合于STM32- H7开发板
- * 形 参: Instance USART_TypeDef类型结构体
- * BaudRate 波特率
- * Parity 校验类型,奇校验或者偶校验
- * Mode 发送和接收模式使能
- * 返 回 值: 无
- *********************************************************************************************************
- */
- void bsp_SetUartParam(USART_TypeDef *Instance, uint32_t BaudRate, uint32_t Parity, uint32_t Mode)
- {
- UART_HandleTypeDef UartHandle;
-
- /*##-1- 配置串口硬件参数 ######################################*/
- /* 异步串口模式 (UART Mode) */
- /* 配置如下:
- - 字长 = 8 位
- - 停止位 = 1 个停止位
- - 校验 = 参数Parity
- - 波特率 = 参数BaudRate
- - 硬件流控制关闭 (RTS and CTS signals) */
-
- UartHandle.Instance = Instance;
-
- UartHandle.Init.BaudRate = BaudRate;
- UartHandle.Init.WordLength = UART_WORDLENGTH_8B;
- UartHandle.Init.StopBits = UART_STOPBITS_1;
- UartHandle.Init.Parity = Parity;
- UartHandle.Init.HwFlowCtl = UART_HWCONTROL_NONE;
- UartHandle.Init.Mode = Mode;
- UartHandle.Init.OverSampling = UART_OVERSAMPLING_16;
- UartHandle.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
- UartHandle.Init.Prescaler = UART_PRESCALER_DIV1;
- UartHandle.Init.FIFOMode = UART_FIFOMODE_DISABLE;
- UartHandle.Init.TXFIFOThreshold = UART_TXFIFO_THRESHOLD_1_8;
- UartHandle.Init.RXFIFOThreshold = UART_RXFIFO_THRESHOLD_1_8;
- UartHandle.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
-
- if (HAL_UART_Init(&UartHandle) != HAL_OK)
- {
- Error_Handler(__FILE__, __LINE__);
- }
- }
函数RS485_InitTXE
此函数主要用于485 PHY芯片的发送使能,直接配置引脚为推挽输出模式即可使用。具体代码如下:
- /*
- *********************************************************************************************************
- * 函 数 名: RS485_InitTXE
- * 功能说明: 配置RS485发送使能口线 TXE
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- void RS485_InitTXE(void)
- {
- GPIO_InitTypeDef gpio_init;
-
- /* 打开GPIO时钟 */
- RS485_TXEN_GPIO_CLK_ENABLE();
-
- /* 配置引脚为推挽输出 */
- gpio_init.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */
- gpio_init.Pull = GPIO_NOPULL; /* 上下拉电阻不使能 */
- gpio_init.Speed = GPIO_SPEED_FREQ_VERY_HIGH; /* GPIO速度等级 */
- gpio_init.Pin = RS485_TXEN_PIN;
- HAL_GPIO_Init(RS485_TXEN_GPIO_PORT, &gpio_init);
- }
30.3.4 串口中断服务程序工作流程
串口中断服务程序是最核心的部分,主要实现如下三个功能
收到新的数据后,会将数据压入RX_FIFO。
检测到发送缓冲区空后,会从TX_FIFO中取下一个数据并发送。
如果是RS485半双工串口,发送前会设置一个GPIO=1控制RS485收发器进入发送状态,当最后一个字节的最后一个bit传送完毕后,设置这个GPIO=0让RS485收发器进入接收状态。
下面我们分析一下串口中断处理的完整过程。
当产生串口中断后,CPU会查找中断向量表,获得中断服务程序的入口地址。入口函数为USART1_IRQHandler,这个函数在启动文件startup_stm32h743xx.s汇编代码中已经有实现。我们在c代码中需要重写一个同样名字的函数就可以重载它。如果不重载,启动文件中缺省的中断服务程序就是一个死循环,等于 while(1);
我们将串口中断服务程序放在bsp_uart_fifo.c文件,没有放到 stm32h7xx_it.c。当应用不需要串口功能时,直接从工程中删除bsp_uart_fifo.c接口,不必再去整理stm32h7xx_it.c这个文件。下面展示的代码是8个串口的中断服务程序:
- #if UART1_FIFO_EN == 1
- void USART1_IRQHandler(void)
- {
- UartIRQ(&g_tUart1);
- }
- #endif
- #if UART2_FIFO_EN == 1
- void USART2_IRQHandler(void)
- {
- UartIRQ(&g_tUart2);
- }
- #endif
- #if UART3_FIFO_EN == 1
- void USART3_IRQHandler(void)
- {
- UartIRQ(&g_tUart3);
- }
- #endif
- #if UART4_FIFO_EN == 1
- void UART4_IRQHandler(void)
- {
- UartIRQ(&g_tUart4);
- }
- #endif
- #if UART5_FIFO_EN == 1
- void UART5_IRQHandler(void)
- {
- UartIRQ(&g_tUart5);
- }
- #endif
- #if UART6_FIFO_EN == 1
- void USART6_IRQHandler(void)
- {
- UartIRQ(&g_tUart6);
- }
- #endif
- #if UART7_FIFO_EN == 1
- void UART7_IRQHandler(void)
- {
- UartIRQ(&g_tUart7);
- }
- #endif
- #if UART8_FIFO_EN == 1
- void UART8_IRQHandler(void)
- {
- UartIRQ(&g_tUart8);
- }
- #endif
大家可以看到,这8个中断服务程序都调用了同一个处理函数UartIRQ。我们只需要调通一个串口FIFO驱动,那么其他的串口驱动也就都通了。
下面,我们来看看UartIRQ函数的实现代码。
- /*
- *********************************************************************************************************
- * 函 数 名: UartIRQ
- * 功能说明: 供中断服务程序调用,通用串口中断处理函数
- * 形 参: _pUart : 串口设备
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void UartIRQ(UART_T *_pUart)
- {
- uint32_t isrflags = READ_REG(_pUart->uart->ISR);
- uint32_t cr1its = READ_REG(_pUart->uart->CR1);
- uint32_t cr3its = READ_REG(_pUart->uart->CR3);
-
- /* 处理接收中断 */
- if ((isrflags & USART_ISR_RXNE) != RESET)
- {
- /* 从串口接收数据寄存器读取数据存放到接收FIFO */
- uint8_t ch;
- ch = READ_REG(_pUart->uart->RDR); /* 读串口接收数据寄存器 */
- _pUart->pRxBuf[_pUart->usRxWrite] = ch; /* 填入串口接收FIFO */
- if (++_pUart->usRxWrite >= _pUart->usRxBufSize) /* 接收FIFO的写指针+1 */
- {
- _pUart->usRxWrite = 0;
- }
- if (_pUart->usRxCount < _pUart->usRxBufSize) /* 统计未处理的字节个数 */
- {
- _pUart->usRxCount++;
- }
- /* 回调函数,通知应用程序收到新数据,一般是发送1个消息或者设置一个标记 */
- //if (_pUart->usRxWrite == _pUart->usRxRead)
- //if (_pUart->usRxCount == 1)
- {
- if (_pUart->ReciveNew)
- {
- _pUart->ReciveNew(ch); /* 比如,交给MODBUS解码程序处理字节流 */
- }
- }
- }
- /* 处理发送缓冲区空中断 */
- if ( ((isrflags & USART_ISR_TXE) != RESET) && (cr1its & USART_CR1_TXEIE) != RESET)
- {
- //if (_pUart->usTxRead == _pUart->usTxWrite)
- if (_pUart->usTxCount == 0) /* 发送缓冲区已无数据可取 */
- {
- /* 发送缓冲区的数据已取完时, 禁止发送缓冲区空中断 (注意:此时最后1个数据还未真正发送完毕)*/
- //USART_ITConfig(_pUart->uart, USART_IT_TXE, DISABLE);
- CLEAR_BIT(_pUart->uart->CR1, USART_CR1_TXEIE);
- /* 使能数据发送完毕中断 */
- //USART_ITConfig(_pUart->uart, USART_IT_TC, ENABLE);
- SET_BIT(_pUart->uart->CR1, USART_CR1_TCIE);
- }
- Else /* 还有数据等待发送 */
- {
- _pUart->Sending = 1;
-
- /* 从发送FIFO取1个字节写入串口发送数据寄存器 */
- //USART_SendData(_pUart->uart, _pUart->pTxBuf[_pUart->usTxRead]);
- _pUart->uart->TDR = _pUart->pTxBuf[_pUart->usTxRead];
- if (++_pUart->usTxRead >= _pUart->usTxBufSize)
- {
- _pUart->usTxRead = 0;
- }
- _pUart->usTxCount--;
- }
- }
- /* 数据bit位全部发送完毕的中断 */
- if (((isrflags & USART_ISR_TC) != RESET) && ((cr1its & USART_CR1_TCIE) != RESET))
- {
- //if (_pUart->usTxRead == _pUart->usTxWrite)
- if (_pUart->usTxCount == 0)
- {
- /* 如果发送FIFO的数据全部发送完毕,禁止数据发送完毕中断 */
- //USART_ITConfig(_pUart->uart, USART_IT_TC, DISABLE);
- CLEAR_BIT(_pUart->uart->CR1, USART_CR1_TCIE);
- /* 回调函数, 一般用来处理RS485通信,将RS485芯片设置为接收模式,避免抢占总线 */
- if (_pUart->SendOver)
- {
- _pUart->SendOver();
- }
-
- _pUart->Sending = 0;
- }
- else
- {
- /* 正常情况下,不会进入此分支 */
- /* 如果发送FIFO的数据还未完毕,则从发送FIFO取1个数据写入发送数据寄存器 */
- //USART_SendData(_pUart->uart, _pUart->pTxBuf[_pUart->usTxRead]);
- _pUart->uart->TDR = _pUart->pTxBuf[_pUart->usTxRead];
- if (++_pUart->usTxRead >= _pUart->usTxBufSize)
- {
- _pUart->usTxRead = 0;
- }
- _pUart->usTxCount--;
- }
- }
-
- /* 清除中断标志 */
- SET_BIT(_pUart->uart->ICR, UART_CLEAR_PEF);
- SET_BIT(_pUart->uart->ICR, UART_CLEAR_FEF);
- SET_BIT(_pUart->uart->ICR, UART_CLEAR_NEF);
- SET_BIT(_pUart->uart->ICR, UART_CLEAR_OREF);
- SET_BIT(_pUart->uart->ICR, UART_CLEAR_IDLEF);
- SET_BIT(_pUart->uart->ICR, UART_CLEAR_TCF);
- SET_BIT(_pUart->uart->ICR, UART_CLEAR_LBDF);
- SET_BIT(_pUart->uart->ICR, UART_CLEAR_CTSF);
- SET_BIT(_pUart->uart->ICR, UART_CLEAR_CMF);
- SET_BIT(_pUart->uart->ICR, UART_CLEAR_WUF);
- SET_BIT(_pUart->uart->ICR, UART_CLEAR_TXFECF);
- }
中断服务程序的处理主要分为两部分,接收数据的处理和发送数据的处理,详情看程序注释即可,已经比较详细,下面重点把思路说一下。
接收数据处理
接收数据的处理是判断ISR寄存器的USART_ISR_RXNE标志是否置位,如果置位表示RDR接收寄存器已经存入数据。然后将数据读入到接收FIFO空间。
特别注意里面的ReciveNew处理,这个在Modbus协议里面要用到。
发送数据处理
发送数据主要是发送空中断TEX和发送完成中断TC的处理,当TXE=1时,只是表示发送数据寄存器为空了,此时可以填充下一个准备发送的数据了。当为TDR发送寄存器赋值后,硬件启动发送,等所有的bit传送完毕后,TC标志设置为1。如果是RS232全双工通信,可以只用TXE标志控制发送过程。如果是RS485半双工通信,就需要利用TC标志了,因为在最后一个bit传送完毕后,需要设置RS485收发器进入到接收状态。
30.3.5 串口数据发送
串口数据的发送主要涉及到下面三个函数:
- /*
- *********************************************************************************************************
- * 函 数 名: comSendBuf
- * 功能说明: 向串口发送一组数据。数据放到发送缓冲区后立即返回,由中断服务程序在后台完成发送
- * 形 参: _ucPort: 端口号(COM1 - COM8)
- * _ucaBuf: 待发送的数据缓冲区
- * _usLen : 数据长度
- * 返 回 值: 无
- *********************************************************************************************************
- */
- void comSendBuf(COM_PORT_E _ucPort, uint8_t *_ucaBuf, uint16_t _usLen)
- {
- UART_T *pUart;
- pUart = ComToUart(_ucPort);
- if (pUart == 0)
- {
- return;
- }
- if (pUart->SendBefor != 0)
- {
- pUart->SendBefor(); /* 如果是RS485通信,可以在这个函数中将RS485设置为发送模式 */
- }
- UartSend(pUart, _ucaBuf, _usLen);
- }
- /*
- *********************************************************************************************************
- * 函 数 名: comSendChar
- * 功能说明: 向串口发送1个字节。数据放到发送缓冲区后立即返回,由中断服务程序在后台完成发送
- * 形 参: _ucPort: 端口号(COM1 - COM8)
- * _ucByte: 待发送的数据
- * 返 回 值: 无
- *********************************************************************************************************
- */
- void comSendChar(COM_PORT_E _ucPort, uint8_t _ucByte)
- {
- comSendBuf(_ucPort, &_ucByte, 1);
- }
- /*
- *********************************************************************************************************
- * 函 数 名: UartSend
- * 功能说明: 填写数据到UART发送缓冲区,并启动发送中断。中断处理函数发送完毕后,自动关闭发送中断
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void UartSend(UART_T *_pUart, uint8_t *_ucaBuf, uint16_t _usLen)
- {
- uint16_t i;
- for (i = 0; i < _usLen; i++)
- {
- /* 如果发送缓冲区已经满了,则等待缓冲区空 */
- while (1)
- {
- __IO uint16_t usCount;
- DISABLE_INT();
- usCount = _pUart->usTxCount;
- ENABLE_INT();
- if (usCount < _pUart->usTxBufSize)
- {
- break;
- }
- else if(usCount == _pUart->usTxBufSize)/* 数据已填满缓冲区 */
- {
- if((_pUart->uart->CR1 & USART_CR1_TXEIE) == 0)
- {
- SET_BIT(_pUart->uart->CR1, USART_CR1_TXEIE);
- }
- }
- }
- /* 将新数据填入发送缓冲区 */
- _pUart->pTxBuf[_pUart->usTxWrite] = _ucaBuf;
- DISABLE_INT();
- if (++_pUart->usTxWrite >= _pUart->usTxBufSize)
- {
- _pUart->usTxWrite = 0;
- }
- _pUart->usTxCount++;
- ENABLE_INT();
- }
- SET_BIT(_pUart->uart->CR1, USART_CR1_TXEIE); /* 使能发送中断(缓冲区空) */
- }
函数comSendChar是发送一个字节,通过调用函数comSendBuf实现,而函数comSendBuf又是通过调用函数UartSend实现,这个函数是重点。
函数UartSend的作用就是把要发送的数据填到发送缓冲区里面,并使能发送空中断。
如果要发送的数据没有超过发送缓冲区大小,实现起来还比较容易,直接把数据填到FIFO里面,并使能发送空中断即可。
如果超过了FIFO大小,就需要等待有空间可用,针对这种情况有个重要的知识点,就是当缓冲刚刚填满的时候要判断发送空中断是否开启了,如果填满了还没有开启,就会卡死在while循环中,所以多了一个刚填满时的判断,填满了还没有开启发送空中断,要开启下。
注意:由于函数UartSend做了static作用域限制,仅可在bsp_uart_fifo.c文件中调用。函数comSendChar和comSendBuf是供用户调用的。
函数comSendBuf中调用了一个函数pUart = ComToUart(_ucPort),这个函数是将整数的COM端口号转换为UART结构体指针。
- /*
- *********************************************************************************************************
- * 函 数 名: ComToUart
- * 功能说明: 将COM端口号转换为UART指针
- * 形 参: _ucPort: 端口号(COM1 - COM8)
- * 返 回 值: uart指针
- *********************************************************************************************************
- */
- UART_T *ComToUart(COM_PORT_E _ucPort)
- {
- if (_ucPort == COM1)
- {
- #if UART1_FIFO_EN == 1
- return &g_tUart1;
- #else
- return 0;
- #endif
- }
- else if (_ucPort == COM2)
- {
- #if UART2_FIFO_EN == 1
- return &g_tUart2;
- #else
- return 0;
- #endif
- }
- else if (_ucPort == COM3)
- {
- #if UART3_FIFO_EN == 1
- return &g_tUart3;
- #else
- return 0;
- #endif
- }
- else if (_ucPort == COM4)
- {
- #if UART4_FIFO_EN == 1
- return &g_tUart4;
- #else
- return 0;
- #endif
- }
- else if (_ucPort == COM5)
- {
- #if UART5_FIFO_EN == 1
- return &g_tUart5;
- #else
- return 0;
- #endif
- }
- else if (_ucPort == COM6)
- {
- #if UART6_FIFO_EN == 1
- return &g_tUart6;
- #else
- return 0;
- #endif
- }
- else if (_ucPort == COM7)
- {
- #if UART7_FIFO_EN == 1
- return &g_tUart7;
- #else
- return 0;
- #endif
- }
- else if (_ucPort == COM8)
- {
- #if UART8_FIFO_EN == 1
- return &g_tUart8;
- #else
- return 0;
- #endif
- }
- else
- {
- Error_Handler(__FILE__, __LINE__);
- return 0;
- }
- }
30.3.6 串口数据接收
下面我们再来看看接收的函数:
- /*
- *********************************************************************************************************
- * 函 数 名: comGetChar
- * 功能说明: 从接收缓冲区读取1字节,非阻塞。无论有无数据均立即返回。
- * 形 参: _ucPort: 端口号(COM1 - COM8)
- * _pByte: 接收到的数据存放在这个地址
- * 返 回 值: 0 表示无数据, 1 表示读取到有效字节
- *********************************************************************************************************
- */
- uint8_t comGetChar(COM_PORT_E _ucPort, uint8_t *_pByte)
- {
- UART_T *pUart;
- pUart = ComToUart(_ucPort);
- if (pUart == 0)
- {
- return 0;
- }
- return UartGetChar(pUart, _pByte);
- }
- /*
- *********************************************************************************************************
- * 函 数 名: UartGetChar
- * 功能说明: 从串口接收缓冲区读取1字节数据 (用于主程序调用)
- * 形 参: _pUart : 串口设备
- * _pByte : 存放读取数据的指针
- * 返 回 值: 0 表示无数据 1表示读取到数据
- *********************************************************************************************************
- */
- static uint8_t UartGetChar(UART_T *_pUart, uint8_t *_pByte)
- {
- uint16_t usCount;
- /* usRxWrite 变量在中断函数中被改写,主程序读取该变量时,必须进行临界区保护 */
- DISABLE_INT();
- usCount = _pUart->usRxCount;
- ENABLE_INT();
- /* 如果读和写索引相同,则返回0 */
- //if (_pUart->usRxRead == usRxWrite)
- if (usCount == 0) /* 已经没有数据 */
- {
- return 0;
- }
- else
- {
- *_pByte = _pUart->pRxBuf[_pUart->usRxRead]; /* 从串口接收FIFO取1个数据 */
- /* 改写FIFO读索引 */
- DISABLE_INT();
- if (++_pUart->usRxRead >= _pUart->usRxBufSize)
- {
- _pUart->usRxRead = 0;
- }
- _pUart->usRxCount--;
- ENABLE_INT();
- return 1;
- }
- }
函数comGetChar是专门供用户调用的,用于从接收FIFO中读取1个数据。具体代码的实现也比较好理解,主要是接收FIFO的空间调整。
注意:由于函数UartGetChar做了static作用域限制,仅可在bsp_uart_fifo.c文件中调用。
30.3.7 串口printf实现
printf函数是标准c库函数。最原来的意思是打印输出到显示器。在单片机,我们常用它来打印调试信息到串口,通过计算机上运行的串口软件来监视程序的运行状态。
为什么要用printf函数,而不用串口发送的函数。因为printf函数的形参功能很强大,它支持各种数值转换。比如将整数、浮点数转换为字符串,支持整数左对齐、右对齐显示等。
我们设计的很多裸机例子都是用printf函数输出运行结果的。因为如果加上显示屏驱动后,会将程序搞的很复杂,显示部分的代码量超过了例程本身要演示的核心功能代码。用串口做输出,移植很方便,现在很少有不带串口的单片机。
实现printf输出到串口,只需要在工程中添加两个函数:
- /*
- *********************************************************************************************************
- * 函 数 名: fputc
- * 功能说明: 重定义putc函数,这样可以使用printf函数从串口1打印输出
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- int fputc(int ch, FILE *f)
- {
- #if 1 /* 将需要printf的字符通过串口中断FIFO发送出去,printf函数会立即返回 */
- comSendChar(COM1, ch);
-
- return ch;
- #else /* 采用阻塞方式发送每个字符,等待数据发送完毕 */
- /* 写一个字节到USART1 */
- USART1->TDR = ch;
-
- /* 等待发送结束 */
- while((USART1->ISR & USART_ISR_TC) == 0)
- {}
-
- return ch;
- #endif
- }
- /*
- *********************************************************************************************************
- * 函 数 名: fgetc
- * 功能说明: 重定义getc函数,这样可以使用getchar函数从串口1输入数据
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- int fgetc(FILE *f)
- {
- #if 1 /* 从串口接收FIFO中取1个数据, 只有取到数据才返回 */
- uint8_t ucData;
- while(comGetChar(COM1, &ucData) == 0);
- return ucData;
- #else
- /* 等待接收到数据 */
- while((USART1->ISR & USART_ISR_RXNE) == 0)
- {}
- return (int)USART1->RDR;
- #endif
- }
printf函数是非阻塞的,执行后会立即返回,串口中断服务程序会陆续将数据发送出去。
30.4 串口FIFO板级支持包(bsp_uart_fifo.c)
串口驱动文件bsp_uart_fifo.c主要实现了如下几个API供用户调用:
bsp_InitUart
comSendBuf
comSendChar
comGetChar
30.4.1 函数bsp_InitUart
函数原型:
void bsp_InitUart(void)
函数描述:
此函数主要用于串口的初始化,使用所有其它API之前,务必优先调用此函数。
使用举例:
串口的初始化函数在bsp.c文件的bsp_Init函数里面调用。
30.4.2 函数comSendBuf
函数原型:
void comSendBuf(COM_PORT_E _ucPort, uint8_t *_ucaBuf, uint16_t _usLen);
函数描述:
此函数用于向串口发送一组数据,非阻塞方式,数据放到发送缓冲区后立即返回,由中断服务程序在后台完成发送。
函数参数:
第1个参数_ucPort是端口号,范围COM1 - COM8。
第2个参数_ucaBuf是待发送的数据缓冲区地址。
第3个参数_usLen是要发送数据的字节数。
注意事项:
此函数的解读在本章30.3.5小节。
发送的数据最好不要超过bsp_uart_fifo.h文件中定义的发送缓冲区大小,从而实现最优的工作方式。因为超过后需要在发送函数等待有发送空间可用。
使用举例:
调用此函数前,务必优先调用函数bsp_InitUart进行初始化。
const char buf1[] = "接收到串口命令1\r\n";
comSendBuf(COM1, (uint8_t *)buf1, strlen(buf1));
30.4.3 函数comSendChar
函数原型:
void comSendChar(COM_PORT_E _ucPort, uint8_t _ucByte);
函数描述:
此函数用于向串口发送1个字节,非阻塞方式,数据放到发送缓冲区后立即返回,由中断服务程序在后台完成发送。此函数是通过调用函数comSendBuf实现的。
函数参数:
第1个参数_ucPort是端口号,范围COM1 - COM8。
第2个参数_ucByte是待发送的数据。
注意事项:
此函数的解读在本章30.3.2小节。
使用举例:
调用此函数前,务必优先调用函数bsp_InitUart进行初始化。
比如通过串口1发送一个字符c:comSendChar(COM1, 'c')。
30.4.4 函数comGetChar
函数原型:
uint8_t comGetChar(COM_PORT_E _ucPort, uint8_t *_pByte)
函数描述:
此函数用于从接收缓冲区读取1字节,非阻塞。无论有无数据均立即返回。
函数参数:
第1个参数_ucPort是端口号,范围COM1 - COM8。
第2个参数_pByte用于存放接收到的数据。
返回值,返回0表示无数据, 1 表示读取到有效字节。
注意事项:
此函数的解读在本章30.3.6小节。
使用举例:
调用此函数前,务必优先调用函数bsp_InitUart进行初始化。
比如从串口1读取一个字符就是:comGetChar(COM1, &read)。
30.5 串口FIFO驱动移植和使用
串口FIFO移植步骤如下:
第1步:复制bsp_uart_fifo.h和bsp_uart_fifo.c到自己的工程目录,并添加到工程里面。
第2步:根据自己要使用的串口和收发缓冲大小,修改下面的宏定义即可。
- #define UART1_FIFO_EN 1
- #define UART2_FIFO_EN 0
- #define UART3_FIFO_EN 0
- #define UART4_FIFO_EN 0
- #define UART5_FIFO_EN 0
- #define UART6_FIFO_EN 0
- #define UART7_FIFO_EN 0
- #define UART8_FIFO_EN 0
- /* 定义串口波特率和FIFO缓冲区大小,分为发送缓冲区和接收缓冲区, 支持全双工 */
- #if UART1_FIFO_EN == 1
- #define UART1_BAUD 115200
- #define UART1_TX_BUF_SIZE 1*1024
- #define UART1_RX_BUF_SIZE 1*1024
- #endif
- #if UART2_FIFO_EN == 1
- #define UART2_BAUD 9600
- #define UART2_TX_BUF_SIZE 10
- #define UART2_RX_BUF_SIZE 2*1024
- #endif
- #if UART3_FIFO_EN == 1
- #define UART3_BAUD 9600
- #define UART3_TX_BUF_SIZE 1*1024
- #define UART3_RX_BUF_SIZE 1*1024
- #endif
- #if UART4_FIFO_EN == 1
- #define UART4_BAUD 115200
- #define UART4_TX_BUF_SIZE 1*1024
- #define UART4_RX_BUF_SIZE 1*1024
- #endif
- #if UART5_FIFO_EN == 1
- #define UART5_BAUD 115200
- #define UART5_TX_BUF_SIZE 1*1024
- #define UART5_RX_BUF_SIZE 1*1024
- #endif
- #if UART6_FIFO_EN == 1
- #define UART6_BAUD 115200
- #define UART6_TX_BUF_SIZE 1*1024
- #define UART6_RX_BUF_SIZE 1*1024
- #endif
- #if UART7_FIFO_EN == 1
- #define UART7_BAUD 115200
- #define UART7_TX_BUF_SIZE 1*1024
- #define UART7_RX_BUF_SIZE 1*1024
- #endif
- #if UART8_FIFO_EN == 1
- #define UART8_BAUD 115200
- #define UART8_TX_BUF_SIZE 1*1024
- #define UART8_RX_BUF_SIZE 1*1024
- #endif
第3步:这几个驱动文件主要用到HAL库的GPIO和串口驱动文件,简单省事些可以添加所有HAL库.C源文件进来。
第4步,应用方法看本章节配套例子即可。
30.6 实验例程设计框架
通过程序设计框架,让大家先对配套例程有一个全面的认识,然后再理解细节,本次实验例程的设计框架如下:
第1阶段,上电启动阶段:
这部分在第14章进行了详细说明。
第2阶段,进入main函数:
第1部分,硬件初始化,主要是MPU,Cache,HAL库,系统时钟,滴答定时器和LED。
第2部分,应用程序设计部分,实现了一个串口接收命令,返回消息的简单功能。
30.7 实验例程说明(MDK)
配套例子:
V7-015_串口和PC机通信(驱动支持8串口FIFO)
实验目的:
学习串口与PC通信。
实验内容:
启动一个自动重装软件定时器,每100ms翻转一次LED2。
实验操作:
串口接收到字符命令'1',返回串口消息"接收到串口命令1"。
串口接收到字符命令'2',返回串口消息"接收到串口命令2"。
串口接收到字符命令'3',返回串口消息"接收到串口命令3"。
串口接收到字符命令'4',返回串口消息"接收到串口命令4"。
K1按键按下,串口打印"按键K1按下"。
K2按键按下,串口打印"按键K2按下"。
K3按键按下,串口打印"按键K3按下"。
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1

程序设计:
系统栈大小分配:

RAM空间用的DTCM:

硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
- /*
- *********************************************************************************************************
- * 函 数 名: bsp_Init
- * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次
- * 形 参:无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- void bsp_Init(void)
- {
- /* 配置MPU */
- MPU_Config();
-
- /* 使能L1 Cache */
- CPU_CACHE_Enable();
- /*
- STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟:
- - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。
- - 设置NVIV优先级分组为4。
- */
- HAL_Init();
- /*
- 配置系统时钟到400MHz
- - 切换使用HSE。
- - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。
- */
- SystemClock_Config();
- /*
- Event Recorder:
- - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。
- - 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章
- */
- #if Enable_EventRecorder == 1
- /* 初始化EventRecorder并开启 */
- EventRecorderInitialize(EventRecordAll, 1U);
- EventRecorderStart();
- #endif
-
- bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */
- bsp_InitTimer(); /* 初始化滴答定时器 */
- bsp_InitUart(); /* 初始化串口 */
- bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */
- bsp_InitLed(); /* 初始化LED */
- }
MPU配置和Cache配置:
数据Cache和指令Cache都开启。配置了AXI SRAM区(本例子未用到AXI SRAM)和FMC的扩展IO区。
- /*
- *********************************************************************************************************
- * 函 数 名: MPU_Config
- * 功能说明: 配置MPU
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void MPU_Config( void )
- {
- MPU_Region_InitTypeDef MPU_InitStruct;
- /* 禁止 MPU */
- HAL_MPU_Disable();
- /* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */
- MPU_InitStruct.Enable = MPU_REGION_ENABLE;
- MPU_InitStruct.BaseAddress = 0x24000000;
- MPU_InitStruct.Size = MPU_REGION_SIZE_512KB;
- MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
- MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
- MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
- MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
- MPU_InitStruct.Number = MPU_REGION_NUMBER0;
- MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1;
- MPU_InitStruct.SubRegionDisable = 0x00;
- MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
- HAL_MPU_ConfigRegion(&MPU_InitStruct);
-
-
- /* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */
- MPU_InitStruct.Enable = MPU_REGION_ENABLE;
- MPU_InitStruct.BaseAddress = 0x60000000;
- MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB;
- MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
- MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
- MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
- MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
- MPU_InitStruct.Number = MPU_REGION_NUMBER1;
- MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
- MPU_InitStruct.SubRegionDisable = 0x00;
- MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
-
- HAL_MPU_ConfigRegion(&MPU_InitStruct);
- /*使能 MPU */
- HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
- }
- /*
- *********************************************************************************************************
- * 函 数 名: CPU_CACHE_Enable
- * 功能说明: 使能L1 Cache
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void CPU_CACHE_Enable(void)
- {
- /* 使能 I-Cache */
- SCB_EnableICache();
- /* 使能 D-Cache */
- SCB_EnableDCache();
- }
每10ms调用一次蜂鸣器处理:
蜂鸣器处理是在滴答定时器中断里面实现,每10ms执行一次检测。
- /*
- *********************************************************************************************************
- * 函 数 名: bsp_RunPer10ms
- * 功能说明: 该函数每隔10ms被Systick中断调用1次。详见 bsp_timer.c的定时中断服务程序。一些处理时间要求
- * 不严格的任务可以放在此函数。比如:按键扫描、蜂鸣器鸣叫控制等。
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- void bsp_RunPer10ms(void)
- {
- bsp_KeyScan10ms();
- }
主功能:
主程序实现如下操作:
启动一个自动重装软件定时器,每100ms翻转一次LED2。
串口接收到字符命令'1',返回串口消息"接收到串口命令1"。
串口接收到字符命令'2',返回串口消息"接收到串口命令2"。
串口接收到字符命令'3',返回串口消息"接收到串口命令3"。
串口接收到字符命令'4',返回串口消息"接收到串口命令4"。
K1按键按下,串口打印"按键K1按下"。
K2按键按下,串口打印"按键K2按下"。
K3按键按下,串口打印"按键K3按下"。
- /*
- *********************************************************************************************************
- * 函 数 名: main
- * 功能说明: c程序入口
- * 形 参: 无
- * 返 回 值: 错误代码(无需处理)
- *********************************************************************************************************
- */
- int main(void)
- {
- uint8_t ucKeyCode;
- uint8_t read;
- const char buf1[] = "接收到串口命令1\r\n";
- const char buf2[] = "接收到串口命令2\r\n";
- const char buf3[] = "接收到串口命令3\r\n";
- const char buf4[] = "接收到串口命令4\r\n";
-
-
- bsp_Init(); /* 硬件初始化 */
-
- PrintfLogo(); /* 打印例程名称和版本等信息 */
- PrintfHelp(); /* 打印操作提示 */
- bsp_StartAutoTimer(0, 100); /* 启动1个100ms的自动重装的定时器 */
-
- /* 主程序大循环 */
- while (1)
- {
- /* CPU空闲时执行的函数,在 bsp.c */
- bsp_Idle();
-
- /* 判断定时器超时时间 */
- if (bsp_CheckTimer(0))
- {
- /* 每隔100ms 进来一次 */
- /* 翻转LED2的状态 */
- bsp_LedToggle(2);
- }
-
- /* 接收到的串口命令处理 */
- if (comGetChar(COM1, &read))
- {
- switch (read)
- {
- case '1':
- comSendBuf(COM1, (uint8_t *)buf1, strlen(buf1));
- break;
- case '2':
- comSendBuf(COM1, (uint8_t *)buf2, strlen(buf2));
- break;
- case '3':
- comSendBuf(COM1, (uint8_t *)buf3, strlen(buf3));
- break;
- case '4':
- comSendBuf(COM1, (uint8_t *)buf4, strlen(buf4));
- break;
-
- default:
- break;
- }
- }
-
- /* 处理按键事件 */
- ucKeyCode = bsp_GetKey();
- if (ucKeyCode > 0)
- {
- /* 有键按下 */
- switch (ucKeyCode)
- {
- case KEY_DOWN_K1: /* 按键K1键按下 */
- printf("按键K1按下\r\n");
- bsp_LedToggle(1);
- break;
-
- case KEY_DOWN_K2: /* 按键K2键按下 */
- printf("按键K2按下\r\n");
- bsp_LedToggle(3);
- break;
- case KEY_DOWN_K3: /* 按键K3键按下 */
- printf("按键K3按下\r\n");
- bsp_LedToggle(4);
- break;
-
- default:
- break;
- }
- }
- }
- }
30.8 实验例程说明(IAR)
配套例子:
V7-015_串口和PC机通信(驱动支持8串口FIFO)
实验目的:
学习串口与PC通信。
实验内容:
启动一个自动重装软件定时器,每100ms翻转一次LED2。
实验操作:
串口接收到字符命令'1',返回串口消息"接收到串口命令1"。
串口接收到字符命令'2',返回串口消息"接收到串口命令2"。
串口接收到字符命令'3',返回串口消息"接收到串口命令3"。
串口接收到字符命令'4',返回串口消息"接收到串口命令4"。
K1按键按下,串口打印"按键K1按下"。
K2按键按下,串口打印"按键K2按下"。
K3按键按下,串口打印"按键K3按下"。
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1

程序设计:
系统栈大小分配:

RAM空间用的DTCM:

硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
- /*
- *********************************************************************************************************
- * 函 数 名: bsp_Init
- * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次
- * 形 参:无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- void bsp_Init(void)
- {
- /* 配置MPU */
- MPU_Config();
-
- /* 使能L1 Cache */
- CPU_CACHE_Enable();
- /*
- STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟:
- - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。
- - 设置NVIV优先级分组为4。
- */
- HAL_Init();
- /*
- 配置系统时钟到400MHz
- - 切换使用HSE。
- - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。
- */
- SystemClock_Config();
- /*
- Event Recorder:
- - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。
- - 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章
- */
- #if Enable_EventRecorder == 1
- /* 初始化EventRecorder并开启 */
- EventRecorderInitialize(EventRecordAll, 1U);
- EventRecorderStart();
- #endif
-
- bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */
- bsp_InitTimer(); /* 初始化滴答定时器 */
- bsp_InitUart(); /* 初始化串口 */
- bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */
- bsp_InitLed(); /* 初始化LED */
- }
MPU配置和Cache配置:
数据Cache和指令Cache都开启。配置了AXI SRAM区(本例子未用到AXI SRAM)和FMC的扩展IO区。
- /*
- *********************************************************************************************************
- * 函 数 名: MPU_Config
- * 功能说明: 配置MPU
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void MPU_Config( void )
- {
- MPU_Region_InitTypeDef MPU_InitStruct;
- /* 禁止 MPU */
- HAL_MPU_Disable();
- /* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */
- MPU_InitStruct.Enable = MPU_REGION_ENABLE;
- MPU_InitStruct.BaseAddress = 0x24000000;
- MPU_InitStruct.Size = MPU_REGION_SIZE_512KB;
- MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
- MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
- MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
- MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
- MPU_InitStruct.Number = MPU_REGION_NUMBER0;
- MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1;
- MPU_InitStruct.SubRegionDisable = 0x00;
- MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
- HAL_MPU_ConfigRegion(&MPU_InitStruct);
-
-
- /* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */
- MPU_InitStruct.Enable = MPU_REGION_ENABLE;
- MPU_InitStruct.BaseAddress = 0x60000000;
- MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB;
- MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
- MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
- MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
- MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
- MPU_InitStruct.Number = MPU_REGION_NUMBER1;
- MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
- MPU_InitStruct.SubRegionDisable = 0x00;
- MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
-
- HAL_MPU_ConfigRegion(&MPU_InitStruct);
- /*使能 MPU */
- HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
- }
- /*
- *********************************************************************************************************
- * 函 数 名: CPU_CACHE_Enable
- * 功能说明: 使能L1 Cache
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void CPU_CACHE_Enable(void)
- {
- /* 使能 I-Cache */
- SCB_EnableICache();
- /* 使能 D-Cache */
- SCB_EnableDCache();
- }
- 每10ms调用一次蜂鸣器处理:
- 蜂鸣器处理是在滴答定时器中断里面实现,每10ms执行一次检测。
- /*
- *********************************************************************************************************
- * 函 数 名: bsp_RunPer10ms
- * 功能说明: 该函数每隔10ms被Systick中断调用1次。详见 bsp_timer.c的定时中断服务程序。一些处理时间要求
- * 不严格的任务可以放在此函数。比如:按键扫描、蜂鸣器鸣叫控制等。
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- void bsp_RunPer10ms(void)
- {
- bsp_KeyScan10ms();
- }
主功能:
主程序实现如下操作:
启动一个自动重装软件定时器,每100ms翻转一次LED2。
串口接收到字符命令'1',返回串口消息"接收到串口命令1"。
串口接收到字符命令'2',返回串口消息"接收到串口命令2"。
串口接收到字符命令'3',返回串口消息"接收到串口命令3"。
串口接收到字符命令'4',返回串口消息"接收到串口命令4"。
K1按键按下,串口打印"按键K1按下"。
K2按键按下,串口打印"按键K2按下"。
K3按键按下,串口打印"按键K3按下"。
- /*
- *********************************************************************************************************
- * 函 数 名: main
- * 功能说明: c程序入口
- * 形 参: 无
- * 返 回 值: 错误代码(无需处理)
- *********************************************************************************************************
- */
- int main(void)
- {
- uint8_t ucKeyCode;
- uint8_t read;
- const char buf1[] = "接收到串口命令1\r\n";
- const char buf2[] = "接收到串口命令2\r\n";
- const char buf3[] = "接收到串口命令3\r\n";
- const char buf4[] = "接收到串口命令4\r\n";
-
-
- bsp_Init(); /* 硬件初始化 */
-
- PrintfLogo(); /* 打印例程名称和版本等信息 */
- PrintfHelp(); /* 打印操作提示 */
- bsp_StartAutoTimer(0, 100); /* 启动1个100ms的自动重装的定时器 */
-
- /* 主程序大循环 */
- while (1)
- {
- /* CPU空闲时执行的函数,在 bsp.c */
- bsp_Idle();
-
- /* 判断定时器超时时间 */
- if (bsp_CheckTimer(0))
- {
- /* 每隔100ms 进来一次 */
- /* 翻转LED2的状态 */
- bsp_LedToggle(2);
- }
-
- /* 接收到的串口命令处理 */
- if (comGetChar(COM1, &read))
- {
- switch (read)
- {
- case '1':
- comSendBuf(COM1, (uint8_t *)buf1, strlen(buf1));
- break;
- case '2':
- comSendBuf(COM1, (uint8_t *)buf2, strlen(buf2));
- break;
- case '3':
- comSendBuf(COM1, (uint8_t *)buf3, strlen(buf3));
- break;
- case '4':
- comSendBuf(COM1, (uint8_t *)buf4, strlen(buf4));
- break;
-
- default:
- break;
- }
- }
-
- /* 处理按键事件 */
- ucKeyCode = bsp_GetKey();
- if (ucKeyCode > 0)
- {
- /* 有键按下 */
- switch (ucKeyCode)
- {
- case KEY_DOWN_K1: /* 按键K1键按下 */
- printf("按键K1按下\r\n");
- bsp_LedToggle(1);
- break;
-
- case KEY_DOWN_K2: /* 按键K2键按下 */
- printf("按键K2按下\r\n");
- bsp_LedToggle(3);
- break;
- case KEY_DOWN_K3: /* 按键K3键按下 */
- printf("按键K3按下\r\n");
- bsp_LedToggle(4);
- break;
-
- default:
- break;
- }
- }
- }
- }
30.9 总结
本章节就为大家讲解这么多, 重点是8串口FIFO的实现,而且移植也比较简单,可放心用于项目实战。
|
.png) STMCU小助手
发布时间:2021-12-22 11:47
STMCU小助手
发布时间:2021-12-22 11:47





 微信公众号
微信公众号
 手机版
手机版