1.使用keil5的注意事项
2 d& r" t9 M" y/ n8 s( V! Q用STM32Cube生成程序驱动后 将程序写到以下范围内,以程序保证用STM32Cube重新生成工程后不被删除 。
6 H7 [. i s$ Y& k- /* USER CODE BEGIN 1 */ //代码开始
5 b, H f' [+ w9 g4 x8 f( p - $ L0 D6 V" I# g8 e3 T( }
- /* USER CODE END 1 */ //代码结束
2.HAL库延时函数
' y4 e! l3 l3 j# x1、HAL库自带延时函数(毫秒,阻塞)
) Z5 R: H+ B# I7 D- HAL_Delay(x); z: W% S1 T0 ?' ]
- 实际延时时间为(x+1)ms
( h O" X8 B! C) T8 R9 z7 W( h& aHAL库函数为了防止无意义延时(即0ms延时)的产生,在HAL_Delay函数传入参数之后会对参数加1。 如果使用HAL库默认延时函数进行延时,实际延时时间将会比预期时间多1ms。换句话说,HAL_Delay函数至少会产生1ms的延时。
* P5 t; n% W. g+ t9 Z! @9 h* X) C: }1 F" [
2、重新定义延时函数,非阻塞式延时
7 k" G% F2 e6 G# @8 j- void Delay_us(int16_t nus)
2 Z& P \; q' v0 g+ w' g! F - {
5 s2 \1 x+ G Y2 j - int32_t temp; ' T. @$ m& b% T0 V3 J5 Y
- SysTick->LOAD = nus*9; //72MHz
$ R7 w& F" N( } - SysTick->VAL=0X00;
' F3 x4 w* N) A2 } - SysTick->CTRL=0X01;
* M" k7 q+ F! @. Z - do
) f( w2 U/ n9 ]. m8 ?! O7 p - {
. T1 s- j. G- }/ u* ]+ `7 F0 G - temp=SysTick->CTRL;
% {' n) {; J- `; O: r4 `5 A. I: B - }, H& j- w$ @" H% I: V0 p6 f, W5 M
- while((temp&0x01)&&(!(temp&(1<<16))));1 y7 r9 y! S" q5 } n! B7 M1 S
- ! W$ M4 r8 H1 B! d, o: G0 D
- SysTick->CTRL=0x00;
5 f% Y3 n6 I; b; I) X - SysTick->VAL =0X00;
8 P* _/ I! K* U* k% h - }
$ Z/ T6 C# e* X( _) ^
8 q- |6 N3 o/ n2 k3.HAL库配置GPIO
8 q5 v% K3 @6 A+ c7 q$ C' v5 l- void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init);) P) ], K) k" |5 t
- void HAL_GPIO_DeInit(GPIO_TypeDef *GPIOx, uint32_t GPIO_Pin);8 k9 P1 y- W! N9 _
- GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin); //端口输入读取函数
9 Y1 @# R$ _; m* e - void HAL_GPIO_WritePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState); //端口输出控制函数" g0 |, g& v/ r7 O, y H
- void HAL_GPIO_TogglePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin); //端口输出翻转函数
5 O4 m/ K4 s; q! w& x) t - HAL_StatusTypeDef HAL_GPIO_LockPin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin);. z0 d% f$ ^2 z" T3 j3 k
- void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin);* h; L( |4 W2 L" {) r( y. R8 m1 p
- void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin);
解释:5 `/ l( ^3 N. p5 x; M# e8 Q5 A2 w/ T
6 S- f* S$ w. c, V, r/ K- c' a. w
HAL_GPIO_Init
+ i: K w6 @8 @ P9 a1 ^初始化我们需要用到的引脚的工作模式,包括具体引脚的工作速度、是否复用模式、上下拉等等参数。: W C0 }7 a8 m Q' l" T
- void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init)
+ z/ ^. `# Y2 l' S) M+ lHAL_GPIO_DeInit2 G w8 U1 W4 ~& c" ^) t
将初始化之后的引脚恢复成默认的状态–各个寄存器复位时的值* J4 v8 U& n' R% F/ P# f4 c' u
- void HAL_GPIO_DeInit(GPIO_TypeDef *GPIOx, uint32_t GPIO_Pin)
. w3 C9 x3 r$ o% K: W# P N B' U - 例:HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10);
HAL_GPIO_ReadPin; A/ P. l( J6 n% J
读取我们想要知道的引脚的电平状态、函数返回值为0或1。
. Z7 J. ]( Q7 v, A2 y- GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
" J/ M5 S( A$ z: w) b! c - 例:pin_State = HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_9);
; O& ^7 q/ U, u! mHAL_GPIO_WritePin1 b. {6 w2 x V
给某个引脚写0或1,但是不要理解成,写1就是使能之类的意思,有些寄存器写1是擦除的意思# n8 x8 f( z/ L! s" h6 S J
- void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState)7 S8 b) }0 D+ q, M: b/ Z0 F* Y5 m
- 例:HAL_GPIO_WritePin(GPIOF, GPIO_PIN_9,GPIO_PIN_RESET)
HAL_GPIO_TogglePin
5 h8 r2 N4 S! M; Z, A7 f翻转某个引脚的电平状态
7 ~* n. o3 X) ]$ l B* ]. a- W$ C' o; i- void HAL_GPIO_TogglePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
$ r( S$ u! R1 A, y - 例:HAL_GPIO_TogglePin(GPIOF, GPIO_PIN_9);
HAL_GPIO_LockPin! G8 F: E" |; @2 G6 o Z
如果一个管脚的当前状态是1,读管脚值使用锁定,当这个管脚电平变化时保持锁定时的值,直到重置才改变
7 V0 d# J3 `* k. G& ]3 p4 I- HAL_StatusTypeDef HAL_GPIO_LockPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)$ x. e( f. T8 X3 [) u4 O F
- 例:, \7 H% ?8 I% j! i y% R# O
- HAL_StatusTypeDef hal_State;
' w5 S7 x- F- X' L2 F - hal_State = HAL_GPIO_LockPin(GPIOF, GPIO_PIN_9);
5 `" [( Y. |0 X( O+ e& ^
! p- G3 F/ }7 w2 b1 o- i
HAL_GPIO_EXTI_IRQHandler
5 d) g/ a3 y$ O' m, e这个函数是外部中断服务函数,用来响应外部中断的触发,函数实体里面有两个功能,1是清除中断标记位,2是调用下面要介绍的回调函数。实际调用的是下边的中断回调函数
/ T" v9 A& `* s& U- void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin)
) A( P+ s4 q# b, T+ T8 { - 例:HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_3);
$ U3 X) Q. B1 y l3 U8 \HAL_GPIO_EXTI_Callback
l6 Z/ t5 y1 o$ Q% K6 ~0 D中断回调函数,可以理解为中断函数具体要响应的动作。
. M3 C& ^2 B! Q2 D# \9 }4 c- void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
3 g2 B; Z( y& [5 N H, | - 例:HAL_GPIO_EXTI_Callback(GPIO_Pin);
, [2 \7 W& r( e( H" @; Y: L; V4.LED工程
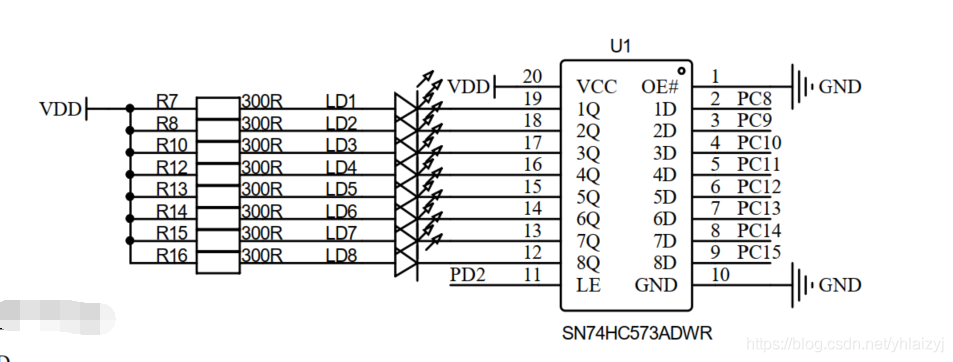
. U# ^9 U4 n5 I/ R1.LED电路原理图6 m) R& q$ k1 s5 z$ T
- n9 d0 B: `4 D% S3 F; [
2 l' s1 K: J6 w
% N3 x( u7 ~2 Z8 V$ R# Q
2.GPIO_PIN_SET与GPIO_PIN_RESET
2 q R9 ?+ D$ z+ j/ J0 g( o. m" g6 s3 v/ k$ ?1 b1 W
- void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState)/ o9 F' n. W1 n0 y; @. X0 }, y2 B
- {1 q6 M# z0 f, j% X6 O
- /* Check the parameters */
* X [4 Z2 b& q) p - assert_param(IS_GPIO_PIN(GPIO_Pin));& u: p+ U6 Y4 F0 s z% Q
- assert_param(IS_GPIO_PIN_ACTION(PinState));
: i& V) O0 ]* d7 L* `7 F1 G - 2 l* i. V, y6 R& M, r& [
- if (PinState != GPIO_PIN_RESET)
& O" M- L+ e2 s' o( m) k - {, M+ M( W8 d" E+ U. ?
- GPIOx->BSRR = (uint32_t)GPIO_Pin;//如果是GPIO_PIN_SET,则将GPIO的BSRR寄存器低16位置为GPIO_Pin% M5 U& z# Q/ b% M2 s6 u* F' C
- }& q5 q e4 }; I! j3 X
- else
% [: |( O" w2 `+ p2 U0 |6 X. C/ S - {
. j, c, Y2 _, F+ x - GPIOx->BSRR = (uint32_t)GPIO_Pin << 16 ;//如果是GPIO_PIN_RESET,则将GPIO的BSRR寄存器的高16位置为GPIO_Pin
% {2 v# O- ~5 j4 `& l( p1 T - }" j# c* [! \* Y* t7 t4 K# s
- }
例如函数输入的参数是GPIOA、GPIO_Pin_1和GPIO_PIN_SET,则GPIOA->BSRR=((uint32_t)0x0002U);即把二进制0000000000000010转换为32位数赋值给BSRR,对应的GPIO_Pin_1管脚置高;* z$ S6 e! d, \9 n, ?4 H- U4 i
. G0 S5 W; B# N
例如函数输入的参数是GPIOA、GPIO_Pin_1和GPIO_PIN_RESET,则GPIOA->BSRR=((uint32_t)0x0002U<<16);即把二进制数0000000000000010左移16位并转换为32位数赋值给BSRR,高16位对应的GPIO_Pin_1为1,对应管脚被清零,置低;2 |3 n6 M( T2 B, M3 ^/ t8 a& y! b [
6 ~+ X9 Q/ D/ v+ P' ^3.锁存器- { l5 g7 u1 u+ t6 ^ m- a5 {3 K
锁存使能(LE)输入和输出使能(OE)输入对于所有锁存器是公共的。. ^: c, \! u5 l- C7 T& h( n' Y
5 v( r7 p8 P- U* k3 N6 Z3 K. b
LE为高电平时,Dn输入端的数据进入锁存器。 在这种情况下,锁存器是透明的,即每当其对应的D输入改变时,锁存器输出就改变状态;
L9 K: n7 ?4 v/ ~5 F( n& n当LE为低电平时,锁存器将存在于D输入端的信息存储在LE的高电平至低电平转换之前的建立时间;
" c5 S1 Q& y7 ~+ w当OE为低电平时,8个锁存器的内容在输出端可用;/ i: @9 `3 x+ |. }
当OE为高电平时,输出变为高阻态关闭状态。OE输入的操作不会影响锁存器的状态。0 T% s$ K- s3 Y) o3 v
4.用端口输出控制函数控制LED闪烁) d( J5 L! d. P: ^0 g
/ u6 z& E/ e3 R! @! }# w+ g
- HAL_GPIO_WritePin(GPIOC,GPIO_PIN_8,GPIO_PIN_SET); //端口输出控制函数,PC8端口输出高电平,使LD1熄灭$ w( L0 t0 ?5 v/ o' Q! F
- HAL_Delay(300);7 Z: G2 H. |+ @
- HAL_GPIO_WritePin(GPIOC,GPIO_PIN_8,GPIO_PIN_RESET); 3 ?& O0 ~3 ~1 j2 {5 b
- HAL_Delay(300);
5 S4 T- |( S6 d _. x/ l5.用端口输出翻转函数控制LED闪烁# _! D9 t+ D, p& w, T+ z" K+ m+ c4 x) a
- HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_8); //端口输出翻转函数 , H: y ]' j. T: D r3 G
- HAL_Delay(300);
6.使用锁存器- HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET); //锁存器输出高电平
( K$ A" I% [6 V - HAL_GPIO_TogglePin(GPIOC,LD1_Pin); //端口输出翻转函数
5 H" n+ o( A7 h- h - HAL_Delay(300);
& a, f2 ^$ W* |2 }& @ - HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET); //锁存器输出低电平
7.LED跑马灯, _7 I! { M \* d6 G4 F8 p; {
7 c( u2 q% I( W( O5 d' m' J( T
- #define DELAY_TIME 100
! \$ F7 ?0 [4 i - void LED_test(void)
3 }$ b' g0 R$ h0 k- w1 {5 Z - {
s- }( J* Z9 { N. G! B - HAL_GPIO_TogglePin(GPIOC, LD1_Pin);1 y/ z$ S# _1 w* M$ \( N8 F B
- HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);: \7 L. h, x0 y' [* s" b7 ?2 d
- HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
/ o3 q0 H8 O$ }& {' a- |( @0 z - HAL_Delay(DELAY_TIME);
' m4 m, c4 R1 t- [+ e" n1 N- y - ! M% D$ g" I2 h7 G4 w e
- HAL_GPIO_TogglePin(GPIOC, LD2_Pin);
; _! p. F7 Y0 T s8 w - HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);2 ` W! a9 o9 f r8 k$ o
- HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
9 }, u5 v, Z# w1 J3 Z - HAL_Delay(DELAY_TIME);; b+ z+ h5 i, c9 A3 Z9 r$ `% f
- & G" N; U- y: V" M6 V6 ]
- HAL_GPIO_TogglePin(GPIOC, LD3_Pin);
- X. h8 f& m# @0 \ - HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);. d, I; K! P/ l! o( X: h s( Q- D, }1 P5 n
- HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);% R' `5 G/ s4 u0 i8 |) r
- HAL_Delay(DELAY_TIME);
7 H3 [ B' p8 ~! `: y8 H -
, A4 K H+ g m) c0 ~- [/ g$ V - HAL_GPIO_TogglePin(GPIOC, LD4_Pin);1 T. M+ o R+ u# a! i
- HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);! d: S1 J+ I. P3 _2 p& C; @
- HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);' ^8 Z# ^& {( {1 I
- HAL_Delay(DELAY_TIME);: n0 O5 C( N. p- n$ F+ V* d
- $ r" @- d/ i S& s$ o# ^# K
- HAL_GPIO_TogglePin(GPIOC, LD5_Pin);
5 z$ r& v) y) A: b - HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);7 S8 H) G# d6 }$ P! Q
- HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);4 L) {" S& q$ o$ u$ V7 a, e1 Q
- HAL_Delay(DELAY_TIME);, _6 e- w, A: M* y/ e
-
6 W& n2 C- z b+ l) y" } - HAL_GPIO_TogglePin(GPIOC, LD6_Pin);
' L/ |0 |1 d0 x - HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);, [$ N6 s5 B! v/ q- O4 ]
- HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);0 Y0 B' J9 Q, N; Y6 L- n" \
- HAL_Delay(DELAY_TIME);- d4 |5 |/ T% V( J, L! x: |
-
2 q! b/ z- Z6 D- M K - HAL_GPIO_TogglePin(GPIOC, LD7_Pin);! O3 _7 Y2 _- P% @- i) A! m) S; {
- HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);. y$ T$ G5 p. p* I/ Y9 [9 S* Q
- HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);0 y% ]6 n7 A6 r
- HAL_Delay(DELAY_TIME);
5 ]8 D, @/ _' K) B( ^ - # d5 k3 ]6 ?3 C2 l; D3 Z
- HAL_GPIO_TogglePin(GPIOC, LD8_Pin);
7 R D, ~% e1 I+ w" q6 J2 [/ r - HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
9 n5 v$ n5 a/ c) |5 F/ p5 e8 K# @9 N - HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);, G* Y- Y2 o+ J* A, k
- HAL_Delay(DELAY_TIME);
( q1 _ K, P! c- J' ^3 p - }
( n3 k6 L( p, ?4 i9 V; t; m - + J) W& h2 q2 j0 e4 N3 e- S5 S
+ S0 |6 H. _" K7 X" b
|
.png) STMCU小助手
发布时间:2021-12-8 22:00
STMCU小助手
发布时间:2021-12-8 22:00