48.1 初学者重要提示
学习本章节前,务必优先学习第47章,需要对FMC的基础知识和HAL库的几个常用API有个认识。
为什么要做IO扩展,不是已经用了240脚的H743XIH6吗?因为开发板使用了32位SDRAM和RGB888硬件接口,消耗IO巨大,所以必须得扩展了。
扩展的32路高速IO非常实用,且使用简单,只需初始下FMC,32路IO就可以随意使用了。当前的扩展方式只支持高速输出。
FMC总线扩展32路高速IO理解成GPIO的ODR寄存器就很简单了,其实就是一个东西。
FMC扩展IO是对地址0x60001000的32bit数据空间的0和1的操作。GPIOA的ODR寄存器是对地址 0x40000000 + 0x18020000 + 0x14 空间的操作。但只能操作16个引脚。
使用总线的优势就在这里了,相当于在GPIOA到GPIOK的基础上,又扩展出GPIOL和GPIOM。
- #define PERIPH_BASE ((uint32_t)0x40000000)
- #define D3_AHB1PERIPH_BASE (PERIPH_BASE + 0x18020000)
- #define GPIOA_BASE (D3_AHB1PERIPH_BASE + 0x0000)
- #define GPIOA ((GPIO_TypeDef *) GPIOA_BASE)
- typedef struct
- {
- __IO uint32_t MODER; /*!< GPIO port mode register, Address offset: 0x00 */
- __IO uint32_t OTYPER; /*!< GPIO port output type register, Address offset: 0x04 */
- __IO uint32_t OSPEEDR; /*!< GPIO port output speed register, Address offset: 0x08 */
- __IO uint32_t PUPDR; /*!< GPIO port pull-up/pull-down register, Address offset: 0x0C */
- __IO uint32_t IDR; /*!< GPIO port input data register, Address offset: 0x10 */
- __IO uint32_t ODR; /*!< GPIO port output data register, Address offset: 0x14 */
- __IO uint16_t BSRRL; /*!< GPIO port bit set/reset low register, Address offset: 0x18 */
- __IO uint16_t BSRRH; /*!< GPIO port bit set/reset high register, Address offset: 0x1A */
- __IO uint32_t LCKR; /*!< GPIO port configuration lock register, Address offset: 0x1C */
- __IO uint32_t AFR[2]; /*!< GPIO alternate function registers, Address offset: 0x20-0x24 */
- } GPIO_TypeDef;
48.2 FMC扩展IO硬件设计
扩展IO涉及到的知识点稍多,下面逐一为大家做个说明。
48.2.1 第1步,先来看FMC的块区分配
注,这个知识点在前面第47章的2.3小节有详细说明。
FMC总线可操作的地址范围0x60000000到0xDFFFFFFF,具体的框图如下:
从上面的框图可以看出,NOR/PSRAM/SRAM块区有4个片选NE1,NE2,NE3和NE4,但由于引脚复用,部分片选对应的引脚要用于其他功能,而且要控制的总线外设较多,导致片选不够用。因此需要增加译码器。
48.2.2 第2步,增加译码器及其地址计算
有了前面的认识之后再来看下面的译码器电路:
SN74LVC1G139APWR是双2-4线地址译码器,也就是带了两个译码器。原理图上仅用了一个。下面是139的真值表和引脚功能:
通过上面的原理图和真值表就比较好理解了,真值表的输出是由片选FMC_NE1和地址线FMC_A10、FMC_A11控制。
FMC_NE1 输出低电平:
FMC_A11(B),FMC_A10(A) = 00时,1Y0输出的低电平,选择的是OLED。
FMC_A11(B),FMC_A10(A) = 01时,1Y1输出的低电平,选择的是74HC574。
FMC_A11(B),FMC_A10(A) = 10时,1Y2输出的低电平,选择的是DM9000。
FMC_A11(B),FMC_A10(A) = 11时,1Y3输出的低电平,选择的是AD7606。
然后我们再计算译码器的地址,注意,这里地址的计算都是按照FMC的32bit访问模式计算的,因为我们的V7程序中是将NE1对应的FMC配置为32bit模式了。
具体FMC的32bit访问模式,16bit访问模式和8bit访问模式的区别在第47章的2.4小节有详细讲解。
32bit模式下,我们计算A10和A11的时候,实际上需要按HADDR12和HADDR13计算的。
如果来算NE1 + HADDR12 + HADDR13的四种组合地址就是如下:
NE1 + HADDR13 + HADDR12 = 0x6000000 + 0<<13 + 0<<12 = 0x60000000
NE1 + HADDR13 + HADDR12 = 0x6000000 + 0<<13 + 1<<12 = 0x60001000
NE1 + HADDR13 + HADDR12 = 0x6000000 + 1<<13 + 0<<12 = 0x60002000
NE1 + HADDR13 + HADDR12 = 0x6000000 + 1<<13 + 1<<12 = 0x60003000
这样一来,原理图里面给的地址就对应上了。同理如果配置为16位模式和8位模式,大家应该也都会计算了。
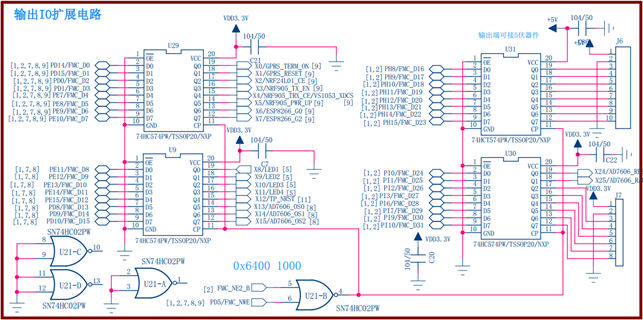
48.2.3 第3步,FMC的IO扩展部分
先来看下IO扩展的原理图实现,如果不太了解FMC的通信时序和数字逻辑芯片的使用,可能会比较懵,下面逐一为大家说明。
有了这个原理图,首先要做的就是了解74HC574和SN74HC02的功能。
74HC574是一款8位三态D触发器,起到锁存的功能,上升沿触发,对应的真值表如下(L表示低电平,H表示高电平,Z表示高阻):
SN74HC02是一款2输入或非门,一个芯片带了四组或非门,对应的真值表如下(L表示低电平,H表示高电平):
有了这个认识后,我们再来看FMC的配置,V7开发板的BSP驱动包里面专门做了一个IO扩展的FMC配置,即文件bsp_fmc_io.c,配置方式是FMC_AccessMode_A,这种模式对应的写时序是:
那么问题来了,我们要实现的功能是通过FMC输出的数据要锁存在扩展IO的输出端,否则FMC时序信号消失了,扩展IO的输出数据也消失了,就起不到控制作用了。所以就用到74HC574的锁存功能,而锁存的实现需要一个上升沿触发,这个上升沿就是通过74HC02输出的。
再结合上面FMC写时序图,在NE片选为低电平,NWE写使能信号为高电平期间,即地址建立时间段ADDSET内,74HC02是输出的低电平。
进入到DATAST数据建立阶段,在NE片选为低电平,NWE写使能信号也为低电平时,74HC02输出高电平,正好是实现1个上升沿的变化,将数据总线上的数据锁存到74HC574的输出端了。这里隐含了一个知识点,数据还没有完全建立起来就锁存是不是会有问题。在下面的3.3小节配置具体时序参数时再为大家说明。
48.2.4 第4步,举例扩展IO驱动LED应用
进行到这里,再回过头来看LED驱动就比较好理解了。操作LED的亮灭就是操作FMC的数据引脚D8,D9,D10和D11。
对地址0x64001000发送数据就可以了,但是如何对这个地址发送数据呢? 反映到C语言的实现上就是通过固定地址的指针变量(跟我们操作寄存器是一样的),即
#define HC574_PORT *(uint32_t *)0x64001000
如果要点亮LED1(低电平点亮),就是 HC574_PORT = 0x0000 0000。
如果要熄灭LED1就是HC574_PORT = 0x0000 0100,即操作FMC_D8的高低电平即可。
48.3 FMC扩展IO驱动设计
下面将程序设计中的相关问题逐一为大家做个说明。
48.3.1 FMC扩展IO所涉及到的GPIO配置
这里仅需把用到的GPIO时钟、FMC时钟、GPIO引脚和复用配置好即可:
- /*
- *********************************************************************************************************
- * 函 数 名: HC574_ConfigGPIO
- * 功能说明: 配置GPIO,FMC管脚设置为复用功能
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void HC574_ConfigGPIO(void)
- {
- /*
- 安富莱STM32-H7开发板接线方法:4片74HC574挂在FMC 32位总线上。1个地址端口可以扩展出32个IO
- PD0/FMC_D2
- PD1/FMC_D3
- PD4/FMC_NOE ---- 读控制信号,OE = Output Enable , N 表示低有效
- PD5/FMC_NWE -XX- 写控制信号,AD7606 只有读,无写信号
- PD8/FMC_D13
- PD9/FMC_D14
- PD10/FMC_D15
- PD14/FMC_D0
- PD15/FMC_D1
- PE7/FMC_D4
- PE8/FMC_D5
- PE9/FMC_D6
- PE10/FMC_D7
- PE11/FMC_D8
- PE12/FMC_D9
- PE13/FMC_D10
- PE14/FMC_D11
- PE15/FMC_D12
- PG0/FMC_A10 --- 和主片选FMC_NE2一起译码
- PG1/FMC_A11 --- 和主片选FMC_NE2一起译码
- XX --- PG9/FMC_NE2 --- 主片选(OLED, 74HC574, DM9000, AD7606)
- --- PD7/FMC_NE1 --- 主片选(OLED, 74HC574, DM9000, AD7606)
- +-------------------+------------------+
- + 32-bits Mode: D31-D16 +
- +-------------------+------------------+
- | PH8 <-> FMC_D16 | PI0 <-> FMC_D24 |
- | PH9 <-> FMC_D17 | PI1 <-> FMC_D25 |
- | PH10 <-> FMC_D18 | PI2 <-> FMC_D26 |
- | PH11 <-> FMC_D19 | PI3 <-> FMC_D27 |
- | PH12 <-> FMC_D20 | PI6 <-> FMC_D28 |
- | PH13 <-> FMC_D21 | PI7 <-> FMC_D29 |
- | PH14 <-> FMC_D22 | PI9 <-> FMC_D30 |
- | PH15 <-> FMC_D23 | PI10 <-> FMC_D31 |
- +------------------+-------------------+
- */
- GPIO_InitTypeDef gpio_init_structure;
- /* 使能 GPIO时钟 */
- __HAL_RCC_GPIOD_CLK_ENABLE();
- __HAL_RCC_GPIOE_CLK_ENABLE();
- __HAL_RCC_GPIOG_CLK_ENABLE();
- __HAL_RCC_GPIOH_CLK_ENABLE();
- __HAL_RCC_GPIOI_CLK_ENABLE();
- /* 使能FMC时钟 */
- __HAL_RCC_FMC_CLK_ENABLE();
- /* 设置 GPIOD 相关的IO为复用推挽输出 */
- gpio_init_structure.Mode = GPIO_MODE_AF_PP;
- gpio_init_structure.Pull = GPIO_PULLUP;
- gpio_init_structure.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
- gpio_init_structure.Alternate = GPIO_AF12_FMC;
- /* 配置GPIOD */
- gpio_init_structure.Pin = GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_4 | GPIO_PIN_5 | GPIO_PIN_7 |
- GPIO_PIN_8 | GPIO_PIN_9 | GPIO_PIN_10 | GPIO_PIN_14 |
- GPIO_PIN_15;
- HAL_GPIO_Init(GPIOD, &gpio_init_structure);
- /* 配置GPIOE */
- gpio_init_structure.Pin = GPIO_PIN_7 | GPIO_PIN_8 | GPIO_PIN_9 | GPIO_PIN_10 |
- GPIO_PIN_11 | GPIO_PIN_12 | GPIO_PIN_13 | GPIO_PIN_14 |
- GPIO_PIN_15;
- HAL_GPIO_Init(GPIOE, &gpio_init_structure);
- /* 配置GPIOG */
- gpio_init_structure.Pin = GPIO_PIN_0 | GPIO_PIN_1;
- HAL_GPIO_Init(GPIOG, &gpio_init_structure);
- /* 配置GPIOH */
- gpio_init_structure.Pin = GPIO_PIN_8 | GPIO_PIN_9 | GPIO_PIN_10 | GPIO_PIN_11 | GPIO_PIN_12
- | GPIO_PIN_13 | GPIO_PIN_14 | GPIO_PIN_15;
- HAL_GPIO_Init(GPIOH, &gpio_init_structure);
- /* 配置GPIOI */
- gpio_init_structure.Pin = GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_2 | GPIO_PIN_3 | GPIO_PIN_6
- | GPIO_PIN_7 | GPIO_PIN_9 | GPIO_PIN_10;
- HAL_GPIO_Init(GPIOI, &gpio_init_structure);
- }
48.3.2 FMC扩展IO时钟源选择
使用FMC可以选择如下几种时钟源HCLK3,PLL1Q,PLL2R和PER_CK:

我们这里直接使用HCLK3,配置STM32H7的主频为400MHz的时候,HCLK3输出的200MHz,这个速度是FMC支持的最高时钟,正好用于这里:

48.3.3 时序配置(重要)
这里要补充两个重要的知识点,74HC574的CP端接收到上升沿触发到Qn输出的时间参数:


通过时序图和对应的参数要了解到以下几点:
tpd传输延迟在这里等效于tPHL和tPLH。
V7开发板的74HC574有三片是3.3V供电,另外一片是5V供电。参数表格里面没有给3.3V供电时的参数,也没有最小值。
了解了74HC574,再来看SN74HC02:


通过时序图和对应的参数要了解到以下几点:
tpd传输延迟在这里等效于tPHL和tPLH。
tt过渡时间等效于tr上升沿时间和tf下降沿时间。
V7开发板的74HC574有两片是3.3V供电,另外两片是5V供电。参数表格里面没有给3.3V和5V供电时的参数,也没有最小值。
对应74HC574和74HC02的时序参数有个了解后,再来看本章2.3小节末尾的问题:

当写使能信号NWE出现下降沿后,74H02或非门就会输出一个上升沿,然后触发74HC574做锁存。此时我们要考虑到一个重要的知识点,就是使用的数字逻辑芯片有个传输延迟问题,也就是要我们要保证74HC02的tpd传输延迟时间 + 74HC02的tr传输延迟时间 + 74HC574的tpd传输延迟时间的这段时间内,数据总线上要有数据,所以保证DATAST数据建立时间够大就行。实际测试FMC频率在200MHz的情况下,2-3个FMC时钟周期就已经可以正常使用。
有了这些认识后,再来看FMC的时序配置就比较好理解了:
- 1. /*
- 2. ******************************************************************************************************
- 3. * 函 数 名: HC574_ConfigFMC
- 4. * 功能说明: 配置FMC并口访问时序
- 5. * 形 参: 无
- 6. * 返 回 值: 无
- 7. ******************************************************************************************************
- 8. */
- 9. static void HC574_ConfigFMC(void)
- 10. {
- 11. SRAM_HandleTypeDef hsram = {0};
- 12. FMC_NORSRAM_TimingTypeDef SRAM_Timing = {0};
- 13.
- 14. hsram.Instance = FMC_NORSRAM_DEVICE;
- 15. hsram.Extended = FMC_NORSRAM_EXTENDED_DEVICE;
- 16.
- 17. /* FMC使用的HCLK3,主频200MHz,1个FMC时钟周期就是5ns */
- 18. /* SRAM 总线时序配置 4-1-2-1-2-2 不稳定,5-2-2-1-2-2 稳定 */
- 19. SRAM_Timing.AddressSetupTime = 5; /* 5*5ns=25ns,地址建立时间,范围0 -15个FMC时钟周期个数 */
- 20. SRAM_Timing.AddressHoldTime = 2; /* 地址保持时间,配置为模式A时,用不到此参数 范围1 -15个时
- 21. 钟周期个数 */
- 22. SRAM_Timing.DataSetupTime = 2; /* 2*5ns=10ns,数据保持时间,范围1 -255个时钟周期个数 */
- 23. SRAM_Timing.BusTurnAroundDuration = 1; /* 此配置用不到这个参数 */
- 24. SRAM_Timing.CLKDivision = 2; /* 此配置用不到这个参数 */
- 25. SRAM_Timing.DataLatency = 2; /* 此配置用不到这个参数 */
- 26. SRAM_Timing.AccessMode = FMC_ACCESS_MODE_A; /* 配置为模式A */
- 27.
- 28. hsram.Init.NSBank = FMC_NORSRAM_BANK1; /* 使用的BANK1,即使用的片选FMC_NE1 */
- 29. hsram.Init.DataAddressMux = FMC_DATA_ADDRESS_MUX_DISABLE; /* 禁止地址数据复用 */
- 30. hsram.Init.MemoryType = FMC_MEMORY_TYPE_SRAM; /* 存储器类型SRAM */
- 31. hsram.Init.MemoryDataWidth = FMC_NORSRAM_MEM_BUS_WIDTH_32; /* 32位总线宽度 */
- 32. hsram.Init.BurstAccessMode = FMC_BURST_ACCESS_MODE_DISABLE; /* 关闭突发模式 */
- 33. hsram.Init.WaitSignalPolarity = FMC_WAIT_SIGNAL_POLARITY_LOW; /* 用于设置等待信号的极性,关闭突
- 34. 发模式,此参数无效 */
- 35. hsram.Init.WaitSignalActive = FMC_WAIT_TIMING_BEFORE_WS; /* 关闭突发模式,此参数无效 */
- 36. hsram.Init.WriteOperation = FMC_WRITE_OPERATION_ENABLE; /* 用于使能或者禁止写保护 */
- 37. hsram.Init.WaitSignal = FMC_WAIT_SIGNAL_DISABLE; /* 关闭突发模式,此参数无效 */
- 38. hsram.Init.ExtendedMode = FMC_EXTENDED_MODE_DISABLE; /* 禁止扩展模式 */
- 39. hsram.Init.AsynchronousWait = FMC_ASYNCHRONOUS_WAIT_DISABLE; /* 用于异步传输期间,使能或者禁止
- 40. 等待信号,这里选择关闭 */
- 41. hsram.Init.WriteBurst = FMC_WRITE_BURST_DISABLE; /* 禁止写突发 */
- 42. hsram.Init.ContinuousClock = FMC_CONTINUOUS_CLOCK_SYNC_ONLY; /* 仅同步模式才做时钟输出 */
- 43. hsram.Init.WriteFifo = FMC_WRITE_FIFO_ENABLE; /* 使能写FIFO */
- 44.
- 45. /* 初始化SRAM控制器 */
- 46. if (HAL_SRAM_Init(&hsram, &SRAM_Timing, &SRAM_Timing) != HAL_OK)
- 47. {
- 48. /* 初始化错误 */
- 49. Error_Handler(__FILE__, __LINE__);
- 50. }
- 51. }
这里把几个关键的地方阐释下:
第11 - 12行,对作为局部变量的HAL库结构体做初始化,防止不确定值配置时出问题。
第19行,地址建立时间,对于FMC的IO扩展来说,这个地方取值0都可以,因为主要还是ADDST数据建立时间起作用。但是考虑到扩展IO外接了多个控制设备,这里取值5个FMC时钟周期,大家可以根据实际情况做减小出来。
第20行,地址保持时间,对于FMC模式A来说,此参数用不到。
第22行,数据建立时间,实际测试2个FMC时钟周期就可以正常使用,大家可以根据情况加大此数值。
第23 – 25行,当前配置用不到这三个参数。
第28行,使用的BANK1,即使用的片选FMC_NE1。
第31行,由于是扩展的32路IO,所以这里要配置为32位带宽。
48.3.4 MPU配置
实际测试发现,使能FMC_NE1所管理的存储区的Cache功能后,会出现扩展IO的NE片选和NWE信号输出2次的问题。经过各种Cache方式配置、FMC带宽配置、操作FMC时的数据位宽设置,发现禁止了Cache功能就正常了,也就是说,设置FMC_NE1所管理的存储区MPU属性为Device或者Strongly Ordered即可。
- /* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */
- MPU_InitStruct.Enable = MPU_REGION_ENABLE;
- MPU_InitStruct.BaseAddress = 0x60000000;
- MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB;
- MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
- MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
- MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
- MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
- MPU_InitStruct.Number = MPU_REGION_NUMBER1;
- MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
- MPU_InitStruct.SubRegionDisable = 0x00;
- MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
- HAL_MPU_ConfigRegion(&MPU_InitStruct);
MPU配置中直接从FMC_NE1的首地址开始配置,设置了64KB空间的属性。将FMC_NE1通过译码器所管理的所有设备地址全部设置为此配置:
48.3.5 操作数据位宽注意事项
在bsp_fmc_io.c文件开头有个宏定义#define HC574_PORT *(uint32_t *)0x60001000。特别注意,这里是要操作地址0x60001000上的32位数据空间,即做了一个强制转换uint32_t *,要跟FMC配置时设置的位宽一致。这样做的原因,在第47章的2.6小节有说明。
48.4 FMC扩展IO板级支持包(bsp_fmc_io.c)
驱动文件bsp_fmc_io.c提供了如下几个函数供用户调用:
bsp_InitExtIO
HC574_SetPin
HC574_TogglePin
HC574_GetPin
48.4.1 函数bsp_InitExtIO
函数原型:
- /*
- *********************************************************************************************************
- * 函 数 名: bsp_InitExtIO
- * 功能说明: 配置扩展IO相关的GPIO. 上电只能执行一次。
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- void bsp_InitExtIO(void)
- {
- HC574_ConfigGPIO();
- HC574_ConfigFMC();
- /* 将开发板一些片选,LED口设置为高 */
- g_HC574 = (NRF24L01_CE | VS1053_XDCS | LED1 | LED2 | LED3 | LED4);
- HC574_PORT = g_HC574; /* 写硬件端口,更改IO状态 */
- }
函数描述:
此函数用于初始化FMC扩展IO所用到的GPIO和FMC的参数配置。
使用举例:
作为初始化函数,直接在在bsp.c文件的bsp_Init函数里面调用即可。
48.4.2 函数HC574_SetPin
函数原型:
- /*
- *********************************************************************************************************
- * 函 数 名: HC574_SetPin
- * 功能说明: 设置74HC574端口值
- * 形 参: _pin : 管脚号, 0-31; 只能选1个,不能多选
- * _value : 设定的值,0或1
- * 返 回 值: 无
- *********************************************************************************************************
- */
- void HC574_SetPin(uint32_t _pin, uint8_t _value)
- {
- if (_value == 0)
- {
- g_HC574 &= (~_pin);
- }
- else
- {
- g_HC574 |= _pin;
- }
- HC574_PORT = g_HC574;
- }
函数描述:
此函数用于设置扩展IO的输出状态。调用此函数前,要保证调用了函数bsp_InitExtIO进行了初始化。
函数参数:
第1个参数是扩展IO的引脚,支持的形参如下,每次仅支持调用下面1个,不支持多个IO一起操作。
- #define GPIO_PIN_0 ((uint16_t)0x0001) /* Pin 0 selected */
- #define GPIO_PIN_1 ((uint16_t)0x0002) /* Pin 1 selected */
- #define GPIO_PIN_2 ((uint16_t)0x0004) /* Pin 2 selected */
- #define GPIO_PIN_3 ((uint16_t)0x0008) /* Pin 3 selected */
- #define GPIO_PIN_4 ((uint16_t)0x0010) /* Pin 4 selected */
- #define GPIO_PIN_5 ((uint16_t)0x0020) /* Pin 5 selected */
- #define GPIO_PIN_6 ((uint16_t)0x0040) /* Pin 6 selected */
- #define GPIO_PIN_7 ((uint16_t)0x0080) /* Pin 7 selected */
- #define GPIO_PIN_8 ((uint16_t)0x0100) /* Pin 8 selected */
- #define GPIO_PIN_9 ((uint16_t)0x0200) /* Pin 9 selected */
- #define GPIO_PIN_10 ((uint16_t)0x0400) /* Pin 10 selected */
- #define GPIO_PIN_11 ((uint16_t)0x0800) /* Pin 11 selected */
- #define GPIO_PIN_12 ((uint16_t)0x1000) /* Pin 12 selected */
- #define GPIO_PIN_13 ((uint16_t)0x2000) /* Pin 13 selected */
- #define GPIO_PIN_14 ((uint16_t)0x4000) /* Pin 14 selected */
- #define GPIO_PIN_15 ((uint16_t)0x8000) /* Pin 15 selected */
- #define GPIO_PIN_16 ((uint32_t)0x00010000) /* Pin 16 selected */
- #define GPIO_PIN_17 ((uint32_t)0x00020000) /* Pin 17 selected */
- #define GPIO_PIN_18 ((uint32_t)0x00040000) /* Pin 18 selected */
- #define GPIO_PIN_19 ((uint32_t)0x00080000) /* Pin 19 selected */
- #define GPIO_PIN_20 ((uint32_t)0x00100000) /* Pin 20 selected */
- #define GPIO_PIN_21 ((uint32_t)0x00200000) /* Pin 21 selected */
- #define GPIO_PIN_22 ((uint32_t)0x00400000) /* Pin 22 selected */
- #define GPIO_PIN_23 ((uint32_t)0x00800000) /* Pin 23 selected */
- #define GPIO_PIN_24 ((uint32_t)0x01000000) /* Pin 24 selected */
- #define GPIO_PIN_25 ((uint32_t)0x02000000) /* Pin 25 selected */
- #define GPIO_PIN_26 ((uint32_t)0x04000000) /* Pin 26 selected */
- #define GPIO_PIN_27 ((uint32_t)0x08000000) /* Pin 27 selected */
- #define GPIO_PIN_28 ((uint32_t)0x10000000) /* Pin 28 selected */
- #define GPIO_PIN_29 ((uint32_t)0x20000000) /* Pin 29 selected */
- #define GPIO_PIN_30 ((uint32_t)0x40000000) /* Pin 30 selected */
- #define GPIO_PIN_31 ((uint32_t)0x80000000) /* Pin 31 selected */
第2个参数用于设置指定扩展IO的高低电平,0表示输出低电平,1表示输出高电平。
使用举例:
比如设置扩展IO引脚GPIO_PIN_23为高电平:HC574_SetPin(GPIO_PIN_23, 1)。
48.4.3 函数HC574_TogglePin
函数原型:
- /*
- *********************************************************************************************************
- * 函 数 名: HC574_TogglePin
- * 功能说明: 饭庄74HC574端口值
- * 形 参: _pin : 管脚号, 0-31; 只能选1个,不能多选
- * 返 回 值: 无
- *********************************************************************************************************
- */
- void HC574_TogglePin(uint32_t _pin)
- {
- if (g_HC574 & _pin)
- {
- g_HC574 &= (~_pin);
- }
- else
- {
- g_HC574 |= _pin;
- }
- HC574_PORT = g_HC574;
- }
函数描述:
此函数用于FMC扩展IO的翻转。调用此函数前,要保证调用了函数bsp_InitExtIO进行了初始化。
函数参数:
第1个参数是扩展IO的引脚,支持的形参如下,每次仅支持调用下面1个,不支持多个IO一起操作。
- #define GPIO_PIN_0 ((uint16_t)0x0001) /* Pin 0 selected */
- #define GPIO_PIN_1 ((uint16_t)0x0002) /* Pin 1 selected */
- #define GPIO_PIN_2 ((uint16_t)0x0004) /* Pin 2 selected */
- #define GPIO_PIN_3 ((uint16_t)0x0008) /* Pin 3 selected */
- #define GPIO_PIN_4 ((uint16_t)0x0010) /* Pin 4 selected */
- #define GPIO_PIN_5 ((uint16_t)0x0020) /* Pin 5 selected */
- #define GPIO_PIN_6 ((uint16_t)0x0040) /* Pin 6 selected */
- #define GPIO_PIN_7 ((uint16_t)0x0080) /* Pin 7 selected */
- #define GPIO_PIN_8 ((uint16_t)0x0100) /* Pin 8 selected */
- #define GPIO_PIN_9 ((uint16_t)0x0200) /* Pin 9 selected */
- #define GPIO_PIN_10 ((uint16_t)0x0400) /* Pin 10 selected */
- #define GPIO_PIN_11 ((uint16_t)0x0800) /* Pin 11 selected */
- #define GPIO_PIN_12 ((uint16_t)0x1000) /* Pin 12 selected */
- #define GPIO_PIN_13 ((uint16_t)0x2000) /* Pin 13 selected */
- #define GPIO_PIN_14 ((uint16_t)0x4000) /* Pin 14 selected */
- #define GPIO_PIN_15 ((uint16_t)0x8000) /* Pin 15 selected */
- #define GPIO_PIN_16 ((uint32_t)0x00010000) /* Pin 16 selected */
- #define GPIO_PIN_17 ((uint32_t)0x00020000) /* Pin 17 selected */
- #define GPIO_PIN_18 ((uint32_t)0x00040000) /* Pin 18 selected */
- #define GPIO_PIN_19 ((uint32_t)0x00080000) /* Pin 19 selected */
- #define GPIO_PIN_20 ((uint32_t)0x00100000) /* Pin 20 selected */
- #define GPIO_PIN_21 ((uint32_t)0x00200000) /* Pin 21 selected */
- #define GPIO_PIN_22 ((uint32_t)0x00400000) /* Pin 22 selected */
- #define GPIO_PIN_23 ((uint32_t)0x00800000) /* Pin 23 selected */
- #define GPIO_PIN_24 ((uint32_t)0x01000000) /* Pin 24 selected */
- #define GPIO_PIN_25 ((uint32_t)0x02000000) /* Pin 25 selected */
- #define GPIO_PIN_26 ((uint32_t)0x04000000) /* Pin 26 selected */
- #define GPIO_PIN_27 ((uint32_t)0x08000000) /* Pin 27 selected */
- #define GPIO_PIN_28 ((uint32_t)0x10000000) /* Pin 28 selected */
- #define GPIO_PIN_29 ((uint32_t)0x20000000) /* Pin 29 selected */
- #define GPIO_PIN_30 ((uint32_t)0x40000000) /* Pin 30 selected */
- #define GPIO_PIN_31 ((uint32_t)0x80000000) /* Pin 31 selected */
使用举例:
比如翻转扩展IO引脚GPIO_PIN_23为高电平:HC574_TogglePin(GPIO_PIN_23)。
48.4.4 函数HC574_GetPin
函数原型:
- /*
- *********************************************************************************************************
- * 函 数 名: HC574_GetPin
- * 功能说明: 判断指定的管脚输出是1还是0
- * 形 参: _pin : 管脚号, 0-31; 只能选1个,不能多选
- * 返 回 值: 0或1
- *********************************************************************************************************
- */
- uint8_t HC574_GetPin(uint32_t _pin)
- {
- if (g_HC574 & _pin)
- {
- return 1;
- }
- else
- {
- return 0;
- }
- }
函数描述:
此函数用于读取FMC扩展IO的状态。调用此函数前,要保证调用了函数bsp_InitExtIO进行了初始化。
函数参数:
第1个参数是扩展IO的引脚,支持的形参如下,每次仅支持调用下面1个,不支持多个IO一起操作。
- #define GPIO_PIN_0 ((uint16_t)0x0001) /* Pin 0 selected */
- #define GPIO_PIN_1 ((uint16_t)0x0002) /* Pin 1 selected */
- #define GPIO_PIN_2 ((uint16_t)0x0004) /* Pin 2 selected */
- #define GPIO_PIN_3 ((uint16_t)0x0008) /* Pin 3 selected */
- #define GPIO_PIN_4 ((uint16_t)0x0010) /* Pin 4 selected */
- #define GPIO_PIN_5 ((uint16_t)0x0020) /* Pin 5 selected */
- #define GPIO_PIN_6 ((uint16_t)0x0040) /* Pin 6 selected */
- #define GPIO_PIN_7 ((uint16_t)0x0080) /* Pin 7 selected */
- #define GPIO_PIN_8 ((uint16_t)0x0100) /* Pin 8 selected */
- #define GPIO_PIN_9 ((uint16_t)0x0200) /* Pin 9 selected */
- #define GPIO_PIN_10 ((uint16_t)0x0400) /* Pin 10 selected */
- #define GPIO_PIN_11 ((uint16_t)0x0800) /* Pin 11 selected */
- #define GPIO_PIN_12 ((uint16_t)0x1000) /* Pin 12 selected */
- #define GPIO_PIN_13 ((uint16_t)0x2000) /* Pin 13 selected */
- #define GPIO_PIN_14 ((uint16_t)0x4000) /* Pin 14 selected */
- #define GPIO_PIN_15 ((uint16_t)0x8000) /* Pin 15 selected */
- #define GPIO_PIN_16 ((uint32_t)0x00010000) /* Pin 16 selected */
- #define GPIO_PIN_17 ((uint32_t)0x00020000) /* Pin 17 selected */
- #define GPIO_PIN_18 ((uint32_t)0x00040000) /* Pin 18 selected */
- #define GPIO_PIN_19 ((uint32_t)0x00080000) /* Pin 19 selected */
- #define GPIO_PIN_20 ((uint32_t)0x00100000) /* Pin 20 selected */
- #define GPIO_PIN_21 ((uint32_t)0x00200000) /* Pin 21 selected */
- #define GPIO_PIN_22 ((uint32_t)0x00400000) /* Pin 22 selected */
- #define GPIO_PIN_23 ((uint32_t)0x00800000) /* Pin 23 selected */
- #define GPIO_PIN_24 ((uint32_t)0x01000000) /* Pin 24 selected */
- #define GPIO_PIN_25 ((uint32_t)0x02000000) /* Pin 25 selected */
- #define GPIO_PIN_26 ((uint32_t)0x04000000) /* Pin 26 selected */
- #define GPIO_PIN_27 ((uint32_t)0x08000000) /* Pin 27 selected */
- #define GPIO_PIN_28 ((uint32_t)0x10000000) /* Pin 28 selected */
- #define GPIO_PIN_29 ((uint32_t)0x20000000) /* Pin 29 selected */
- #define GPIO_PIN_30 ((uint32_t)0x40000000) /* Pin 30 selected */
- #define GPIO_PIN_31 ((uint32_t)0x80000000) /* Pin 31 selected */
返回值,返回0表示低电平,返回1表示高电平。
使用举例:
比如获取扩展IO的GPIO_PIN_23高低电平状态,调用函数HC574_GetPin(GPIO_PIN_23)获取即可。
48.5 FMC扩展IO驱动移植和使用
扩展IO的移植比较方便:
第1步:复制bsp_fmc_io.c和bsp_fmc_io.h到自己的工程目录,并添加到工程里面。
第2步:这几个驱动文件主要用到HAL库的GPIO和FMC驱动文件,简单省事些可以添加所有HAL库.C源文件进来。
第3步,应用方法看本章节配套例子即可,另外就是根据自己的需要做配置修改。
48.6 实验例程设计框架
通过程序设计框架,让大家先对配套例程有一个全面的认识,然后再理解细节,本次实验例程的设计框架如下:
第1阶段,上电启动阶段:
这部分在第14章进行了详细说明。
第2阶段,进入main函数:
第1步,硬件初始化,主要是MPU,Cache,HAL库,系统时钟,滴答定时器,LED和串口。
第2步,按键应用程序设计部分。定时器中断服务程序里面实现翻转FMC扩展引脚20和23。
48.7 实验例程说明(MDK)
配套例子:
V7-027-FMC总线扩展32路高速IO
实验目的:
学习FMC总线扩展32路高速IO。
实验内容:
系统上电后驱动了1个软件定时器,每100ms翻转一次LED2。
启动1个TIM6周期性中断,频率10KHz,在中断服务程序里面翻转FMC扩展引脚20和23。
实验操作:
K1按键按下,开启TIM6的周期性中断。
K2按键按下,关闭TIM6的周期性中断。
FMC扩展引脚20和23的位置:

上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1

程序设计:
系统栈大小分配:

RAM空间用的DTCM:

硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
- /*
- *********************************************************************************************************
- * 函 数 名: bsp_Init
- * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次
- * 形 参:无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- void bsp_Init(void)
- {
- /* 配置MPU */
- MPU_Config();
- /* 使能L1 Cache */
- CPU_CACHE_Enable();
- /*
- STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟:
- - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。
- - 设置NVIV优先级分组为4。
- */
- HAL_Init();
- /*
- 配置系统时钟到400MHz
- - 切换使用HSE。
- - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。
- */
- SystemClock_Config();
- /*
- Event Recorder:
- - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。
- - 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章
- */
- #if Enable_EventRecorder == 1
- /* 初始化EventRecorder并开启 */
- EventRecorderInitialize(EventRecordAll, 1U);
- EventRecorderStart();
- #endif
- bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */
- bsp_InitTimer(); /* 初始化滴答定时器 */
- bsp_InitUart(); /* 初始化串口 */
- bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */
- bsp_InitLed(); /* 初始化LED */
- }
MPU配置和Cache配置:
数据Cache和指令Cache都开启。配置了AXI SRAM区(本例子未用到AXI SRAM)和FMC的扩展IO区。
- /*
- *********************************************************************************************************
- * 函 数 名: MPU_Config
- * 功能说明: 配置MPU
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void MPU_Config( void )
- {
- MPU_Region_InitTypeDef MPU_InitStruct;
- /* 禁止 MPU */
- HAL_MPU_Disable();
- /* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */
- MPU_InitStruct.Enable = MPU_REGION_ENABLE;
- MPU_InitStruct.BaseAddress = 0x24000000;
- MPU_InitStruct.Size = MPU_REGION_SIZE_512KB;
- MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
- MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
- MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
- MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
- MPU_InitStruct.Number = MPU_REGION_NUMBER0;
- MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1;
- MPU_InitStruct.SubRegionDisable = 0x00;
- MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
- HAL_MPU_ConfigRegion(&MPU_InitStruct);
- /* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */
- MPU_InitStruct.Enable = MPU_REGION_ENABLE;
- MPU_InitStruct.BaseAddress = 0x60000000;
- MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB;
- MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
- MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
- MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
- MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
- MPU_InitStruct.Number = MPU_REGION_NUMBER1;
- MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
- MPU_InitStruct.SubRegionDisable = 0x00;
- MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
- HAL_MPU_ConfigRegion(&MPU_InitStruct);
- /*使能 MPU */
- HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
- }
- /*
- *********************************************************************************************************
- * 函 数 名: CPU_CACHE_Enable
- * 功能说明: 使能L1 Cache
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void CPU_CACHE_Enable(void)
- {
- /* 使能 I-Cache */
- SCB_EnableICache();
- /* 使能 D-Cache */
- SCB_EnableDCache();
- }
主功能:
主程序实现如下操作:
K1按键按下,开启TIM6的周期性中断。
K2按键按下,关闭TIM6的周期性中断。
- /*
- *********************************************************************************************************
- * 函 数 名: main
- * 功能说明: c程序入口
- * 形 参: 无
- * 返 回 值: 错误代码(无需处理)
- *********************************************************************************************************
- */
- int main(void)
- {
- uint8_t ucKeyCode; /* 按键代码 */
- bsp_Init(); /* 硬件初始化 */
- PrintfLogo(); /* 打印例程名称和版本等信息 */
- PrintfHelp(); /* 打印操作提示 */
- bsp_StartAutoTimer(0, 100); /* 启动1个100ms的自动重装的定时器 */
- bsp_SetTIMforInt(TIM6, 10000, 2, 0); /* 设置为10KHz频率定时器中断*/
- /* 进入主程序循环体 */
- while (1)
- {
- bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */
- /* 判断定时器超时时间 */
- if (bsp_CheckTimer(0))
- {
- /* 每隔100ms 进来一次 */
- bsp_LedToggle(2);
- }
- /* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */
- ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */
- if (ucKeyCode != KEY_NONE)
- {
- switch (ucKeyCode)
- {
- case KEY_DOWN_K1: /* K1键按下,开启TIM6的周期性中断*/
- TIM6->DIER |= TIM_IT_UPDATE;
- break;
- case KEY_DOWN_K2: /* K2键按下,关闭TIM6的周期性中断*/
- TIM6->DIER &= ~TIM_IT_UPDATE;
- break;
- default:
- /* 其它的键值不处理 */
- break;
- }
- }
- }
- }
定时器6中断服务程序:
- /*
- *********************************************************************************************************
- * 函 数 名: TIM6_DAC_IRQHandler
- * 功能说明: TIM6定时中断服务程序
- * 返 回 值: 无
- *********************************************************************************************************
- */
- void TIM6_DAC_IRQHandler(void)
- {
- if((TIM6->SR & TIM_FLAG_UPDATE) != RESET)
- {
- /* 清除更新标志 */
- TIM6->SR = ~ TIM_FLAG_UPDATE;
- /* 翻转FMC扩展引脚20和23脚 */
- HC574_TogglePin(GPIO_PIN_23);
- HC574_TogglePin(GPIO_PIN_20);
- }
- }
48.8 实验例程说明(IAR)
配套例子:
V7-027-FMC总线扩展32路高速IO
实验目的:
学习FMC总线扩展32路高速IO。
实验内容:
系统上电后驱动了1个软件定时器,每100ms翻转一次LED2。
启动1个TIM6周期性中断,频率10KHz,在中断服务程序里面翻转FMC扩展引脚20和23。
实验操作:
K1按键按下,开启TIM6的周期性中断。
K2按键按下,关闭TIM6的周期性中断。
FMC扩展引脚20和23的位置:

上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1

程序设计:
系统栈大小分配:

RAM空间用的DTCM:

硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
- /*
- *********************************************************************************************************
- * 函 数 名: bsp_Init
- * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次
- * 形 参:无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- void bsp_Init(void)
- {
- /* 配置MPU */
- MPU_Config();
- /* 使能L1 Cache */
- CPU_CACHE_Enable();
- /*
- STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟:
- - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。
- - 设置NVIV优先级分组为4。
- */
- HAL_Init();
- /*
- 配置系统时钟到400MHz
- - 切换使用HSE。
- - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。
- */
- SystemClock_Config();
- /*
- Event Recorder:
- - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。
- - 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章
- */
- #if Enable_EventRecorder == 1
- /* 初始化EventRecorder并开启 */
- EventRecorderInitialize(EventRecordAll, 1U);
- EventRecorderStart();
- #endif
- bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */
- bsp_InitTimer(); /* 初始化滴答定时器 */
- bsp_InitUart(); /* 初始化串口 */
- bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */
- bsp_InitLed(); /* 初始化LED */
- }
MPU配置和Cache配置:
数据Cache和指令Cache都开启。配置了AXI SRAM区(本例子未用到AXI SRAM)和FMC的扩展IO区。
- /*
- *********************************************************************************************************
- * 函 数 名: MPU_Config
- * 功能说明: 配置MPU
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void MPU_Config( void )
- {
- MPU_Region_InitTypeDef MPU_InitStruct;
- /* 禁止 MPU */
- HAL_MPU_Disable();
- /* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */
- MPU_InitStruct.Enable = MPU_REGION_ENABLE;
- MPU_InitStruct.BaseAddress = 0x24000000;
- MPU_InitStruct.Size = MPU_REGION_SIZE_512KB;
- MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
- MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
- MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
- MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
- MPU_InitStruct.Number = MPU_REGION_NUMBER0;
- MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1;
- MPU_InitStruct.SubRegionDisable = 0x00;
- MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
- HAL_MPU_ConfigRegion(&MPU_InitStruct);
- /* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */
- MPU_InitStruct.Enable = MPU_REGION_ENABLE;
- MPU_InitStruct.BaseAddress = 0x60000000;
- MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB;
- MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
- MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
- MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
- MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
- MPU_InitStruct.Number = MPU_REGION_NUMBER1;
- MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
- MPU_InitStruct.SubRegionDisable = 0x00;
- MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
- HAL_MPU_ConfigRegion(&MPU_InitStruct);
- /*使能 MPU */
- HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
- }
- /*
- *********************************************************************************************************
- * 函 数 名: CPU_CACHE_Enable
- * 功能说明: 使能L1 Cache
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void CPU_CACHE_Enable(void)
- {
- /* 使能 I-Cache */
- SCB_EnableICache();
- /* 使能 D-Cache */
- SCB_EnableDCache();
- }
主功能:
主程序实现如下操作:
K1按键按下,开启TIM6的周期性中断。
K2按键按下,关闭TIM6的周期性中断。
- /*
- *********************************************************************************************************
- * 函 数 名: main
- * 功能说明: c程序入口
- * 形 参: 无
- * 返 回 值: 错误代码(无需处理)
- *********************************************************************************************************
- */
- int main(void)
- {
- uint8_t ucKeyCode; /* 按键代码 */
- bsp_Init(); /* 硬件初始化 */
- PrintfLogo(); /* 打印例程名称和版本等信息 */
- PrintfHelp(); /* 打印操作提示 */
- bsp_StartAutoTimer(0, 100); /* 启动1个100ms的自动重装的定时器 */
- bsp_SetTIMforInt(TIM6, 10000, 2, 0); /* 设置为10KHz频率定时器中断*/
- /* 进入主程序循环体 */
- while (1)
- {
- bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */
- /* 判断定时器超时时间 */
- if (bsp_CheckTimer(0))
- {
- /* 每隔100ms 进来一次 */
- bsp_LedToggle(2);
- }
- /* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */
- ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */
- if (ucKeyCode != KEY_NONE)
- {
- switch (ucKeyCode)
- {
- case KEY_DOWN_K1: /* K1键按下,开启TIM6的周期性中断*/
- TIM6->DIER |= TIM_IT_UPDATE;
- break;
- case KEY_DOWN_K2: /* K2键按下,关闭TIM6的周期性中断*/
- TIM6->DIER &= ~TIM_IT_UPDATE;
- break;
- default:
- /* 其它的键值不处理 */
- break;
- }
- }
- }
- }
定时器6中断服务程序:
- /*
- *********************************************************************************************************
- * 函 数 名: TIM6_DAC_IRQHandler
- * 功能说明: TIM6定时中断服务程序
- * 返 回 值: 无
- *********************************************************************************************************
- */
- void TIM6_DAC_IRQHandler(void)
- {
- if((TIM6->SR & TIM_FLAG_UPDATE) != RESET)
- {
- /* 清除更新标志 */
- TIM6->SR = ~ TIM_FLAG_UPDATE;
- /* 翻转FMC扩展引脚20和23脚 */
- HC574_TogglePin(GPIO_PIN_23);
- HC574_TogglePin(GPIO_PIN_20);
- }
- }
48.9 总结
本章节就为大家讲解这么多,由于FMC总线可以扩展出32路高速IO且使用简单,所以实际项目中也比较有实用价值,望初学者熟练掌握。
|
.png) STMCU小助手
发布时间:2021-12-27 17:00
STMCU小助手
发布时间:2021-12-27 17:00













 微信公众号
微信公众号
 手机版
手机版