.png) STMCU小助手
发布时间:2021-12-27 18:00
STMCU小助手
发布时间:2021-12-27 18:00
|
STM32H7的启动过程分析 启动文件 不同编译器对应的启动文件不同,在MDK下,以startup_stm32h743xx.s为例,这是一个汇编文件,启动文件中主要做了如下事情: 设置堆栈指针 SP = __initial_sp。 设置 PC 指针 = Reset_Handler。 设置中断向量表。 配置系统时钟。 配置外部 SRAM/SDRAM 用于程序变量等数据存储(这是可选的)。 跳转到 C 库中的 __main ,最终会调用用户程序的 main()函数。 Cortex-M 内核处理器复位后,处于线程模式,指令权限是特权级别(最高级别),堆栈设置为用主堆栈 MSP。 堆栈指针 通用寄存器组 Cortex – M7/M4/M3 处理器拥有 R0-R15 的通用寄存器组。其中 R13 作为堆栈指针 SP。 SP 有两个,但在同一时刻只能有一个可以用。 主堆栈指针(MSP):这是缺省的堆栈指针,它由 OS 内核、异常服务例程以及所有需要特权访问的应用程序代码来使用。 进程堆栈指针(PSP):用于常规的应用程序代码(不处于异常服务例程中时)。 另外以下两点要注意: 大多数情况下的应用,只需使用指针 MSP,而 PSP 多用于 RTOS 中。 R13 的最低两位被硬线连接到 0,并且总是读出 0,这意味着堆栈总是 4 字节对齐的。 Cortex-M7/M4/M3 向下生长的满栈 PUSH 入栈操作:SP 先自减 4,再存入新的数值 POP 出栈操作:先从 SP 指针处读出上一次被压入的值,再把 SP 指针自增 4 分析启动过程 硬件上电后,会触发硬件复位,复位之后,CPU 内的时序逻辑电路首先完成如下两个工作(程序代码下载到内部 flash 为例,flash首地址 0x0800 0000) 将 0x08000000 位置存放的堆栈栈顶地址存放到 SP 中(MSP)。 将 0x08000004 位置存放的向量地址装入 PC 程序计数器。 CPU 从 PC 寄存器指向的物理地址取出第 1 条指令开始执行程序,也就是开始执行复位中断服务程序 Reset_Handler。为啥,因为在启动文件中,最先做的两件事情是 设置堆栈指针 SP = __initial_sp 设置 PC 指针 = Reset_Handler 复位中断服务程序会调用SystemInit()函数来配置系统时钟、配置FMC总线上的外部SRAM/SDRAM,然后跳转到 C 库中__main 函数。由 C 库中的__main 函数完成用户程序的初始化工作(比如:变量赋初值等),最后由__main 函数调用用户写的 main()函数开始执行 C 程序。 代码分析 ①、开辟栈(stack)空间,用于局部变量、函数调用、函数的参数等
①、开辟堆(heap)空间,主要用于动态内存分配,也就是说用 malloc,calloc, realloc 等函数 分配的变量空间是在堆上
③、生成属性设置、定义RESET代码段
④、中断向量变定义
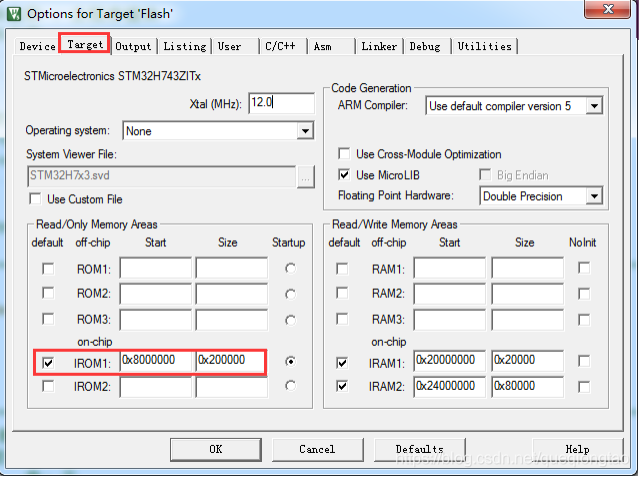
上面的这段代码是建立中断向量表,中断向量表定位在代码段的最前面。具体的物理地址由链接器的配置参数(IROM1 的地址)决定。如果程序在 Flash 运行,则中断向量表的起始地址是0x08000000。以 MDK 为例,就是如下配置选项: 
DCD 表示分配 1 个 4 字节的空间。每行 DCD 都会生成一个 4 字节的二进制代码。中断向量表存放的实际上是中断服务程序的入口地址。当异常(也即是中断事件)发生时,CPU 的中断系统会将相应的入口地址赋值给 PC 程序计数器,之后就开始执行中断服务程序 ⑤、代码段定义、Reset_Handler过程处理
AREA 定义一块代码段,只读,段名字是 .text 。 READONLY 表示只读 利用 PROC、 ENDP 这一对伪指令把程序段分为若干个过程,使程序的结构加清晰。 WEAK 声明其他的同名标号优先于该标号被引用,就是说如果外面声明了的话会调用外面的。 这个声明很重要,它让我们可以在 C 文件中任意地方放置中断服务程序,只要保证 C 函数的名字和向量表中的名字一致即可。 IMPORT:伪指令用于通知编译器要使用的标号在其他的源文件中定义。但要在当前源文件中引用,而且无论当前源文件是否引用该标号,该标号均会被加入到当前源文件的符号表中。 SystemInit 函数在文件 system_stm32h7xx.c 里面,主要实现 RCC 相关寄存器复位和中断向量表位置设置。 __main 标号表示 C/C++标准实时库函数里的一个初始化子程序__main 的入口地址。该程序的一个主要作用是初始化堆栈(跳转__user_initial_stackheap 标号进行初始化堆栈的,下面会讲到这个标号),并初始化映像文件,最后跳转到 C 程序中的 main 函数。这就解释了为何所有的 C 程序必须有一个 main 函数作为程序的起点。因为这是由 C/C++标准实时库所规,并且不能更改。 ⑥、缺省中断服务函数定义
这里全部的中断服务函数都是用[WEAK]来声明,假如没有在其他文件中定义同名的中断服务函数,来了中断,就会进入到这里。 ⑦、堆和栈的初始化
BOOT_ADD0 和 BOOT_ADD1 对应 32 位地址到高 16 位,这点要特别注意。 通过这两个选项字节,所有 0x0000 0000 到 0x3FFF 0000 的存储器地址都可以设置,包括: 所有 Flash 地址空间。 所有 RAM 地址空间,ITCM,DTCM 和 SRAM。 设置了选项字节后,掉电不会丢失,下次上电或者复位后,会根据 BOOT 引脚状态从 BOOT_ADD0,或 BOOT_ADD1 所设置的地址进行启动。 使用 BOOT 功能,注意以下几个问题: 如果用户不慎,设置的地址范围不在有效的存储器地址,那么 BOOT = 0 时,会从 Flash 首地址 0x08000000 启动,BOOT = 1 时,会从 ITCM 首地址 0x0000 0000 启动。 当 Flash 的保护级别被配置为级别 2 之后, 只能从 Flash 自举。 如果 BOOT_ADD0/BOOT_ADD1选项字节中自举地址被配置为位于存储器范围之外或属于 RAM 地址范围,则系统只能从地址 0x0800 0000 上的 Flash 开始执行 |
【福利三:逢7发帖赢大礼】想要充分利用STM32H743VI片内的RAM空间(但并不顺利)
【福利三:逢7发帖赢大礼】使用惠勤致远STM32H743VI开发板+ST7796并口彩屏移植LVGL9.5并分享一些额外内容
【 逢7发帖赢大礼】7、TouchGFX中实现云彩流动效果
【 逢7发帖赢大礼】6、TouchGFX中添加图像素材和自定义代码编辑
【 逢7发帖赢大礼】5、TouchGFX 创建自定义界面和交互
【 逢7发帖赢大礼】4、CubeMX工程复用以及TouchGFX应用
【 逢7发帖赢大礼】3、利用CubeMX添加TouchGFX功能:工程修改和编译烧录
【 逢7发帖赢大礼】2、利用CubeMX添加TouchGFX功能:CubeMX配置
【 逢7发帖赢大礼】1、利用CubeMX生成正点原子H7R7开发板的STM32CubeIDE工程
CubeMX生成CubeIDE工程代码乱码
 微信公众号
微信公众号
 手机版
手机版