一. 前言
目前,越来越多的嵌入式产品在开发中使用 RTOS 作为软件平台,同时,开发中对低功耗的要求也越来越高,这篇文档会讨论一下如何在 RTOS 中处理微控制器的低功耗特性。应用中使用的 RTOS 一般采用基于时间片轮转的抢占式任务调度机制,
一般的低功耗设计思路如下:
1. 当 Idle 任务运行时,进入低功耗模式;
2. 在适当的条件下,通过中断或者外部事件唤醒 MCU。
但是,从第二点可以看出,每次当 OS 系统定时器产生中断时,也会将 MCU 从低功耗模式中唤醒,而频繁的进入低功耗模式/从低功耗模式中唤醒会使得 MCU 无法进入深度睡眠,对低功耗设计而言也是不合理的。
在 FreeRTOS 中给出了一种低功耗设计模式 ——Tickless Idle Mode,这个方法可以让 MCU 更长时间的处于低功耗模式。
二.Tickless Idle Mode 的原理及实现
1. 情景分析

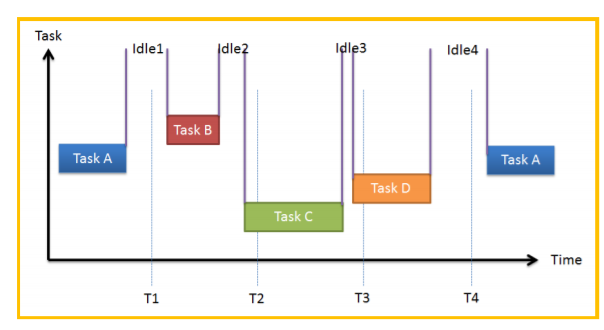
上图是任务调度示意图,横轴是时间轴,T1,T2,T3,T4 是 RTOS 的时间片基准,有四个任务分别是 TaskA,B,C,D,
Task A: 周期性任务
Task B: 周期性任务
Task C: 突发性任务
Task D: 周期性任务
从图中可以看出在四个任务进行调度之间,会有四次空闲期间(此时 RTOS 会调度 Idle 任务运行,软件设计的目标应该是尽可能使 MCU 在 Idle 任务运行时处于低功耗模式)。
Idle1: Idle 任务运行期间,会产生一次系统时钟滴答,此时会唤醒 MCU,唤醒后 MCU 又会进入低功耗模式,这次唤醒是无意义的。期望使 MCU 在 Idle1 期间一直处于低功耗模式,因此适当调整系统定时器中断使得 T1 时不触发系统时钟中断,中断触发点设置为 Task B 到来时;
Idle2:Task C 在系统滴答到达前唤醒 MCU(外部事件),MCU 可以在 Idle2 中可以一直处于低功耗模式;
Idle3: 与 Idle2 情况相同,但 Idle3 时间很短,如果这个时间很短,那么进入低功耗模式的意义并不大,因此在进入低功耗模式时软件应该添加策略;
Idle4: 与 Idle1 情况相同。
2. Tickless Idle Mode 的软件设计原理
Tickless Idle Mode 的设计思想在于尽可能得在 MCU 空闲时使其进入低功耗模式。从上述情景中可以看出软件设计需要解决的问题有:
a. 合理的进入低功耗模式(避免频繁使 MCU 在低功耗模式和运行模式下进行不必要的切换);RTOS 的系统时钟源于硬件的某个周期性定时器(Cortex-M 系列内核多数采用 SysTick),RTOS 的任务调度器可以预期到下一个周期性任务(或者定时器任务)的触发时间,如上文所述,调整系统时钟定时器中断触发时间,可以避免 RTOS 进入不必要的时间中断,从而更长的时间停留在低功耗模式中,此时 RTOS 的时钟不再是周期的而是动态的(在原有的时钟基准时将不再产生中断,即 Tickless);
b. 当 MCU 被唤醒时,通过某种方式提供为系统时钟提供补偿。MCU 可能被两种情况所唤醒,动态调整过的系统时钟中断或者突发性的外部事件,无论是哪一种情况,都可以通过运行在低功耗模式下的某种定时器来计算出 MCU 处于低功耗模式下的时间,在 MCU 唤醒后对系统时间进行软件补偿;
c. 软件实现时,要根据具体的应用情景和 MCU 低功耗特性来处理问题。尤其是 MCU 的低功耗特性,不同 MCU 处于不同的低功耗模式下所能使用的外设(主要是定时器)是不同的,RTOS 的系统时钟可以进行适当的调整。
3. Tickless Idle Mode 的实现
这里以 STM32F407 系列的 MCU 为例,首先需要明确的是 MCU 的低功耗模式,F407 有 3 种低功耗模式,Sleep, Stop, Standby,在 RTOS 平台时,SRAM 和寄存器的数据不应丢失,此外需要一个定时器为 RTOS 提供系统时钟,这里选择 Sleep 模式下进行实现。

使能
- #define configUSE_TICKLESS_IDLE 1
空闲任务(RTOS 空闲时自动调用)
- /* Idle 任务 */
- void prvIdleTask( void *pvParameters )
- {
- for( ; ; )
- {
- ...
- #if ( configUSE_TICKLESS_IDLE != 0 )
- {
- TickType_t xExpectedIdleTime;
- /* 用户策略以决定是否需要进入 Tickless Mode */
- xExpectedIdleTime = prvGetExpectedIdleTime();
- if( xExpectedIdleTime >= configEXPECTED_IDLE_TIME_BEFORE_SLEEP )
- {
- vTaskSuspendAll(); // 挂起调度器
- {
- configASSERT( xNextTaskUnblockTime >= xTickCount );
- xExpectedIdleTime = prvGetExpectedIdleTime();
- if( xExpectedIdleTime >=
- configEXPECTED_IDLE_TIME_BEFORE_SLEEP )
- {
- /* 用户函数接口 */
- /* 1. 进入低功耗模式和如何退出低功耗模式 */
- /* 2. 系统时间补偿 */
- portSUPPRESS_TICKS_AND_SLEEP( xExpectedIdleTime );
- }
- }
- (void) xTaskResumeAll(); // 恢复调度器
- }
- }
- #endif /* configUSE_TICKLESS_IDLE */
- ...
- }
- }
低功耗模式处理(根据 MCU 的低功耗模式编写代码,代码有点长……)
- void vPortSuppressTicksAndSleep( portTickType xExpectedIdleTime )
- {
- unsigned long ulReloadValue, ulCompleteTickPeriods,
- ulCompletedSysTickDecrements;
- portTickType xModifiableIdleTime;
- /* 最长睡眠时间不可以超过定时器的最大定时值 */
- /* 通过调整定时器的时间基准可以获得更理想的最大定时值 */
- if( xExpectedIdleTime > xMaximumPossibleSuppressedTicks )
- {
- xExpectedIdleTime = xMaximumPossibleSuppressedTicks;
- }
- /* 停止 SysTick */
- portNVIC_SYSTICK_CTRL_REG = portNVIC_SYSTICK_CLK_BIT |
- portNVIC_SYSTICK_INT_BIT;
- /* 计算唤醒时的系统时间,用于唤醒后的系统时间补偿 */
- ulReloadValue = portNVIC_SYSTICK_CURRENT_VALUE_REG +
- ( ulTimerCountsForOneTick * ( xExpectedIdleTime - 1UL ) );
- if( ulReloadValue > ulStoppedTimerCompensation )
- {
- ulReloadValue -= ulStoppedTimerCompensation;
- }
- __disable_interrupt();
- /* 确认下是否可以进入低功耗模式 */
- if( eTaskConfirmSleepModeStatus() == eAbortSleep )
- {
- /* 不可以,重新启动系统定时器 */
- portNVIC_SYSTICK_LOAD_REG = portNVIC_SYSTICK_CURRENT_VALUE_REG;
- portNVIC_SYSTICK_CTRL_REG = portNVIC_SYSTICK_CLK_BIT |
- portNVIC_SYSTICK_INT_BIT |
- portNVIC_SYSTICK_ENABLE_BIT;
- portNVIC_SYSTICK_LOAD_REG = ulTimerCountsForOneTick - 1UL;
- __enable_interrupt();
- }
- else
- {
- /* 可以进入低功耗模式 */
- /* 保存时间补偿,重启系统定时器 */
- portNVIC_SYSTICK_LOAD_REG = ulReloadValue;
- portNVIC_SYSTICK_CURRENT_VALUE_REG = 0UL;
- portNVIC_SYSTICK_CTRL_REG = portNVIC_SYSTICK_CLK_BIT |
- portNVIC_SYSTICK_INT_BIT |
- portNVIC_SYSTICK_ENABLE_BIT;
- /* 进入低功耗模式,可以通过 configPRE_SLEEP_PROCESSING 函数进行低功耗模式下
- 时钟及外设的配置*/
- xModifiableIdleTime = xExpectedIdleTime;
- configPRE_SLEEP_PROCESSING( xModifiableIdleTime );
- if( xModifiableIdleTime > 0 )
- {
- __DSB();
- __WFI();
- __ISB();
- }
- /* 退出低功耗模式 */
- configPOST_SLEEP_PROCESSING( xExpectedIdleTime );
- portNVIC_SYSTICK_CTRL_REG = portNVIC_SYSTICK_CLK_BIT |
- portNVIC_SYSTICK_INT_BIT;
- __disable_interrupt()
- __enable_interrupt();
- /*唤醒有两种情况:系统定时器或者外部事件(中断)*/
- if((portNVIC_SYSTICK_CTRL_REG & portNVIC_SYSTICK_COUNT_FLAG_BIT) != 0)
- {
- /* 系统定时器唤醒,时间补偿 */
- unsigned long ulCalculatedLoadValue;
- ulCalculatedLoadValue = ( ulTimerCountsForOneTick - 1UL ) –
- ( ulReloadValue - portNVIC_SYSTICK_CURRENT_VALUE_REG );
- if( ( ulCalculatedLoadValue ulTimerCountsForOneTick ) )
- {
- ulCalculatedLoadValue = (ulTimerCountsForOneTick - 1UL);
- }
- portNVIC_SYSTICK_LOAD_REG = ulCalculatedLoadValue;
- ulCompleteTickPeriods = xExpectedIdleTime - 1UL;
- }
- else
- {
- /* 外部事件(中断)唤醒 */
- ulCompletedSysTickDecrements = ( xExpectedIdleTime *
- ulTimerCountsForOneTick ) - portNVIC_SYSTICK_CURRENT_VALUE_REG;
- ulCompleteTickPeriods = ulCompletedSysTickDecrements /
- ulTimerCountsForOneTick;
- portNVIC_SYSTICK_LOAD_REG = ( ( ulCompleteTickPeriods + 1 ) *
- ulTimerCountsForOneTick ) - ulCompletedSysTickDecrements;
- }
- /* 重启 Systick,调整系统定时器中断为正常值 */
- portNVIC_SYSTICK_CURRENT_VALUE_REG = 0UL;
- portENTER_CRITICAL();
- {
- portNVIC_SYSTICK_CTRL_REG = portNVIC_SYSTICK_CLK_BIT |
- portNVIC_SYSTICK_INT_BIT |
- portNVIC_SYSTICK_ENABLE_BIT;
- vTaskStepTick( ulCompleteTickPeriods );
- portNVIC_SYSTICK_LOAD_REG = ulTimerCountsForOneTick - 1UL;
- }
- portEXIT_CRITICAL();
- }
- }
4. 写在最后的话
STM32 家族中拥有不同的系列,特别是专为低功耗应用设计的 L 系列,为其设计 RTOS 低功耗特性实现时可以有更多的实现方式(例,某种模式下内核停止运行,此时可以使用外部定时器或者 RTC 来代替 Systick 作为系统定时器)。
|
.png) STMCU小助手
发布时间:2022-3-1 13:02
STMCU小助手
发布时间:2022-3-1 13:02
 微信公众号
微信公众号
 手机版
手机版