.png) STMCU小助手
发布时间:2022-4-26 22:51
STMCU小助手
发布时间:2022-4-26 22:51
|
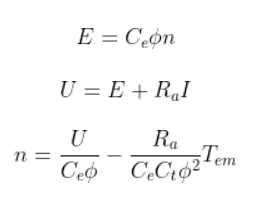
前言 原来做的差速小车是基于Arduino控制的,感觉有些简单,也有些基础,Arduino方便简单的同时,可操作性感觉也少了很多,所以想将控制器换成STM32,然后将树莓派作为上位机,STM32作为下位机,通过树莓派和STM32进行通讯,实现对差速移动小车的控制,本人也是寒假期间初学STM32,也是奔着应用去的,所以对于STM32编程原理方面可能不太精通,这里偏重于记录应用层面的知识。 一、PWM调速原理 直流电机驱动是最简单的,给电机通上电就能转,根据电机的公式: EYKOD`W)XO03D@BB.png")
可知:当提高电压时,反电势升高,进而转速升高,电压与转速大致有如图所示的关系 ![$[N``81R]7J0[J0G0P(I6ZQ.png](data/attachment/forum/202204/26/225218ppo2jk2bq25pp7bs.png "$[N``81R]7J0[J0G0P(I6ZQ.png")
所以我们只要控制给电机通电的电压即可控制电机的转速,但是在实际的控制中,控制直流电机需要通过H桥控制电机的正反转,如图,当T1和T4二极管导通时,有粉色通路;当T2和T3二极管导通时,有蓝色通路,这样我们就可以实现弱电控制强电,通过二极管的通断来控制电机的转向。 但是这样电机通电时电压就是Us,我们如果想自由的控制Us的电压值基本是不能实现的,因为电机是接到单片机的引脚上的,引脚的供电电压值是确定的,我们就要使用控制二极管的通断时间对电机的转速进行控制,即PWM控制。 图中的D1~D4二极管为续流的作用,因为电机中有绕组,在断电后,电感的电流不能瞬时变为0,所以在断电后电流沿棕色和绿色的通路放点。 

在一个周期内,我们通过控制通电的时间就可以调控平均电压,而平均电压的高低直接控制电机的转速,通电时间/周期,就可以得到占空比,我们也就是通过控制电机的占空比来控制电机的转速的。 C)IRM[[5CHG3$RI}78UI.png")
在实际应用过程中,我们不用自己搭建H桥,而是使用电机驱动板(如:L298N)对直流电机进行驱动,L298N内搭载两个H桥电路,可以实现对两个电机的转向和转速进行控制。 ![`9]]Z24TMKTS39LL_)96079.png](data/attachment/forum/202204/26/225220knvvt1bt1ftiq1it.png "`9]]Z24TMKTS39LL_)96079.png")
这是淘宝商家提供的电机驱动板控制表,将IN1~4接到单片机的引脚,我们就可以通过引脚输出PWM控制信号,对直流电机进行控制。 二、STM32编程实现 在STM32中如果想输出PWM信号,需要借助定时器,通过定时器的捕获/比较通道的PWM输出 LNGM.png")
当我们对定时器设置了预装载值arr和比较值ccr后,可以通过配置PWM模式,使定时器CNT计数值超过ccr后产生有效信号,并通过配置相应寄存器设置有效信号是1还是0,而配置PWM的输出方式,具体原理信息可以参考原子哥的视频,也可以参考中文参考手册的14.4.7内容。 
在程序中,我们使用库函数进行配置,配置步骤如下: 1.使能定时器和相关外设引脚时钟 :RCC_APBxPeriphClockCmd() 2.配置IO口为复用输出模式(查手册8.1.11)配置成相应的模式(复用推挽输出) 3.初始化定时器:TIM_TimeBaseInit() 4.初始化TIM2 Channe1234 PWM模式:TIM_OCxInit() 5.使能OCx通道的预装载寄存器:TIM_OC1PreloadConfig() 6.使能时钟:TIM_Cmd() 7.在主函数中配置占空比进行调速:TIM_SetCompare1()
总结 原理部分我讲的不清晰,我也是看原子哥的视频学的,大家可以通过传送门去B站看原子哥的视频,先更新PWM调速,因为这一部分我测试成功了,等我编码器来了在对编码器和蓝牙进行测试。 |
【福利三:雨露均沾·逢7狂欢】之五:STM32系统时钟PLL故障排除1例
【福利三:雨露均沾·逢7狂欢】之三:AI帮我查BUG
福利三:雨露均沾·逢7狂欢】之二:STM32F407VG串口通信乱码故障的排除
基于STM32F103的I2C主从机通信
OpenBLT移植到STM32F103战舰开发板上适用于所有STM32F103系列的Bootloader
TFT LCD 与 FSMC 的硬件连接大容量 STM32F10xxx FSMC 接口
单片机:初学者该了解的STM32F103基础知识
2025软件工具兔哥知道
STM32之继电器模块
STM32固件库分享,超全系列整理
 微信公众号
微信公众号
 手机版
手机版