.png) STMCU小助手
发布时间:2022-6-13 17:48
STMCU小助手
发布时间:2022-6-13 17:48
|
01. 通用定时器简介 STM32F4 的通用定时器包含一个 16 位或 32 位自动重载计数器(CNT),该计数器由可编程预分频器(PSC)驱动。STM32F4 的通用定时器可以被用于:测量输入信号的脉冲长度(输入捕获)或者产生输出波形(输出比较和 PWM)等。 使用定时器预分频器和 RCC 时钟控制器预分频器,脉冲长度和波形周期可以在几个微秒到几个毫秒间调整。STM32F4 的每个通用定时器都是完全独立的,没有互相共享的任何资源。 STM3 的通用 TIMx (TIM2~TIM5 和 TIM9~TIM14)定时器功能包括: 1.16 位/32 位(仅 TIM2 和 TIM5)向上、向下、向上/向下自动装载计数器(TIMx_CNT),注意:TIM9~TIM14 只支持向上(递增)计数方式。 2.16 位可编程(可以实时修改)预分频器(TIMx_PSC),计数器时钟频率的分频系数为 1~65535 之间的任意数值。 3)4 个独立通道(TIMx_CH14,TIM9TIM14 最多 2 个通道),这些通道可以用来作为: A.输入捕获 B.输出比较 C.PWM 生成(边缘或中间对齐模式) ,注意:TIM9~TIM14 不支持中间对齐模式 D.单脉冲模式输出 4)可使用外部信号(TIMx_ETR)控制定时器和定时器互连(可以用 1 个定时器控制另外一个定时器)的同步电路。 5)如下事件发生时产生中断/DMA(TIM9~TIM14 不支持 DMA): A.更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发) B.触发事件(计数器启动、停止、初始化或者由内部/外部触发计数) C.输入捕获 D.输出比较 E.支持针对定位的增量(正交)编码器和霍尔传感器电路(TIM9~TIM14 不支持) F.触发输入作为外部时钟或者按周期的电流管理(TIM9~TIM14 不支持) 02. 通用定时器时钟 定时器的时钟来源有 4 个: 1)内部时钟(CK_INT) 2)外部时钟模式 1:外部输入脚(TIx) 3)外部时钟模式 2:外部触发输入(ETR),仅适用于 TIM2、TIM3、TIM4 4)内部触发输入(ITRx):使用 A 定时器作为 B 定时器的预分频器(A 为 B 提供时钟)。 这些时钟,具体选择哪个可以通过 TIMx_SMCR 寄存器的相关位来设置。这里的 CK_INT时钟是从 APB1 倍频的来的,除非 APB1 的时钟分频数设置为 1(一般都不会是 1),否则通用定时器 TIMx 的时钟是 APB1 时钟的 2 倍,当 APB1 的时钟不分频的时候,通用定时器 TIMx的时钟就等于 APB1 的时钟。这里还要注意的就是高级定时器以及 TIM9~TIM11 的时钟不是来自 APB1,而是来自 APB2 的。 这里顺带介绍一下 TIMx_CNT 寄存器,该寄存器是定时器的计数器,该寄存器存储了当前定时器的计数值。 03. 定时器配置步骤 3.1 TIM3 时钟使能。 TIM3 是挂载在 APB1 之下,所以我们通过 APB1 总线下的时钟使能函数来使能 TIM3。调用的函数是:
3.2 初始化定时器参数 数, 设置 自动重装值 , 分频系数 ,计数方式 等。 在库函数中,定时器的初始化参数是通过初始化函数 TIM_TimeBaseInit 实现的:
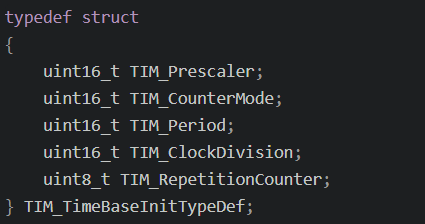
第一个参数是确定是哪个定时器,这个比较容易理解。第二个参数是定时器初始化参数结构体指针,结构体类型为
这个结构体一共有 5 个成员变量,要说明的是,对于通用定时器只有前面四个参数有用,最后一个参数 TIM_RepetitionCounter 是高级定时器才有用的,这里不多解释。 第一个参数 TIM_Prescaler 是用来设置分频系数的,刚才上面有讲解。 第二个参数 TIM_CounterMode 是用来设置计数方式,上面讲解过,可以设置为向上计数,向下计数方式还有中央对齐计数方式,比较常用的是向上计数模式 TIM_CounterMode_Up 和向下计数模式 TIM_CounterMode_Down。 第三个参数是设置自动重载计数周期值,这在前面也已经讲解过。 第四个参数是用来设置时钟分频因子。 针对 TIM3 初始化范例代码格式:
3.3 设置 TIM3_DIER 允许更新中断。 因为我们要使用 TIM3 的更新中断,寄存器的相应位便可使能更新中断。在库函数里面定时器中断使能是通过 TIM_ITConfig 函数来实现的:
第一个参数是选择定时器号,这个容易理解,取值为 TIM1~TIM17。 第二个参数非常关键,是用来指明我们使能的定时器中断的类型,定时器中断的类型有很多种,包括更新中断 TIM_IT_Update,触发中断 TIM_IT_Trigger,以及输入捕获中断等等。 第三个参数就很简单了,就是失能还是使能。 例如我们要使能 TIM3 的更新中断,格式为:
3.4 TIM3 中断优先级设置。 在定时器中断使能之后,因为要产生中断,必不可少的要设置 NVIC 相关寄存器,设置中断优先级。之前多次讲解到用 NVIC_Init 函数实现中断优先级的设置。 3.5 允许 TIM3 工作,也就是使能 TIM3 。 光配置好定时器还不行,没有开启定时器,照样不能用。我们在配置完后要开启定时器,通过 TIM3_CR1 的 CEN 位来设置。在固件库里面使能定时器的函数是通过 TIM_Cmd 函数来实现的:
这个函数非常简单,比如我们要使能定时器 3,方法为:
3.6 编写中断服务函数。 在最后,还是要编写定时器中断服务函数,通过该函数来处理定时器产生的相关中断。在中断产生后,通过状态寄存器的值来判断此次产生的中断属于什么类型。然后执行相关的操作,我们这里使用的是更新(溢出)中断,所以在状态寄存器 SR 的最低位。在处理完中断之后应该向 TIM3_SR 的最低位写 0,来清除该中断标志。 在固件库函数里面,用来读取中断状态寄存器的值判断中断类型的函数是
该函数的作用是,判断定时器 TIMx 的中断类型 TIM_IT 是否发生中断。比如,我们要判断定时器 3 是否发生更新(溢出)中断,方法为:
固件库中清除中断标志位的函数是:
该函数的作用是,清除定时器 TIMx 的中断 TIM_IT 标志位。使用起来非常简单,比如我们在TIM3 的溢出中断发生后,我们要清除中断标志位,方法是:
这里需要说明一下,固件库还提供了两个函数用来判断定时器状态以及清除定时器状态标志位的函数 TIM_GetFlagStatus 和 TIM_ClearFlag,他们的作用和前面两个函数的作用类似。只是在 TIM_GetITStatus 函数中会先判断这种中断是否使能,使能了才去判断中断标志位,而TIM_GetFlagStatus 直接用来判断状态标志位。 04. 硬件设计 用到的硬件资源有: 1) 指示灯 DS0 和 DS1 2) 定时器 TIM3 将通过 TIM3 的中断来控制 DS1 的亮灭,DS1 是直接连接到 PF10 上的,这个前面已经有介绍了。而 TIM3 属于 STM32F4 的内部资源,只需要软件设置即可正常工作。 05. 程序示例 timer.h
timer.c
main.c
结果验证 DS1 不停闪烁(每 600ms 闪烁一次),而 DS0 也是不停的闪烁,但是闪烁时间较 DS0 慢(1s 一次) |
【经验分享】STM32 HAL库移植FreeModbus详细步骤
【逢7发帖赢大礼】STM32开发之IC门禁卡UID读取方法!
实战经验 | Keil工程使用NEAI库的异常问题
经验分享 | FDCAN数据段波特率增加后发送失败的问题分析
STM32几种流行开发环境的优缺点
好用软件推荐-TouchGFX Designer
OpenSTLinux 6.1发布:M33-TD加持+安全升级,STM32MPU开发效率翻倍!
【经验分享】STM32CubeIDE汉化
手把手教你VSCode搭建STM32开发环境
RTOS在STM32中的应用
 微信公众号
微信公众号
 手机版
手机版