.png) STMCU小助手
发布时间:2022-8-2 17:45
STMCU小助手
发布时间:2022-8-2 17:45
|
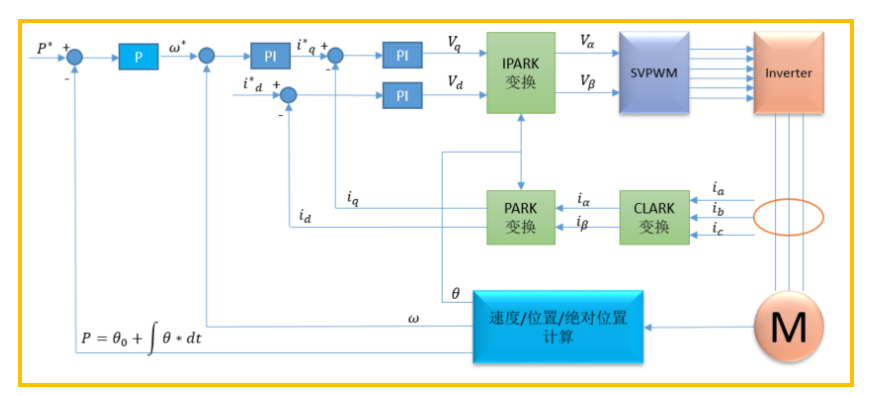
前言 在 MC SDK 5.x 中有两个环路控制,分别是电流环和速度环,有些应用需要使用到位置环,比如无人机的云台电机控制,地 铁闸机等等应用,本文将阐述如何在现有 ST 电机库基础上增加简易的位置环。 1.理论基础 以表贴电机为例,一般的 FOC 电机控制是两环控制,速度环+电流环的控制方式,速度环为外环,电流环为内环,Idref = 0(d 轴电流参考为 0)的控制为常见控制;参考速度环输出参考转矩后供后端电流环路; 如果增加位置环最简单和直接的方式即为将速度环换为位置环,即变为位置环+电流环的方式: 
如果在有减速齿轮电机上,需要加入速度环以便更快速的到达给定位置,也就是三环控制:位置环+速度环+电流环,框图如下: 
为了方便控制,以及考虑精度问题,角度单位为 rad*10000,比如电机转动 10 圈,也就是 10 圈后的位置,则该位置的设定角度为: |

MC_SDK中增加位置环.pdf
下载1.02 MB, 下载次数: 20
【福利三:逢7发帖赢大礼】想要充分利用STM32H743VI片内的RAM空间(但并不顺利)
基于stm32平台上的IC-MU磁绝对值编码器SPI通讯和码盘数据处理
使用STM32 MCU和MPU连接PDM数字麦克风
分享STM32资料-采用 STM32U031R8 MCU 的 STM32 Nucleo-64 开发板,官方资料,数据手册等资料
HRTIM 指南
使用 STM32 的 DWT 单元监控内存
DAC,COMP,HRTIM Fault 功能的使用
一个软件引起的 LSE 驱动不良的问题
STM32 GUI LTDC 最大像素时钟评估方法
STM32 Cordic 运算速度评估
 微信公众号
微信公众号
 手机版
手机版